一种焊接机器人的视觉焊缝跟踪系统的制作方法
1.本发明涉及焊接机器人技术领域,特别是涉及一种焊接机器人的视觉焊缝跟踪系统。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。
3.现有技术中,焊接机器人的焊接路径是根据预先设定好的路径进行行走焊接的,工作人员必须针对不同的焊接工件编辑不同的焊接路径函数,输入到焊接机器人中,所以我们发明一种焊接机器人的视觉焊缝跟踪系统。
技术实现要素:
4.为了解决焊接机器人的焊接路径是根据预先设定好的路径进行行走焊接的,工作人员必须针对不同的焊接工件编辑不同的焊接路径函数,输入到焊接机器人中的问题,本发明的目的是提供一种焊接机器人的视觉焊缝跟踪系统。
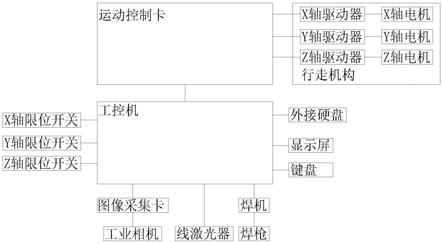
5.为了实现上述目的,本发明采用如下技术方案:一种焊接机器人的视觉焊缝跟踪系统,包括有工控机,所述工控机用于数据的综合处理,所述工控机连接有运动控制卡,用于输出高频脉冲,控制伺服电机的运行,所述运动控制卡连接有行走机构,用于控制行走机构的运动方向;
6.所述工控机还连接有图像采集卡,用于对图像采集卡输入的图像数据进行图像处理,所述图像采集卡连接有工业相机,用于通过工业相机采集激光图像,所述工控机还连接有线激光器,用于控制激光器的投射;
7.所述工控机还连接有焊机,用于控制焊机的运行,所述焊机连通有与焊枪,用于控制焊枪进行焊接工作;
8.所述工控机还连接有显示屏,用于显示控制软件界面以及控制信息,以及显示图像画面,所述工控机还连接有键盘,用于编辑以及发送控制信息,所述工控机连接有外接硬盘,用于输入运动控制卡库函数。
9.优选的,所述行走机构包括有与运动控制卡连接的x轴驱动器,用于启动x轴驱动器,所述x轴驱动器连接有x轴电机,用于驱动x轴电机的运行,以使得行走机构的传动端在x轴方向上移动。
10.优选的,所述行走机构包括有与运动控制卡连接的y轴驱动器,用于启动y轴驱动器,所述y轴驱动器连接有y轴电机,用于驱动y轴电机的运行,以使得行走机构的传动端在y轴方向上移动。
11.优选的,所述行走机构包括有与运动控制卡连接的z轴驱动器,用于启动z轴驱动
器,所述z轴驱动器连接有z轴电机,用于驱动z轴电机的运行,以使得行走机构的传动端在z轴方向上移动。
12.优选的,所述行走机构的x轴两端安装有与运动控制卡连接的两个x轴限位开关,以及y轴两端安装有与运动控制卡连接的两个y轴限位开关,以及z轴两端安装有与运动控制卡连接的两个z轴限位开关,用于对行走机构在x、y、z方向上进行安全行程限位。
13.优选的,所述线激光器、工业相机和焊枪均安装在行走机构的传动端。
14.优选的,所述工业相机采用ccd照相机,镜头上安装有滤波片,用于过滤弧焊光和外界干扰光。
15.优选的,所述视线激光器发射出点状激光源,经柱状镜形成条形光照射到焊接件表面﹐激光线条在角接焊缝或搭接焊缝的坡口处会出现相应的形变,然后工件上的条形激光漫反射到工业相机里,即可清晰的获取在工件表面上激光的形状。
16.与现有技术相比,本发明实现的有益效果:视线激光器发射出点状激光源,经柱状镜形成条形光照射到焊接件表面﹐激光线条在角接焊缝或搭接焊缝的坡口处会出现相应的形变,然后工件上的条形激光漫反射到工业相机里,即可清晰的获取在工件表面上激光的形状,图像采集卡将图像数据传输至运动控制卡中,运动控制卡对图像进行图像滤波、二值化、轮廓提取、中心线提取,得到了清晰的焊缝图像后,再经坐标转换将图像坐标转化为平台坐标,算出焊缝中心点与焊枪中心点的偏差值,最后将偏差值传给行走机构,调整焊枪的位置,实现焊缝的实时跟踪。
