深盲孔壳体脉冲电流辅助局部镦锻连续成形方法与装置
1.本发明涉及材料加工技术领域中一种装置及方法,具体是一种深盲孔壳体脉冲电流辅助局部镦锻连续成形装置。
背景技术:
2.目前,国内外超高强钢深盲孔壳体的主流制造方法主要包括:
3.(1)锻坯切削加工。先采用多道次镦拔制造锻棒,在采用直接机械加工出深盲孔结构,存在制造周期长(通常大于3天)、材料利用率低(利用率低于30%)、构件强韧性差等问题;且内孔存在刀痕;
4.(2)分段塑性成形+焊接。首先分别热挤压成形管坯件和盲孔件,然后焊接组装成深盲孔结构,但焊缝与基体存在强度差异,且残余应力较大,易出现变形、气孔、夹渣、裂纹等缺陷。
5.(3)多道次局部加载成形,首先热挤压成形内孔深径比≤3的盲孔坯,然后多道次拔伸实现深盲孔壳体整体成形,但难以成形成性一体化制造:一是拔伸道次少、单次变形量大时,剪切变形严重,易出现拉裂、拉断等缺陷;二是多道次拔伸流程过长,预制坯重复加热,导致锻件晶粒粗大、强韧性降低;三是多道次成形过程的累积变形量由挤压预制坯和终锻坯的壁厚变化率决定,变形量固定且有限,其变形强化效果在预制坯多次整体重复加热后消耗严重,多道次径向锻造等方法亦存在这几类问题。可见,现有技术无法满足高强度深盲孔壳体整体成形制造需求,急需发展新的深盲孔壳体成形制造理论及方法。
技术实现要素:
6.本发明提供深盲孔壳体脉冲电流辅助局部镦锻连续成形方法与装置与装置。
7.其技术原理是采用热挤压成形的盲孔件(内孔深径比≤3)作为预制坯,通过两组径向位置梯次递进的旋转锻造锤头对壁部预制坯进行局部高频脉冲镦锻加载,依靠预制坯侧壁的径向减薄和轴向伸长而成形深盲孔构件。“锻”为锤头沿预制坯径向加载,单组锤头作用的变形区可视为沿轴向拔长,“镦”为两组锤头之间的预制坯由于轴向流动受阻而发生的轴向镦粗变形;预制坯变形区为“拔长
‑
镦粗
‑
拔长”复合的剧烈塑性变形,可有效提升累积变形量,细化微观组织,提高单道次径向压缩/轴向延伸效率,且在剧烈塑性变形过程中变形区晶粒易于形成沿管壁轴向的织构,进一步提升壳体服役承载方向力学性能;同时利用夹持电极与滑动电极对预制坯镦锻变形区在线施加脉冲大电流,利用电塑性效应降低材料变形抗力、提高成形性,而且难变形的薄壁处相对电流密度大,电致塑性效果更好,有利于薄壁处成形;通过推料杆使预制坯轴向进给,并且芯棒随动,局部镦锻变形区从壳体口部向底部顺序转移,进而实现超深盲孔壳体构件连续成形。
8.同时发明还运用到一种设计专用的旋转锻造机作为成形设备,采用伺服电机作为驱动装置带动成形装置转动,采用两组径向位置梯次递进的第一组锤头和第二组锤头与匹配实现对预制坯的高频脉冲径向加载。第一组锤头的内部孔径大于第二组锤头的内部孔
径,加载时第一组锤头实现预制坯的第一次减薄,第一组锤头入口部分为第一入口扩口锥面,第一入口扩口锥面用以确保预制坯送进的准确性和稳定性,同时第一入口扩口锥面与径向加载工作面之间设有一定大小的第一过渡圆角,第一组锤头出口部分还包括第一出口扩口锥面;第二组锤头入口部分为第二入口扩口锥面,第二入口扩口锥面与径向加载工作面之间设有一定大小的第二过渡圆角,第二组锤头出口部分还包括第二出口扩口锥面;预制坯经过第一组锤头拔长后的流动到第二组锤头处被继续拔长,过程中,有一部分预制坯沿轴向向前流动,有一部分预制坯受到第二组锤头入口锥面的阻碍而在第一组锤头和第二组锤头之间堆积,形成局部镦粗变形区。
