将隔膜部件安装于隔膜毂的方法以及将隔膜部件安装于隔膜毂的机器人臂装置与流程
1.本发明涉及将隔膜部件安装于隔膜毂的方法以及将隔膜部件安装于隔膜毂的机器人臂装置。
背景技术:
2.以往,隔膜式电磁阀用于流体的流通/切断的控制。
3.例如,如图10所示,以往的隔膜式电磁阀具有:电磁阀主体部110,其具有流路110a、110b开口的隔膜落座面112;隔膜部件120,其以落座于电磁阀主体部110的隔膜落座面112的方式设置;隔膜毂130,其对隔膜部件120进行保持;移动芯(在图10中未图示),其与隔膜毂130一体;以及线圈收纳部(在图10中未图示),其使电磁力作用于移动芯,使该移动芯向远离电磁阀主体部110的隔膜落座面112的方向移动,从而使隔膜部件120从隔膜落座面112分离。
4.更详细而言,隔膜部件120具有:圆柱状主体部123;薄壁弯曲部124,其呈环状设置于该圆柱状主体部123的外周;以及厚壁外周部125,其呈环状设置于薄壁弯曲部124的更外侧,在圆柱状主体部123的与隔膜毂130相对的安装表面侧设置有小径凹部122,在该小径凹部122的里侧还设置有大径凹部121。另一方面,隔膜毂130具有:轴部132,其能够与小径凹部122嵌合;以及扩径部131,其与该轴部132连接且能够与大径凹部121嵌合。
5.以往,隔膜毂130和隔膜部件120利用隔膜部件120的弹性变形,通过作业者的手工作业而被嵌合(以及拆卸)。
6.关于隔膜式电磁阀的其他基本的构造,例如在日本特开2009-257438(专利文献1)中公开。
7.现有技术文献
8.专利文献
9.专利文献1:日本特开2009-257438
10.专利文献2:日本特开2019-150915
技术实现要素:
11.发明要解决的课题
12.如前所述,通过人工来进行将隔膜毂与隔膜部件嵌合(以及拆卸)的作业。
13.但是,预计在不久的将来,人工不足的情况将更加严重,因此本案发明人对基于机器人导入的自动化进行了研究。
14.关于把持工件的机器人手,开发了各种类型的机器人手。例如,在日本特开2019-150915(专利文献2)中公开了使用爪状的工件把持部来把持工件的机器人手。
15.但是,隔膜部件是当被施加不期望的力时有可能会不期望地产生塑性变形的精密部件。另一方面,为了使隔膜部件与隔膜毂嵌合,需要施加相应的力。
16.本案发明人进行了深入的研究,结果发现利用空气吸引力来把持隔膜部件对避免不期望的变形并且可靠地把持隔膜部件是有效的,进而发现关于用于对隔膜毂进行嵌合的力的施加方法,也能够更可靠地避免隔膜部件的不期望的变形。
17.本发明是基于以上见解而进行的。本发明的目的在于,提供能够更可靠地避免隔膜部件的不期望的变形的将隔膜部件安装于隔膜毂的方法以及将隔膜部件安装于隔膜毂的机器人臂装置。
18.用于解决课题的手段
19.本发明是一种将隔膜部件安装于隔膜毂的方法,其中,该隔膜部件具有柱状主体部和呈环状设置于该柱状主体部的外周的薄壁弯曲部,在所述柱状主体部的安装表面侧设置有小径凹部,在该小径凹部的里侧还设置有大径凹部,该隔膜毂具有:轴部,其能够与所述小径凹部嵌合;以及扩径部,其与所述轴部连接且能够与所述大径凹部嵌合,其特征在于,该方法具有如下的工序:(1)以使所述轴部和所述扩径部向上方侧露出的方式对所述隔膜毂进行固定;(2)使用具有空气吸引部的机器人臂装置,以使所述小径凹部和所述大径凹部向下方侧露出的方式利用空气吸引力对所述隔