一种精密环缝激光焊接工装的制作方法
1.本技术涉及焊接工装的领域,尤其是涉及一种精密环缝激光焊接工装。
背景技术:
2.焊接是一种以加热、高温或高压的方式接合金属的金属连接工艺,根据操作方式的不同,可分为手动焊和自动焊。
3.自动焊通常是通过焊机实现的,使用者需要先将工件装夹在焊机的工作台上,在通过活动设置在焊机上的焊枪实现工件的焊接。通过焊机进行焊接工作方便,且焊接效率高。
4.针对上述中的相关技术,发明人认为当焊接工作的内容为采用船形焊的焊接手法来焊接环缝时,焊枪难以一边围绕工件旋转,一边始终与工件上的待焊接面保持四十五度的夹角,存在焊接环缝不便的缺陷。
技术实现要素:
5.为了改善焊接环缝不便的情况,本技术提供一种精密环缝激光焊接工装。
6.本技术提供的一种精密环缝激光焊接工装采用如下的技术方案:
7.一种精密环缝激光焊接工装,包括用于和焊接工作台固定相连的底座,所述底座上倾斜固设有基准板,所述基准板上旋转连接有定位柱,所述基准板上设置有用于控制定位柱自转的旋转机构,所述基准板的倾斜端面上固设有支撑座,所述支撑座上滑动设置有压紧座,所述压紧座上旋转连接有用于和定位柱卡紧固定工件的压紧柱,所述定位柱上设置有用于阻止工件和定位柱在定位柱径向上相对位移的定位机构,所述支撑座上设置有用于控制压紧座滑动的压紧机构。
8.通过采用上述技术方案,使用者将通过压紧机构和压紧座的滑动实现定位柱和压紧柱是否卡合固定工件的控制,通过定位机构和旋转机构控制工件和定位柱的同步旋转,通过基准板的倾斜使得焊枪在静止状态下始终与工件上的待焊接面呈四十五度夹角,以船形焊的方式焊接环缝方便,焊接质量高且加工效率高。
9.可选的,所述定位机构包括通过螺纹件可拆卸式固定在定位柱端面上的花键,所述花键用于和工件嵌合。
10.通过采用上述技术方案,花键对工件的抵接限位使得工件与定位柱同步旋转,花键拆安方便,使用方便。
11.可选的,所述支撑座和基准板上均设置有若干用于检测工件端面跳动和径向跳动的激光位移传感器。
12.通过采用上述技术方案,通过激光位移传感器实时监控工件的端面跳动和径向跳动,跳动误差过大时使用者可及时停止焊接加工并检修设备,有效降低工件质量因跳动误差过大而降低的可能性。
13.可选的,所述激光位移传感器固定连接有检测板,所述检测板上贯穿设置有腰形
孔,所述腰形孔内穿设有用于和对应的支撑座或基准板螺纹相连的检测螺栓。
14.通过采用上述技术方案,检测螺栓与检测板的相对位置可通过检测螺栓在腰形孔内位移而改变,进而检测螺栓与激光位移传感器的相对位置可调,激光位移传感器拆安方便且设置位置可在激光位移传感器未拆下时微调,使用方便。
15.可选的,所述支撑座上设置有用于检测压紧柱处的压紧力的压紧力矩传感器。
16.通过采用上述技术方案,压紧力矩传感器对压紧力进行实时监控和闭环反馈,使用者可及时通过调节压紧座的位置来调节压紧力的大小,有效避免压紧力超差。
17.可选的,所述支撑座上设置有用于减小压紧柱的旋转阻力的旋转轴承。
18.通过采用上述技术方案,旋转轴承有效增强压紧柱的旋转顺畅度和平稳性,焊接加工的质量更稳定。
19.可选的,所述压紧座上可拆卸式排列固设有旋转座和承载座,所述旋转座上可拆卸式固设有压紧转轴,所述压紧柱和旋转轴承均套设在压紧轴上,所述承载座设置在旋转座远离定位柱的一侧,所述压紧力矩传感器设置在压紧转轴和旋转座之间,所述压紧力矩传感器的一端与压紧转轴可拆卸式固定相连,所述压紧力矩传感器的另一端与旋转座可拆卸式固定相连。
20.通过采用上述技术方案,压紧柱处的压紧力经由压紧转轴传导至压紧力矩传感器上,压紧力矩传感器不与工件直接接触,压紧力矩传感器不易与工件发生摩擦损伤,压紧力矩传感器拆安方便,该工装日常维护方便。
21.可选的,所述压紧转轴包括安装轴和连接轴,所述连接轴同时与压紧力矩传感器和旋转座可拆卸式固定相连,所述安装轴的一端与连接轴螺纹相连,所述安装轴的另一端呈与旋转轴承相配合的阶梯形设置,所述旋转轴承套设在安装轴远离连接轴的端部处,所述压紧柱上设置有用于和旋转轴承嵌合的限位槽,所述压紧柱上穿设有用于阻止限位槽与旋转轴承分离的安装螺栓。