9.锤头的径向高频脉冲加载是通过轴承和锤头撞块的相互作用实现的。锤头撞块上部为弧形面,撞块和锤头受弹簧拉力而保持在不加载的工作位置,在主轴转动过程中,撞块弧面转动到轴承滚子处时沿径向向内运动,撞击锤头而实现加载;当撞块弧形面转动至滚子轴承间隙处时,撞块回复到不加载的工作位置。由于锤头撞块与锤头之间发生高频冲击,优选的,可以在锤头撞块与锤头之间设置高强抗震橡胶垫进行缓冲。
10.在预制坯中设有芯棒,起到对预制坯的固定和导向作用,在连续进给过程中,芯棒随预制坯进给而向前运动;芯棒采用高温合金材料以确保工作状态下的刚度、强度和同轴度。
11.预制坯沿轴向的进给通过底部的推杆实现,推杆为高温合金材料,在成形过程中,预制坯入口和出口两端设置夹持电极,电极外部接入脉冲直流电源,电极闭合面开有半圆弧状接触面,闭合后能够在预制坯连续送进过程中与其保持接触而通电,同时对预制坯起到一定的导向作用。
12.本发明的实施例可以通过以下技术方案实现:
13.深盲孔壳体脉冲电流辅助局部镦锻连续成形方法与装置,深盲孔壳体脉冲电流辅助局部镦锻连续成形方法步骤如下:
14.深盲孔壳体脉冲电流辅助局部镦锻连续成形方法步骤如下:
15.步骤一、制作深盲孔预制坯:
16.通过热挤压成形将难变形金属材料制成内孔深径比小于等于3的预制坯;
17.步骤二、成形准备工作及装配工作:
18.成形装置包括芯棒、推杆、第一组锤头、第二组锤头、一个夹持电极正极和夹持电极负极,同时在芯棒外侧设有滑动电极负极,
19.在芯棒与预制坯接触的部分以及推杆与预制坯接触的部分均匀的喷涂石墨润滑乳,再将预制坯放置于成形装置内,此时,芯棒前端深入预制坯内盲孔底部,推杆顶住预制坯外侧底部,夹持电极正极夹持预制坯,滑动电极负极与入口端的预制坯接触;
20.步骤三、成形装置启动:
21.启动推杆及芯棒的进给装置,使得预制坯沿轴向向前以一定速率前进,且推杆及芯棒的轴向给进速率相同;
22.此时,预制坯先经过第一组锤头,后经过第二组锤头,当预制坯到达第一组锤头前,夹持电极正极和滑动电极负极接通产生脉冲辅助电流,变形区内的预制坯升温,接通夹持电极正极和滑动电极负极的同时,第一组锤头和第二组锤头在驱动装置的作用下开始高频脉冲径向加载;
23.步骤四、成形装置工作:
24.随预制坯的连续进给,预制坯在脉冲电流辅助作用下经过变形区,在第一组锤头和第二组锤头的高频锤击作用下预制坯发生塑性变形,随后继续从变形区流出,预制坯完成成形过程;
25.步骤五、得到深盲孔壳体锻件:
26.拆卸芯棒,将芯棒与变形后的预制坯分离,得到深盲孔壳体锻件。
27.优选的,步骤一中所述的难变形金属材料,包括铝合金、镁合金等轻合金材料、钢铁材料、钛合金等类似性质的材料。
28.优选的,步骤二中,所述成形装置包括控制推杆的推杆夹持卡盘,所述夹持卡盘通过电机和丝杠结构控制实现推杆的轴向运动,
29.所述成形装置还包括夹持芯棒的芯棒夹持卡盘,所述芯棒夹持卡盘也通过电机和丝杠结构控制实现芯棒的轴向运动。
30.优选的,步骤三中,推杆和芯棒的轴向进给速率均为5mm/s~20mm/s;
31.所述芯棒和所述推杆均采用高温合金材料。