膜部件进行把持;(3)在所述工序(1)和所述工序(2)之后,对所述机器人臂装置进行控制,使所述隔膜部件的所述柱状主体部的轴线相对于所述隔膜毂的所述轴部的轴线倾斜,并且使所述隔膜部件的所述小径凹部和/或所述大径凹部与所述隔膜毂的所述扩径部接触;以及(4)在所述工序(3)之后,对所述机器人臂装置进行控制,使所述隔膜部件的所述小径凹部和/或所述大径凹部绕所述隔膜毂的所述轴部的轴线进行转动,并且将所述隔膜部件的所述小径凹部和/或所述大径凹部向所述隔膜毂按压,使所述扩径部与所述大径凹部嵌合并且使所述轴部与所述小径凹部嵌合。
20.根据本发明,通过利用空气吸引力来把持隔膜部件,能够避免不期望的变形并且可靠地把持隔膜部件,此外,使隔膜部件的柱状主体部的轴线相对于隔膜毂的轴部的轴线倾斜,并且使隔膜部件的小径凹部和/或大径凹部与隔膜毂的扩径部接触,然后使隔膜部件的小径凹部和/或大径凹部绕隔膜毂的轴部的轴线进行转动,并且将隔膜部件的小径凹部和/或大径凹部向隔膜毂按压,由此能够在更可靠地避免隔膜部件的不期望的变形的同时,使扩径部与大径凹部嵌合并且使轴部与小径凹部嵌合。
21.在本发明中,优选还具有如下的工序(5):在所述工序(4)之后,对所述机器人臂装置进行控制,在使所述隔膜部件的所述柱状主体部的轴线与所述隔膜毂的所述轴部的轴线一致的状态下,使所述隔膜部件绕该轴线往复转动。
22.根据工序(5),能够使扩径部的与轴部相反的一侧的面与大径凹部的里侧的面牢固地紧贴,从而能够使隔膜部件与隔膜毂的结合更牢固。
23.在该情况下,优选还具有如下的工序(6):在所述工序(5)之后,对所述机器人臂装置进行控制,再次使所述隔膜部件的所述柱状主体部的轴线相对于所述隔膜毂的所述轴部的轴线倾斜,一边维持该倾斜的角度(在该圆锥面内),一边使所述隔膜部件绕所述隔膜毂的所述轴部的轴线进行转动。
24.根据工序(6),在基于工序(4)和工序(5)的嵌合作业未充分地发挥功能的情况下等,能够更可靠地使扩径部与大径凹部嵌合并且使轴部与小径凹部嵌合。
25.在该情况下,优选还具有如下的工序(7):在所述工序(6)之后,对所述机器人臂装置进行控制,在再次使所述隔膜部件的所述柱状主体部的轴线与所述隔膜毂的所述轴部的
轴线一致的状态下,使所述隔膜部件绕该轴线往复转动。
26.根据工序(7),能够使扩径部的与轴部相反的一侧的面与大径凹部的里侧的面牢固地紧贴,从而能够使隔膜部件与隔膜毂的结合更牢固(与工序(5)大致相同的效果)。
27.另外,优选的是,所述隔膜部件在与所述安装表面侧相反的一侧具有阀密封面,所述空气吸引部在不与所述阀密封面接触的情况下对所述隔膜部件进行把持。
28.在该情况下,能够更可靠地将在电磁阀的性能中重要的阀密封面维持为隔膜部件的精加工后的状态。
29.或者,本发明是一种机器人臂装置,其用于将隔膜部件安装于隔膜毂,其中,该隔膜部件具有柱状主体部和呈环状设置于该柱状主体部的外周的薄壁弯曲部,在所述柱状主体部的安装表面侧设置有小径凹部,在该小径凹部的里侧还设置有大径凹部,该隔膜毂具有:轴部,其能够与所述小径凹部嵌合;以及扩径部,其与所述轴部连接且能够与所述大径凹部嵌合,其特征在于,该机器人臂装置具有:空气吸引部,其能够以使所述小径凹部和所述大径凹部露出的方式利用空气吸引力对所述隔膜部件进行把持;机器人臂机构,其与所述空气吸引部连接,变更该空气吸引部的位置和姿势;以及控制部,其对所述机器人臂机构进行控制,所述