用于具有移动片材或卷筒的激光加工机器的表征方法及系统与流程
用于具有移动片材或卷筒的激光加工机器的表征方法及系统
发明领域
1.本发明是关于一种用于表征和校准具有移动片材或卷筒或材料的激光加工机器的方法及关于实施该方法的激光加工机器。
背景技术:
2.激光切割机器可用于各种材料,例如纸、金属、木材或塑料。
3.激光加工机器引导激光束朝向待加工的片材板材,以适当的聚焦、功率和脉冲持续时间,对片材进行标记、折痕或切割。激光是通过将激光源传送到x
‑
y传送台上来进行定位,或通过利用一个或两个可倾斜的镜将激光束沿二维方向偏离来进行定位。在后一种情况下,由于激光源到片材加工点的距离不同,有时会调整激光的聚焦。激光加工机器可以对激光视场内的板材进行加工。
4.由于环境变化,如温度或湿度变化,对于激光系统的相同输入信号,发生在片材上的加工实际点发生变化。因此,要获得良好的精度,必须对激光加工机器进行校准。
5.一台未校准的机器在输入端接收一个标称信号,它对应于机器工作区域(表面)中的标称点。当用所述信号加工片材时,片材的切割/标记发生在工作区域中的加工点,这与标称点不同。校准计算要应用于标称信号的校正,以便在标称点进行片材的切割/标记;换句话说,校准确保加工点与标称点一致。一旦标定和加工点开始偏移超过机器精度规范的一部分,必须定期进行机器的校准。表征与校准的不同之处在于,表征仅测量机器与完全地校准的机器的差异程度,但不计算补偿此差异的任何校正。例如,机器的表征可以测量一组的标称点和一组的加工点之间的距离。
6.校准激光加工机器的方法包括放置覆盖机器工作区域的片材,在一组的标称点标记(或切割)片材并测量在片材上的所述标记的加工位置。然后,计算要应用于该组每个标称点的一组校正信号。工作区域中任意(标称)位置的校正是通过由一组的校正的插值获得。出于实际原因,测量或被加工位置是离线进行的,通过将加工过的片材从机器中取出放至测量装置中,如us5,832,415中所公开的。这会造成机器使用的中断,需要离线测量设备,并且需要操作员的协助。
技术实现要素:
7.本发明涉及一种用于表征激光加工机器的方法。还涉及校准激光加工机器的方法,以及涉及实现这些方法中的任何一种的激光加工机器。
8.本发明适用于加工单独的片材物料以及卷筒物料的机器(甚至可以是投入卷筒或物料及输出片材物料或具特殊形状物料的片状的机器)。我们用介质来表示片材或卷筒或材料。
9.本发明适用于加工机器,其当介质于机器的工作区域内移动时加工介质。
10.为了表征该机器,该方法沿机器的工作区域的高度移动介质,根据一组标称点使用激光系统加工在介质上的一组标记及使用摄像机记录每个单独的标记。标记介质的过程
(加工)与介质的运动同步。标记被散布在介质上,使得每个被记录的标记可以追溯到它被加工的点。通过运动操作和加工操作的同步来选择标记的空间配置。例如,标记可以被定位,使它们在介质上的跨度面积比在工作区域中的更小。
11.介质的同步加工及移动有几个优点。它导致介质上的一组标记呈现出与工作区域中的一组加工点不同的几何配置。这允许在根据校准/表征限制分布加工位置的同时选择介质上的标记位置。例如,标记可以在要废弃的介质部分中执行(这取决于工作)。它也可以仅使用介质的一小部分来执行,例如在片材材料的正面或背面的条带。此外,表征/校准可以在不停止生产的情况下在线执行—因为它可以在介质的未使用部分执行,前提是若干摄像机放置在机器工作区域的下游。最后,它联合表征和补偿机器的运动装置(移动介质的装置)的缺陷和激光的加工位置的误差。
12.例如,标记可以位于介质上的矩形区域中。矩形区域的高度小于覆盖工作区域中的一组加工位置的(最小)矩形区域的高度。
13.为了校准激光加工机,该方法回算出每个单独的标记(例如在工作区域坐标系中)的加工点,从它的摄像机读数和从介质的运动。这导致将一组的加工点与它们各自的标称点进行比较以产生机器的几何较准。