32.优选的,步骤二中,第一组锤头和第二组锤头之间均为旋转锻造锤头,用于驱动第一组锤头和第二组锤头径向加载的轴承的滚子数为10个~50个、第一组锤头和第二组锤头的转速为50r/min~500r/min、锻打频率为300次/min~5000次/min、总行程为5mm~20mm,锤头的锻打速率为30mm/s~100mm/s。
33.优选的,步骤二中,所述夹持电极正极、夹持电极负极、所述滑动电极负极的脉冲电压为5v~30v,脉冲宽度为10μs~300μs。
34.所述芯棒、推杆、第一组锤头、第二组锤头的表面均进行绝缘处理。
35.深盲孔壳体脉冲电流辅助局部镦锻连续成形装置,所述成形装置包括芯棒、推杆、第一组锤头和第二组锤头,芯棒和推杆通过进给装置控制移动,第一组锤头和第二组锤头通过驱动装置控制。
36.成形装置在预制坯的入口端及出口端分别设置一个夹持电极正极和夹持电极负极,同时在芯棒外侧设有滑动电极负极,夹持电极正极和夹持电极负极之间为变形区,滑动电极负极与预制坯的顶端接触,夹持电极正极和夹持电极负极、滑动电极负极均与脉冲直流电源连接。
37.优选的,第一组锤头的内部孔径大于第二组锤头的内部孔径,第一组锤头实现预制坯的第一次减薄,第一组锤头入口部分为第一入口扩口锥面,第一组锤头出口部分还包括第一出口扩口锥面,同时第一入口扩口锥面和第一出口扩口锥面与径向加载工作面之间均设有一定大小的第一过渡圆角;
38.第二组锤头入口部分为第二入口扩口锥面,第二组锤头出口部分还包括第二出口扩口锥面,第二入口扩口锥面合同第二出口扩口锥面与径向加载工作面之间均设有一定大小的第二过渡圆角;
39.第一组锤头和第二组锤头均包括轴承和锤头撞块,锤头撞块上部为弧形面。
40.优选的,所述夹持电极正极和夹持电极负极包括半圆弧状接触面,所述夹持电极正极和夹持电极负极能够在预制坯连续送进过程中与其保持接触而通电;所述滑动电极负极的一端与预制坯接触,另一端设有弹性体,所述弹性体可以随预制坯的轴向移动被压缩。
41.本发明实施例提供的深盲孔壳体脉冲电流辅助局部镦锻连续成形方法与装置至少具有以下有益效果:
42.通过两组径向位置梯次递进的旋转锻造锤头对壁部预制坯进行局部高频脉冲镦锻加载,依靠预制坯侧壁的径向减薄和轴向伸长而成形深盲孔构件。预制坯变形区为“拔长
‑
镦粗
‑
拔长”复合的剧烈塑性变形,可有效提升累积变形量,细化微观组织,提高单道次径向压缩/轴向延伸效率,且在剧烈塑性变形过程中变形区晶粒易于形成沿管壁轴向的织构,进一步提升壳体服役承载方向力学性能;同时利用活动夹持电极与滑动过渡电极对预制坯镦锻变形区在线施加脉冲大电流,利用电塑性效应降低材料变形抗力、提高成形性,而且难变形的薄壁处相对电流密度大,电致塑性效果更好,有利于薄壁处成形;通过推料杆使预制坯轴向进给,并且芯棒随动,局部镦锻变形区从壳体口部向底部顺序转移,进而实现超深盲孔壳体构件连续成形。
附图说明
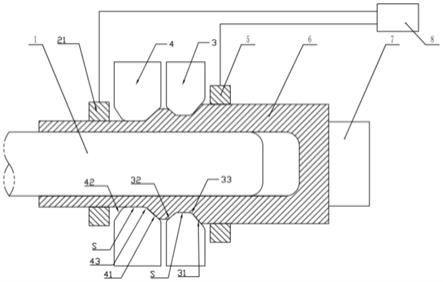
43.图1为本发明中深盲孔壳体脉冲电流辅助局部镦锻连续成形方法结构示意图;
44.图2为本发明中深盲孔壳体脉冲电流辅助局部镦锻连续成形方法结构某一状态示意图;
45.图3为本发明中深盲孔壳体脉冲电流辅助局部镦锻连续成形方法结构另一状态示意图;
46.图4为本发明中深盲孔壳体脉冲电流辅助局部镦锻连续成形结构的夹持电极负极/夹持电极正极夹持时示意图。
47.图中标号