附图说明
17.以下结合附图和具体实施方式来进一步详细说明本发明:
18.图1为本发明的整体的结构示意图。
具体实施方式
19.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
20.请参阅图1。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
21.本发明提供一种技术方案:一种焊接机器人的视觉焊缝跟踪系统,包括有工控机,所述工控机用于数据的综合处理,所述工控机连接有运动控制卡,用于输出高频脉冲,控制伺服电机的运行,所述运动控制卡连接有行走机构,用于控制行走机构的运动方向;
22.所述工控机还连接有图像采集卡,用于对图像采集卡输入的图像数据进行图像处理,所述图像采集卡连接有工业相机,用于通过工业相机采集激光图像,所述工控机还连接有线激光器,用于控制激光器的投射;
23.所述工控机还连接有焊机,用于控制焊机的运行,所述焊机连通有与焊枪,用于控制焊枪进行焊接工作;
24.所述工控机还连接有显示屏,用于显示控制软件界面以及控制信息,以及显示图像画面,所述工控机还连接有键盘,用于编辑以及发送控制信息,所述工控机连接有外接硬盘,用于输入运动控制卡库函数。
25.所述行走机构包括有与运动控制卡连接的x轴驱动器,用于启动x轴驱动器,所述x轴驱动器连接有x轴电机,用于驱动x轴电机的运行,以使得行走机构的传动端在x轴方向上移动。
26.所述行走机构包括有与运动控制卡连接的y轴驱动器,用于启动y轴驱动器,所述y轴驱动器连接有y轴电机,用于驱动y轴电机的运行,以使得行走机构的传动端在y轴方向上移动。
27.所述行走机构包括有与运动控制卡连接的z轴驱动器,用于启动z轴驱动器,所述z轴驱动器连接有z轴电机,用于驱动z轴电机的运行,以使得行走机构的传动端在z轴方向上移动。
28.所述行走机构的x轴两端安装有与运动控制卡连接的两个x轴限位开关,以及y轴两端安装有与运动控制卡连接的两个y轴限位开关,以及z轴两端安装有与运动控制卡连接的两个z轴限位开关,用于对行走机构在x、y、z方向上进行安全行程限位。
29.所述线激光器、工业相机和焊枪均安装在行走机构的传动端。
30.所述工业相机采用ccd照相机,镜头上安装有滤波片,用于过滤弧焊光和外界干扰光。
31.所述视线激光器发射出点状激光源,经柱状镜形成条形光照射到焊接件表面﹐激光线条在角接焊缝或搭接焊缝的坡口处会出现相应的形变,然后工件上的条形激光漫反射到工业相机里,即可清晰的获取在工件表面上激光的形状。
32.使用时,视线激光器发射出点状激光源,经柱状镜形成条形光照射到焊接件表面﹐激光线条在角接焊缝或搭接焊缝的坡口处会出现相应的形变,然后工件上的条形激光漫反射到工业相机里,即可清晰的获取在工件表面上激光的形状,图像采集卡将图像数据传输至运动控制卡中,运动控制卡对图像进行图像滤波、二值化、轮廓提取、中心线提取,得到了清晰的焊缝图像后,再经坐标转换将图像坐标转化为平台坐标,算出焊缝中心点与焊枪中心点的偏差值,最后将偏差值传给行走机构,调整焊枪的位置,实现焊缝的实时跟踪。
33.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1