14.优选地,标记在介质上被分组成集群。每个集群代表一组的标称位置,它们跨度工作区域的部分高度。集群的大小应该足够小以被摄像机记录。有利地,集群可使用二维摄像机在一次拍摄中被记录或可使用一维相机通过平移扫描来被记录。例如,分组成集群允许通过将一组固定摄像机放置在工作区域的下游对机器进行表征。该组相机可以当介质由机器的传送系统(与激光加工介质时用于移动介质的系统相同)移动的同时扫描已加工的介质。
15.优选地,划刻线宽度是从摄像机记录的标记测量的。划刻线宽度可用于表征(或校准)激光束的聚焦。
16.优选地,划刻线的颜色值是从摄像机记录的标记测量的。颜色可用于表征(或校准)激光束功率,以及激光束是否已完全穿透介质。我们所说的颜色是指摄像机记录的一个或多个维度的强度值。例如,它可是灰度值或红
‑
绿
‑
蓝值。
17.本发明还涉及一种方法以表征(和校准)激光加工机器,该激光加工机器包括具有重叠工作区域的两个(或更多)激光源。标记在工作区域的重叠区域中被加工以将两个激光源配准到公共坐标系中。使用多个激光源允许加工更宽的介质。
18.一旦执行了校准,就在机器上应用校准,使得当激光应用于被机器加工的下一个介质时,加工点与标称点相匹配。
19.当在没有校准的情况下执行表征时,表征可能示出机器执行的加工仍在规范内。如果表征示出机器接近不符合规范,它也可能示出机器可能很快需要一些维修。如果表征不符合规范,它也可能产生误差。
20.本发明还涉及实施上述方法的激光加工机器。激光加工机器包括传送系统以在工作区域内传送介质。传送系统可以例如是传送带。该机器还有激光系统来加工介质。激光系统能在输送系统移动介质的同时加工介质。
21.关于本发明的进一步细节由从属权利要求中描述。
附图说明
22.本发明的实施例是通过附图中的例子来说明的,其中的附图标记表示相同或相似的元件,其中;
23.图1以主视图示出激光加工机器;
24.图2a至2d显示了当介质于激光加工机器的工作区域移动的同时被激光加工;
25.图3示出图2所示的标记的加工点,在工作区域坐标系中;
26.图4a至4d为标记的例子。左边示出单独标记,右边示出四个的这样的单独标记的集群;
27.图5示出在具有两个激光和一个重叠区的机器上的介质被加工;
28.图6a和6b分别示出用于校准的系统和未校准的系统的标记的例子。
具体实施方式
29.图1显示了根据本发明的机器1的例子。图1的机器包括激光2,借助于镜子20和21,激光2被引导到工作区域5。介质3的加工发生在工作区域5中。加工可以是一个标记,切割或压痕的操作。介质由与激光加工相容的任何材料制成,例如,纸张、纸板、木材、金属、塑料、玻璃、皮革、层压基材等。介质由输送带4输送,和/或如果是卷筒状则是由一组的滚轮。优选地,介质在被激光加工的同时以等速被输送。介质沿工作区域的高度6移动。在工作区域的出口处放置了若干摄像机7(只显示了两个),被定位和被定向以记录在校准操作中正进行激光加工的一组标记。输送带可用于将介质输送到于工作区域出口处的摄像机视场。
30.对于如图1所示的机器,激光的聚焦可能需要根据加工点进行调整,因为介质与激光之间的距离在工作区域内不同。
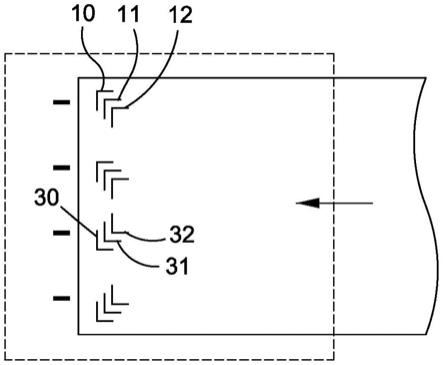
31.图2a到2d更好地解释了激光加工机器的表征。图2a到2d表示介质3在被激光加工时穿过工作区域5的快照。在图2a中,激光加工一系列的校准标记10、30。图2b显示了几秒后相同的介质,在工作区域中前进了一点,在那里激光加工第二系列的校准标记11、31。图2c显示了几秒后相同的介质,在工作区域中前进了一点,在那里激光加工第三系列的校准标记12、32。图2d显示了几秒后相同的介质,接近工作区域的末端,在那里激光加工第四系列的校准标记13、33。在这个例子中,所有的校准标记都包含在矩形区域8内,其高度9(和表面)小于工作区域的高度6(和表面,分别地)。通常,矩形的高度可能比工作区域的高度小10至100倍。