控制部能够实施如下的工序:(3)对所述机器人臂机构进行控制,使所述隔膜部件的所述柱状主体部的轴线相对于所述隔膜毂的所述轴部的轴线倾斜,并且使所述隔膜部件的所述小径凹部和/或所述大径凹部与所述隔膜毂的所述扩径部接触;以及(4)在所述工序(3)之后,对所述机器人臂机构进行控制,使所述隔膜部件的所述小径凹部和/或所述大径凹部绕所述隔膜毂的所述轴部的轴线进行转动,并且将所述隔膜部件的所述小径凹部和/或所述大径凹部向所述隔膜毂按压,使所述扩径部与所述大径凹部嵌合并且使所述轴部与所述小径凹部嵌合。
30.根据本发明,通过利用空气吸引力来把持隔膜部件,能够避免不期望的变形并且可靠地把持隔膜部件,此外,使隔膜部件的柱状主体部的轴线相对于隔膜毂的轴部的轴线倾斜,并且使隔膜部件的小径凹部和/或大径凹部与隔膜毂的扩径部接触,然后使隔膜部件的小径凹部和/或大径凹部绕隔膜毂的轴部的轴线进行转动,并且将隔膜部件的小径凹部和/或大径凹部向隔膜毂按压,由此能够在更可靠地避免隔膜部件的不期望的变形的同时,使扩径部与大径凹部嵌合并且使轴部与小径凹部嵌合。
31.在本发明中,优选的是,所述控制部还能够实施如下的工序(5):在所述工序(4)之后,对所述机器人臂机构进行控制,在使所述隔膜部件的所述柱状主体部的轴线与所述隔膜毂的所述轴部的轴线一致的状态下,使所述隔膜部件绕该轴线往复转动。
32.根据工序(5),能够使扩径部的与轴部相反的一侧的面与大径凹部的里侧的面牢固地紧贴,从而能够使隔膜部件与隔膜毂的结合更牢固。
33.在该情况下,优选的是,所述控制部还能够实施如下的工序(6):在所述工序(5)之后,对所述机器人臂机构进行控制,再次使所述隔膜部件的所述柱状主体部的轴线相对于所述隔膜毂的所述轴部的轴线倾斜,一边维持该倾斜的角度,一边使所述隔膜部件绕所述隔膜毂的所述轴部的轴线进行转动。
34.根据工序(6),在基于工序(4)和工序(5)的嵌合作业未充分地发挥功能的情况下等,能够更可靠地使扩径部与大径凹部嵌合并且使轴部与小径凹部嵌合。
35.在该情况下,优选的是,所述控制部还具有如下的工序(7):在所述工序(6)之后,
对所述机器人臂机构进行控制,在再次使所述隔膜部件的所述柱状主体部的轴线与所述隔膜毂的所述轴部的轴线一致的状态下,使所述隔膜部件绕该轴线往复转动。
36.根据工序(7),能够使扩径部的与轴部相反的一侧的面与大径凹部的里侧的面牢固地紧贴,从而能够使隔膜部件与隔膜毂的结合更牢固(与工序(5)大致相同的效果)。
37.另外,优选的是,所述隔膜部件在与所述安装表面侧相反的一侧具有阀密封面,所述空气吸引部能够在不与所述阀密封面接触的情况下对所述隔膜部件进行把持。
38.在该情况下,能够更可靠地将电磁阀的性能中重要的阀密封面维持为隔膜部件的精加工后的状态。
39.另外,优选的是,所述空气吸引部能够在不与所述扩径部的与所述轴部相反的一侧的面接触的情况下对所述隔膜毂进行把持。
40.在该情况下,能够更可靠地将在隔膜部件与隔膜毂的牢固的结合中重要的隔膜毂的扩径部的与轴部相反的一侧的面维持为隔膜毂的精加工后的状态。