22.通过采用上述技术方案,安装螺栓使得压紧柱、旋转轴承以及安装轴可便捷拆安,单独检修或更换压紧柱和旋转轴承方便。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过压紧机构、压紧座的滑动以及定位机构实现工件的装夹,通过旋转机构控制工件和定位柱同步旋转,通过基准板的倾斜使得焊枪在静止状态下始终与工件上的待焊接面呈四十五度夹角,以船形焊的方式焊接环缝方便;
25.2.通过压紧力矩传感器实时监控压紧力,压紧力始终在适宜范围内,工件不易损伤且压紧定位的效果好。
附图说明
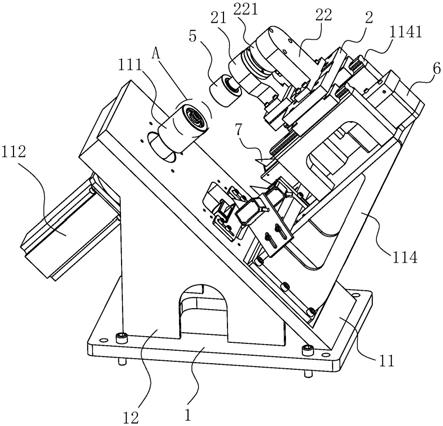
26.图1是本技术实施例的整体结构示意图。
27.图2是图1中a部分的局部放大示意图。
28.图3是本技术实施例的针对穿移孔内部结构的剖视图。
29.图4是图3中b部分的局部放大示意图。
30.图5是图3中c部分的局部放大示意图。
31.附图标记说明:1、底座;11、基准板;111、定位柱;112、旋转机构;113、花键;114、支
撑座;1141、直线导轨;1142、检测块;12、加强筋;2、压紧座;21、旋转座;211、设置孔;212、连接螺栓;22、承载座;221、压紧力矩传感器;3、压紧转轴;31、连接轴;311、穿移孔;32、连接套;33、安装轴;4、旋转轴承;5、压紧柱;51、限位槽;52、安装螺栓;6、压紧机构;7、激光位移传感器;71、检测板;711、腰形孔;72、检测螺栓。
具体实施方式
32.以下结合附图1
‑
5对本技术作进一步详细说明。
33.本技术实施例公开一种精密环缝激光焊接工装。参照图1,一种精密环缝激光焊接工装包括底座1和倾斜固设在底座1上的基准板11,底座1通过螺栓与工作台可拆卸式固定相连。基准板11与底座1之间的夹角为四十五度,底座1上焊接固设有用于支撑基准板11的加强筋12。基准板11上旋转连接有定位柱111,定位柱111的轴线垂直于基准板11端面,定位柱111的轴线与底座1顶面之间的夹角为四十五度。基准板11上设置有用于控制定位柱111自转的旋转机构112,本实施例中的旋转机构112为固设在基准板11上的伺服电机,伺服电机的输出端与定位柱111传动相连。
34.参考图1,基准板11上位于定位柱111的下方通过螺栓固设有支撑座114,支撑座114上滑动设置有压紧座2,压紧座2的滑动方向平行于定位柱111的轴向,支撑座114上固设有用于与压紧座2滑动相连的直线导轨1141。压紧座2上旋转连接有压紧柱5,压紧柱5与定位柱111同轴且相对设置。支撑座114上设置有用于驱动压紧座2滑动至压紧柱5和定位柱111卡合定位工件的压紧机构6,定位柱111上设置有用于在压紧柱5和定位柱111卡合定位工件时,阻止工件和定位柱111发生定位柱111径向上的相对位移的定位机构。
35.使用者将工件放置在定位柱111和压紧柱5之间,进而通过压紧机构6驱动压紧座2滑动至压紧柱5和定位柱111双向限位工件,同时通过定位机构在另一方向上阻止工件位移,从而将工件固定在压紧柱5和定位柱111之间。焊接工件上的环缝时,通过伺服电机驱动定位柱111旋转,定位柱111带动工件自转,焊枪无需进行复杂的位移运动即可在焊接环缝时让焊接夹角始终为四十五度,采用船形焊的方式焊接环缝方便,焊接质量高且焊接难度降低。
36.参考图2,定位机构包括通过螺栓可拆卸式固定在定位柱111端面上的花键113,花键113用于和预先开设在工件上的定位槽嵌合。当花键113与工件嵌合时,工件于定位柱111同步旋转,抵接限位的效果稳定。当工件规格或工件上预先开设的定位槽的形状变化或花键113磨损时,使用者均可通过旋下螺栓来更换花键113,使用方便。
37.参考图3,压紧机构6包括固设在支撑座114上的压紧气缸,压紧气缸的活塞杆通过支架与压紧座2固定相连。使用者可通过压紧气缸驱动压紧座2滑动,压紧力平稳且控制操作简单。