32.请注意的是工作区域不必是矩形(即具有直边)。工作区域包含在激光扫瞄器的视场内。工作区域可以是视场本身。另请注意的是,介质可能比工作区域更宽或更窄(或相等宽度)。机器的表征是关于它的测量精度。校准是使用从表征发出的测量以改正机器的表现。请注意的是,我们可以(仅)通过测量标记的集群来表征机器。将此标记的集群与理论的集群(根据标称输入值获得)进行比较,可以检查机器是否仍在规范内工作,而不必回算工作区域中标记的点。
33.优选地,介质上的标记的跨度小于它们相应的在工作区域中的加工点的跨度。换句话说,如果画一个紧紧地覆盖着介质上的标记的第一矩形和一个紧紧地覆盖着一组它们各自的加工所发生点(工作区域中)的第二矩形,那么第一矩形将小于第二个矩形。
34.请注意的是,可以选择于介质正面和背面加工标记,在这种情况下,我们将标记划
分为两组,第一组带有于介质正面的标记,第二组带有于介质背面的标记,并测量跨度为两个矩形的跨度之和:一个用于介质的正面,一个用于背面。然后我们将它们在介质上的面积总和与它们在工作区域中相应矩形的总和进行比较。
35.本发明的关键方面之一是在充分地覆盖工作区域以进行校准至规范的同时,将介质中的标记定位在一组便利的点(可能是与工作有关的)。我们倾向于至少有一些标记分组的解决方案(即至少有两个标记,这些标记的加工点在工作区域中是散布分开的,并且在介质上被分成组)。
36.图3显示了工作区域坐标系中的加工位置。这些位置对应于图2的标记。位置100、110、120和130分别对应于标记10、11、12和13。位置100、110、120和130分别对应于标记10、11、12和13。因此,在介质坐标系中的标记的跨度小于工作区域坐标系中的标记的跨度。通过选择标记的点(在介质坐标系中)位于将要丢弃的介质部分,它可以减少废料并在生产的同时执行校准。此外,将标记分组成集群有助于记录。
37.如图2所示,为了校准或表征该机器,该方法沿机器工作区域的高度移动介质,根据一组的标称点使用激光加工在介质上的一组的标记。通过连续输送介质至工作区域外,摄像机可记录标记。标记介质的过程(加工)与介质的运动同步。标记被散布在介质上,使得每个被记录的标记可以追溯到它被加工的点。在实践中,标称点的选择,使得如果一切都完全地被校准,那么标记通过边限60、61在介质上被散布分开,该边限的选择根据预期的定位噪声(标记的定位噪声添加至输送的其中之一)和摄像机区分两个标记所需的最小距离。在实践中,标记以少量60、61被移位或缩放。标记可以是l形,也可以是简单的点状、十字形、圆形、多边形等。显示在图2的标记是由激光顺序绘制(被加工),标记之间没有任何延迟,以按列而言。换句话说,若干标记(每个集群的一个标记)是沿基本相同的列(或y坐标)对齐的。
38.绘制校准标记的顺序和方法可分为多个部分,并插入激光加工的正常顺序,使得激光系统普遍于标记被加工的瞬间之间加工基材。
39.对于校准激光加工机器,该方法回算出每个单独的标记(在工作区域坐标系中)的加工点,从它的摄像机读数和从介质的运动(以及它被加工的确切时间)。这导致将一组的加工点与它们各自的标称点进行比较,从而产生用于每个标称点的一组误差向量。请注意的是,可以使用额外的参数,例如激光聚焦,导致多维校准(这里是三维误差向量)。用于任何输入点的误差都可以通过插值获得,从而产生为工作区域的每个点定义的前向传递函数。这个函数可以被反转,产生反转的传递函数,其给出了一个适用于任何标称输入的校正向量。使用该校正,被加工的输出与标称输入匹配。机器的校准是一组的校正向量。它也可以是给机器任何输入的校正函数。如果一组的校正向量是二维,或者如果校正函数具有二维(在输入和输出中),则校准是几何的;二维代表几何坐标。
40.图6a显示了一个示例,其中标记被已校准的系统加工,即标称点等于加工点。它导致一组的均匀地移位的标记(标记不需要均匀地间隔的)。图6b显示了一个未校准的系统的示例,该系统使用与图6a中相同的标称点,但由于系统的不足,每个标记的(加工)位置偏离其所需(标称)位置。选择标记之间的距离60、61使得由未校准的系统(如图6b中所示的系统)加工的标记重叠的概率接近于零。