41.或者,本发明是一种机器人臂装置,其用于将隔膜部件安装于隔膜毂,其中,该隔膜部件具有柱状主体部和呈环状设置于该柱状主体部的外周的薄壁弯曲部,在所述柱状主体部的安装表面侧设置有小径凹部,在该小径凹部的里侧还设置有大径凹部,该隔膜毂具有:轴部,其能够与所述小径凹部嵌合;以及扩径部,其与所述轴部连接且能够与所述大径凹部嵌合,其特征在于,该机器人臂装置具有:空气吸引部,其能够以使所述小径凹部和所述大径凹部露出的方式利用空气吸引力对所述隔膜部件进行把持;机器人臂机构,其与所述空气吸引部连接,变更该空气吸引部的位置和姿势;以及控制部,其对所述机器人臂机构进行控制,所述空气吸引部具有经由台阶而在高度方向上连续的下方大径孔和上方小径孔,在所述柱状主体部收纳于所述下方大径孔内的状态下,所述隔膜部件被所述空气吸引力把持,所述隔膜部件在被所述空气吸引力把持的状态下与所述台阶抵接。
42.根据本发明,通过利用空气吸引力来把持隔膜部件,能够避免不期望的变形并且可靠地把持隔膜部件,此外,能够利用台阶将按压力应用于隔膜部件,因此能够在更可靠地避免隔膜部件的不期望的变形的同时,使扩径部与大径凹部嵌合并且使轴部与小径凹部嵌合。
43.发明效果
44.根据本发明,通过利用空气吸引力来把持隔膜部件,能够避免不期望的变形并且可靠地把持隔膜部件,此外,使隔膜部件的柱状主体部的轴线相对于隔膜毂的轴部的轴线倾斜,并且使隔膜部件的小径凹部和/或大径凹部与隔膜毂的扩径部接触,然后使隔膜部件的小径凹部和/或大径凹部绕隔膜毂的轴部的轴线进行转动,并且将隔膜部件的小径凹部和/或大径凹部向隔膜毂按压,由此能够在更可靠地避免隔膜部件的不期望的变形的同时,使扩径部与大径凹部嵌合并且使轴部与小径凹部嵌合。
45.或者,根据本发明,通过利用空气吸引力来把持隔膜部件,能够避免不期望的变形并且可靠地把持隔膜部件,此外,能够利用台阶将按压力应用于隔膜部件,因此能够在更可靠地避免隔膜部件的不期望的变形的同时,使扩径部与大径凹部嵌合并且使轴部与小径凹部嵌合。
附图说明
46.图1是本发明的一个实施方式的机器人臂装置的概略图。
47.图2是隔膜部件的一例的剖视图。
48.图3是作为移动芯的一部分的隔膜毂的一例的剖视图。
49.图4是压盖的一例的剖视图。
50.图5是图1的机器人臂装置的空气吸引部的概略图。
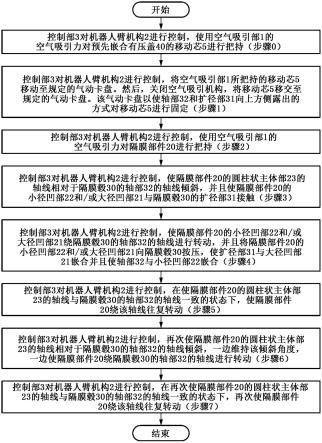
51.图6是示出本发明的一个实施方式的方法的流程图。
52.图7是示出空气吸引部对包含隔膜毂的移动芯进行把持的状态的概略图。
53.图8是示出空气吸引部对隔膜部件进行把持的状态的概略图。
54.图9是示出与隔膜毂嵌合的隔膜部件的概略图。
55.图10是隔膜式电磁阀的概略剖视图。
具体实施方式
56.以下,参照附图对本发明的实施方式进行说明。
57.图1是本发明的一个实施方式的机器人臂装置的概略图,图2是隔膜部件的一例的剖视图,图3是作为移动芯的一部分的隔膜毂的一例的剖视图,图4是压盖的一例的剖视图,图5是图1的机器人臂装置的空气吸引部的概略图。
58.如图1所示,本实施方式的机器人臂装置10具有:空气吸引部1,其能够利用空气吸引力来把持隔膜部件20等;机器人臂机构2,其与空气吸引部1连接,变更该空气吸引部1的位置和姿势;以及控制部3,其对机器人臂机构2进行控制。
59.如图2所示,本实施方式的隔膜部件20具有:圆柱状主体部(柱状主体部的一例)23;薄壁弯曲部24,其呈环状设置于该圆柱状主体部23的外周;以及厚壁外周部25,其呈环状设置于薄壁弯曲部24的更外侧。隔膜部件20的材料例如是橡胶(氟橡胶等)。
60.在圆柱状主体部23的与作为移动芯5的一部分的隔膜毂30相对的安装表面侧设置有小径凹部22,在该小径凹部22的里侧还设置有大径凹部21。另外,圆柱状主体部23的与安装表面侧相反的一侧的面被精加工为阀密封面26。