38.参考图3和4,为了方便使用者调节压紧力的大小,压紧座2上设置有用于检测压紧柱5处压紧力的压紧力矩传感器221。为了方便使用者安装压紧力矩传感器221,压紧座2上通过螺栓可拆卸式排列固设有旋转座21和承载座22,承载座22设置在旋转座21远离定位柱111的一侧。旋转座21上可拆卸式固设有压紧转轴3,压紧柱5设置在压紧转轴3远离承载座22的一侧。压紧力矩传感器221位于压紧转轴3和承载座22之间,压紧力矩传感器221的一端与压紧转轴3可拆卸式固定相连,压紧力矩传感器221的另一端通过螺栓与承载座22可拆卸
式固定相连。
39.压紧柱5处的压紧力经由压紧转轴3传导至压紧力矩传感器221上,压紧力矩传感器221不与工件直接接触,压紧力矩传感器221不易与工件发生摩擦损伤。当压紧力矩传感器221需要拆下检修时,使用者可手动解除压紧力矩传感器221上的限位效果,从而可将压紧力矩传感器221由承载座22和旋转座21之间取出。反向操作即可复位压紧力矩传感器221,压紧力矩传感器221拆安方便。
40.参考图3和4,压紧转轴3包括安装轴33、连接套32以及连接轴31,连接轴31呈大径端靠近承载座22的阶梯轴状设置。旋转座21上贯穿设置有设置孔211,设置孔211的轴向平行于压紧座2的滑动方向。连接轴31的大径端位于旋转座21靠近承载座22的一侧,连接轴31的小径端用于穿设于设置孔211内。旋转座21上穿设有三个用于固定连接旋转座21、连接轴31以及压紧力矩传感器221的连接螺栓212,三个连接螺栓212环绕设置孔211的轴线排列设置。连接轴31的大径端上设置有用于供连接螺栓212贯穿的穿移孔311,连接螺栓212的栓体端部顺次穿过旋转座21和穿移孔311后与压紧力矩传感器221螺纹相连。
41.参考图4,连接轴31的小径端插设于连接套32内,连接轴31与连接套32螺纹相连。安装轴33的一端插设于连接套32远离连接轴31的端部内,且该端部与连接套32螺纹相连。安装轴33的另一端上套设有旋转轴承4,且该端部上设置有用于定位旋转轴承4内圈的轴向位置的台阶面。压紧柱5套设在旋转轴承4的外圈上,压紧柱5上设置有用于与旋转轴承4嵌合的限位槽51,限位槽51呈小径端远离旋转轴承4设置的阶梯形设置,限位槽51用于卡合定位旋转轴承4的外圈。压紧柱5上同轴穿设有沉头式安装螺栓52,安装螺栓52的栓体端部在贯穿压紧柱5后与安装轴33螺纹相连。
42.旋转轴承4有效减小了压紧柱5的旋转阻力,压紧柱5随工件自转顺畅,焊接环缝的效率高且质量好。当压紧柱5或旋转轴承4需要拆卸检修时,使用者旋下安装螺栓52,顺次取下压紧柱5和旋转轴承4,也可先旋下安装轴33检查压紧柱5和旋转轴承4之间是否出现可影响该工装使用的装配质量上的问题。压紧柱5、旋转轴承4、旋转座21、压紧力矩传感器221以及承载座22均可拆分,组装使用方便,局部更换零部件方便。
43.参考图1,基准板11上固设有一个激光位移传感器7,支撑座114上固设有三个激光位移传感器7。激光位移传感器7构成对工件的端面跳动和径向跳动的实时监控系统,便捷检测和记录工件随定位柱111旋转时的端面跳动和径向跳动,从而方便使用者在端面跳动和径向跳动误差值过大时及时停止焊接加工并检修。
44.参考图1和5,支撑座114上通过螺栓可拆卸式固设有检测块1142,三个激光位移传感器7分散设置在检测块1142上。激光位移传感器7通过螺栓可拆卸式固定连接有检测板71,检测板71上贯穿设置有腰形孔711。腰形孔711内穿设有检测螺栓72,检测螺栓72用于与对应的检测块1142或基准板11螺纹相连。激光位移传感器7的设置位置可通过检测螺栓72与腰形孔711相对位置的变化来进行微调,需要检修激光位移传感器7时,也可通过旋下检测螺栓72来拆下检测板71和激光位移传感器7,使用方便。
45.本技术实施例一种精密环缝激光焊接工装的实施原理为:使用者将工件放置在定位柱111和压紧柱5之间,手动嵌合花键113和工件,通过压紧气缸控制压紧座2滑动至压紧柱5和定位柱111卡紧工件,焊接工件上的环缝时,通过伺服电机驱动定位柱111旋转,定位柱111带动工件自转,焊接可在静止状态下实现焊接夹角始终为四十五度的环缝焊接,采用
船形焊的方式焊接环缝方便,焊接质量高且焊接难度降低。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1