41.功率可以通过测量标记的颜色来测量,或通过标记是否穿过介质或部分穿过介质来测量。功率是指激光划刻线的长度单位所传递的能量。因此,它与激光的输出功率、脉冲
持续时间和加工速度有关。
42.聚焦可通过测量激光划刻线的宽度来测量。
43.优选地,标记在介质上被分组成集群。图4a至4e显示了使用不同基本形状的这类集群的示例。图4a显示了l形标记。例如,标记10对应于图3中的标称点100,标记11对应于图3中的标称点110(同样适用于图4b到4e)。标记的集群显示在图的右侧。若干标记的每一个必须根据x和y方向稍微移位。按照惯例,x方向与图的水平方向(以及查看区域的高度)对齐,而y方向与x方向垂直。
44.图4b显示了一个标记,其中x和y坐标测量是解耦的。标记10分别由子标记10a和10b组成。每个的子标记(10a、10b)有不同的移位以形成如图右侧所示的集群。
45.图4c显示了一个标记的例子,其只需根据y方向移位以形成集群。
46.图4e显示了一个圆形标记,其中圆圈的大小是变化的,但标记位于固定位置以形成集群。
47.许多替代方法可用于测量标记的集群。例如,可以在工作区域的下游放置几个固定的摄像机,使得标记的每个集群通过传送系统的移动都在摄像机下方。固定摄像机是指摄像机在加工介质期间和执行根据本发明的方法期间不移动(但可能在加工作业期间位移)。所述示例的摄像机优选地是二维摄像机,但也可以是线性摄像机,其中像素线的定向横向于介质的运动。
48.替代地,可以使用安装在线性位移导轨上的单一摄像机。位移的执行从运动方向(即沿y方向)横向以扫描若干标记的所有集群。此外,位移导轨必须有一系统来测量摄像机的位置以确定标记的集群之间的空间关系。
49.替代地,不是移动摄像机,我们可以根据所述横向方向移动介质。
50.本发明还涉及一种方法以表征(和校准)激光加工机器,该激光加工机器包括具有重叠工作区域(51、52)的两个(或更多)激光源,其中标记(30、32、32、40、41、42)在工作区域的重叠区域53中被加工以将激光源配准到公共坐标系中,如图5所示。使用多个激光源允许加工更宽的介质。如果,在一方面,在介质上的标记,与另一方面,加工点和激光id,存在一对一的关系,整个系统的校准可以通过将校准方法单独应用于每个激光子系统来执行。工作区域的坐标系对所有激光需共用。
51.例如,一个典型的系统会有2到4个激光源。尽管如此,该方法适用于任意数量的激光源。
52.本公开中使用的一些定义:
53.标称点:在工作区域坐标系中的点,即是如果激光机经过完全校准,标记加工将发生的点。
54.加工点:在工作区域坐标系中的点,即是在实践中进行标记加工的点。
55.用激光“加工”,指的是对介质产生永久影响的任何激光操作,例如标记、切割或压痕。
[0056]“激光束位置”,指的是如果通过将激光源传输到x
‑
y传送台上来进行激光定位的,激光束的x
‑
y位置。“激光束位置”,指的是如果利用一个或两个可倾斜的镜沿二维方向偏离激光束来控制激光的,二维激光束的定向。“激光束位置”,指的是如果激光可以沿x
‑
y维度移动并使用两个镜子定向,光束的x
‑
y位置和二维方向定向。“标记”,指的是一种参考标记,
其形状设计为易于识别并位于图像中。
[0057]“二维摄像机”,指的是像今天的手机一样的标准摄像机。换句话说,摄像机的传感器是二维的。根据这个定义,标准的颜色摄像机被认为是二维摄像机,即使由摄像机的每个颜色的像素输出是三维(红色、绿色和蓝色分)。一个非二维摄像机的例子是线性摄像机,其在每次曝光中只输出一线图像。
[0058]
备注:在权利要求中,为了避免与英文单词“or”的使用产生歧义,我们使用大写字母“or”运算符来指定逻辑“or”运算。如果任何输入为真,则逻辑“or”运算返回真。如果所有的输入都是假的,那么输出也是假的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1