61.本实施方式的圆柱状主体部23的高度为4.5mm、直径为6mm,薄壁弯曲部24的外径为14.4mm,薄壁弯曲部24的厚度(高度)大致为0.5mm,厚壁外周部25的外径为18.3mm。
62.另外,本实施方式的小径凹部22的高度为1mm、直径为3mm,大径凹部21的高度为2mm、直径为5mm。
63.接着,如图3所示,本实施方式的隔膜毂30是移动芯5的一部分,其具有:轴部32,其能够与小径凹部22嵌合;以及扩径部31,其与该轴部32连接且能够与大径凹部21嵌合。隔膜毂30的材料例如是磁性材料(电磁不锈钢等)。
64.本实施方式的轴部32的长度(高度)为3mm、直径为3mm,设置有识别用的v字槽。另外,本实施方式的扩径部31的高度为2mm、直径为5.1mm(大径凹部21通过发生弹性变形而嵌合)。
65.此外,在本实施方式中,也使用图4所示的被称为压盖40的环状部件。本实施方式的压盖40的外径为18.4mm、内径为8.4mm,下方垂下部41的长度(高度)为2.4mm、外径为13mm、内径为11.8mm,除去下方垂下部41后的压盖40的高度为2.55mm。
66.另一方面,如图5所示,本实施方式的空气吸引部1具有经由台阶1s而在高度方向上连续的下方大径孔1a和上方小径孔1b。上方小径孔1b还经由纵孔1c和横孔1d而与未图示的空气吸引机构连接。通过该空气吸引机构的作用,空气吸引部1能够通过负压对被收纳于下方大径孔1a和/或上方小径孔1b的物体进行把持。为了避免损伤把持对象物,空气吸引部1的材料例如采用硬质树脂(尼龙等)。
67.本实施方式的下方大径孔1a的长度(高度)为2.4mm、直径为6.2mm,本实施方式的上方小径孔1b的长度(高度)为2.8mm、直径为5.2mm。
68.接着,图6是示出本发明的一个实施方式的方法的流程图,图7是示出空气吸引部1对包含隔膜毂30的移动芯5进行把持的状态的概略图,图8是示出空气吸引部1对隔膜部件20进行把持的状态的概略图,图9是示出与隔膜毂30嵌合的隔膜部件20的概略图。
69.在本实施方式中,控制部3对机器人臂机构2进行控制,使用空气吸引部1的空气吸引力来对预先嵌合有压盖40的移动芯5进行把持(步骤0)。
70.此时,如图7所示,扩径部31大致收纳于上方小径孔1b内,空气吸引机构所带来的负压有效地作为把持力发挥作用。
71.另外,此时,空气吸引部1在不与扩径部31的与轴部32相反的一侧的面接触的情况下对包含隔膜毂30的移动芯5进行把持。由此,能够将该面维持为隔膜毂30的精加工后的状态。因此,能够更有效地实现隔膜部件20与隔膜毂30的牢固的结合。
72.接着,在本实施方式中,控制部3对机器人臂机构2进行控制,使包含空气吸引部1所把持的隔膜毂30的移动芯5移动至规定的气动卡盘(未图示)。然后,关闭空气吸引机构,将移动芯5移交至规定的气动卡盘。该气动卡盘以使轴部32和扩径部31向上方侧露出的方式对移动芯5进行固定(步骤1)。
73.接着,在本实施方式中,控制部3对机器人臂机构2进行控制,使用空气吸引部1的空气吸引力来把持隔膜部件20(步骤2)。
74.此时,如图8所示,圆柱状主体部123大致收纳于下方大径孔1a内,空气吸引机构所带来的负压有效地作为把持力发挥作用。
75.另外,此时,空气吸引部1在不与阀密封面26接触的情况下把持隔膜部件20。由此,能够将该面维持为隔膜部件20的精加工后的状态。因此,能够更可靠地实现作为隔膜阀的期望的性能。
76.接着,在本实施方式中,控制部3对机器人臂机构2进行控制,使隔膜部件20的圆柱状主体部23的轴线相对于隔膜毂30的轴部32的轴线倾斜(例如倾斜角度为10
°
~30
°
,优选倾斜角度为20
°
),并且使隔膜部件20的小径凹部22和/或大径凹部21与隔膜毂30的扩径部31接触(步骤3)。
77.接着,控制部3对机器人臂机构2进行控制,使隔膜部件20的小径凹部22和/或大径凹部21绕隔膜毂30的轴部32的轴线进行转动,并且将隔膜部件20的小径凹部22和/或大径凹部21向隔膜毂30按压(具体而言,例如使倾斜角度逐渐变小(例如在旋转3或4周左右的期间使倾斜角度为0
°
)),使扩径部31与大径凹部21嵌合,并且使轴部32与小径凹部22嵌合(步骤4)。按压前进时的力从台阶1s向隔膜部件20施加。
78.另外,在本实施方式的步骤4中,采用空气吸引部1的位置控制,不进行载荷反馈控制。
79.在本实施方式中,再接下来,控制部3对机器人臂机构2进行控制,在使隔膜部件20的圆柱状主体部23的轴线与隔膜毂30的轴部32的轴线一致的状态下(倾斜角度为0
°
的状态下),使隔膜部件20绕该轴线往复转动(步骤5)。往复转动例如交替地进行顺时针大致半周旋转、逆时针大致半周旋转、顺时针大致半周旋转、逆时针大致半周旋转、顺时针大致半周旋转、逆时针大致半周旋转、顺时针大致半周旋转、逆时针大致半周旋转、顺时针大致半周旋转、逆时针大致半周旋转这共计10个半周旋转。
80.这里,在本实施方式的步骤5中,进行载荷反馈控制,将从台阶1s向隔膜部件20施加的力维持为规定的值(例如20n~30n,优选为25n)。
81.在本实施方式中,再接下来,控制部3对机器人臂机构2进行控制,再次使隔膜部件20的圆柱状主体部23的轴线相对于隔膜毂30的轴部32的轴线倾斜(例如倾斜角度为10
°
~30
°
,优选倾斜角度为20
°
),一边维持该倾斜的角度,一边使隔膜部件20(在这样的圆锥面内)绕隔膜毂30的轴部32的轴线进行转动(步骤6)。该转动例如进行顺时针大致5周左右旋转。
82.这里,在本实施方式的步骤6中,也进行载荷反馈控制,将从台阶1s向隔膜部件20施加的力维持为规定的值(例如10n~30n,优选为20n)。
83.在本实施方式中,再接下来,控制部3对机器人臂机构2进行控制,在再次使隔膜部件20的圆柱状主体部23的轴线与隔膜毂30的轴部32的轴线一致的状态下(使倾斜角度回到0
°
),再次使隔膜部件20绕该轴线往复转动(步骤7)。往复转动例如交替地进行顺时针大致半周旋转、逆时针大致半周旋转、顺时针大致半周旋转、逆时针大致半周旋转、顺时针大致半周旋转、逆时针大致半周旋转这共计6个半周旋转。
84.这里,在本实施方式的步骤7中,也进行载荷反馈控制,将从台阶1s向隔膜部件20施加的力维持为规定的值(例如20n~30n,优选为25n)。
85.在图9中示出如以上那样彼此嵌合的隔膜部件20和隔膜毂30。
86.根据以上那样的本实施方式的机器人臂装置10,通过利用空气吸引力来把持隔膜部件20,能够避免不期望的变形并且可靠地把持隔膜部件20。
87.此外,根据以上那样的本实施方式的机器人臂装置10,使隔膜部件20的圆柱状主体部23的轴线相对于隔膜毂30的轴部32的轴线倾斜,并且使隔膜部件20的小径凹部22和/或大径凹部21与隔膜毂30的扩径部31接触,然后使隔膜部件20的小径凹部22和/或大径凹部21绕隔膜毂30的轴部32的轴线进行转动,并且将隔膜部件20的小径凹部22和/或大径凹部21向隔膜毂30按压(步骤4),由此能够在更可靠地避免隔膜部件20的不期望的变形的同时,使扩径部31与大径凹部21嵌合并且使轴部32与小径凹部22嵌合。
88.另外,根据以上那样的本实施方式的机器人臂装置10,在步骤4之后,实施如下的步骤5:在使隔膜部件20的圆柱状主体部23的轴线与隔膜毂30的轴部32的轴线一致的状态下,使隔膜部件20绕该轴线往复转动。由此,能够使扩径部31的与轴部32相反的一侧的面与大径凹部21的里侧的面牢固地紧贴,能够使隔膜部件20与隔膜毂30的结合更牢固。
89.另外,根据以上那样的本实施方式的机器人臂装置10,在步骤5之后,实施如下的步骤6:再次使隔膜部件20的圆柱状主体部23的轴线相对于隔膜毂30的轴部32的轴线倾斜,一边维持该倾斜的角度一边使隔膜部件20绕隔膜毂30的轴部32的轴线进行转动。由此,在基于步骤4和步骤5的嵌合作业未充分地发挥功能的情况下等,能够更可靠地使扩径部31与
大径凹部21嵌合并且使轴部32与小径凹部22嵌合。
90.另外,根据以上那样的本实施方式的机器人臂装置10,在步骤6之后,实施如下的步骤7:在再次使隔膜部件20的圆柱状主体部23的轴线与隔膜毂30的轴部32的轴线一致的状态下,使隔膜部件20绕该轴线往复转动。由此,能够使扩径部31的与轴部32相反的一侧的面与大径凹部21的里侧的面牢固地紧贴,从而能够使隔膜部件20与隔膜毂30的结合更牢固(与步骤5大致相同的效果)。
91.另外,根据以上那样的本实施方式的机器人臂装置10,空气吸引部1能够在不与阀密封面26接触的情况下把持隔膜部件20。由此,能够更可靠地将在电磁阀的性能中重要的阀密封面26维持为隔膜部件20的精加工后的状态。
92.另外,根据以上那样的本实施方式的机器人臂装置10,空气吸引部1能够在不与扩径部31的与轴部32相反的一侧的面接触的情况下把持隔膜毂30(包含隔膜毂30的移动芯5)。由此,能够更可靠地将在隔膜部件20与隔膜毂30的牢固结合中重要的隔膜毂30的扩径部31的与轴部32相反的一侧的面维持为隔膜毂30的精加工后的状态。
93.另外,根据以上那样的本实施方式的机器人臂装置10,能够利用台阶1s来对隔膜部件20施加按压力,因此能够在更可靠地避免隔膜部件20的不期望的变形的同时,使扩径部31与大径凹部21嵌合并且使轴部32与小径凹部22嵌合。
94.标号说明
95.1:空气吸引部;1a:下方大径孔;1b:上方小径孔;1c:纵孔;1d:横孔;1s:台阶;2:机器人臂机构;3:控制部;5:移动芯;10:机器人臂装置;20:隔膜部件;21:大径凹部;22:小径凹部;23:圆柱状主体部;24:薄壁弯曲部;25:厚壁外周部;26:阀密封面;30:作为移动芯的一部分的隔膜毂;31:扩径部;32:轴部;40:压盖;41:下方垂下部;110:电磁阀主体部;110a:流路;110b:流路;112:隔膜落座面;120:隔膜部件;121:大径凹部;122:小径凹部;123:圆柱状主体部;124:薄壁弯曲部;125:厚壁外周部;130:作为移动芯的一部分的隔膜毂;131:扩径部;132:轴部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1