48.芯棒1、夹持电极负极21、滑动电极负极22、弹性体23、第一组锤头3、第一入口扩口锥面31、第一出口扩口锥面32、第一过渡圆角33、第二组锤头4、第二入口扩口锥面41、第二出口扩口锥面42、第二过渡圆角43、夹持电极正极5、预制坯6、推杆7、脉冲直流电源8、半圆弧状接触面9、径向加载工作面s。
具体实施方式
49.以下,基于优选的实施方式并参照附图对本发明进行进一步说明。
50.此外,为了方便理解,放大(厚)或者缩小(薄)了图纸上的各种构件,但这种做法不是为了限制本发明的保护范围。
51.单数形式的词汇也包括复数含义,反之亦然。
52.在本发明实施例中的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,本发明的描述中,为了区分不同的单元,本说明书上用了第一、第二等词汇,但这些不会受到制造的顺序限制,也不能理解为指示或暗示相对重要性,其在发明的详细说明与权利要求书上,其名称可能会不同。
53.本说明书中词汇是为了说明本发明的实施例而使用的,但不是试图要限制本发
明。还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的技术人员而言,可以具体理解上述属于在本发明中的具体含义。
54.本实施例中,电机、丝杆均为本领域人员的惯常设计,驱动装置可以为驱动电机、伺服电机等常见的驱动装置,故本申请不再特意阐释。
55.下面结合附图说明本实施方式的主要步骤为:
56.步骤一、制作深盲孔预制坯6:通过热挤压成形将难变形金属材料制成内孔深径比小于等于3的预制坯6;
57.步骤二、成形准备工作及装配工作:
58.成形装置包括芯棒1、推杆7、第一组锤头3和第二组锤头4,芯棒1和推杆7通过进给装置控制移动,
59.成形装置在预制坯6的入口端及出口端分别设置一个夹持电极正极5和夹持电极负极21,同时在芯棒1外侧设有滑动电极负极22,夹持电极正极5和夹持电极负极21之间为变形区,滑动电极负极22与预制坯6的顶端接触,夹持电极正极和夹持电极负极、滑动电极负极均与脉冲直流电源8连接,
60.在芯棒1与预制坯6接触的部分以及推杆7与预制坯6接触的部分均匀的喷涂石墨润滑乳,再将预制坯6放置于成形装置内,此时,预制坯6固定在芯棒1上,推杆7顶住预制坯6底部,夹持电极正极5夹持预制坯6,滑动电极负极22与入口端的预制坯6接触;
61.步骤三、成形装置启动:
62.启动推杆7及芯棒1的进给装置,使得预制坯6沿轴向向前以一定速率前进,且推杆7及芯棒1的轴向给进速率相同;
63.此时,预制坯6先经过第一组锤头3,后经过第二组锤头4,当预制坯6到达第一组锤头3前,夹持电极正极5和滑动电极负极22接通产生脉冲辅助电流,变形区内的预制坯6升温,接通夹持电极正极5和滑动电极负极22的同时,第一组锤头3和第二组锤头4在驱动装置的作用下开始高频脉冲径向加载;
64.步骤四、成形装置工作:
65.随预制坯6的连续进给,预制坯6在脉冲电流辅助作用下经过变形区,在第一组锤头3和第二组锤头4的高频锤击作用下预制坯6发生塑性变形,随后继续从变形区流出,预制坯6完成成形过程;
66.步骤五、得到深盲孔壳体锻件:
67.拆卸芯棒1,将芯棒1与变形后的预制坯6分离,得到深盲孔壳体锻件。
68.具体的,优选的操作步骤如下:
69.步骤一、制作深盲孔预制坯6:
70.通过热挤压成形将难变形金属材料制成内孔深径比小于等于3的预制坯6。
71.所述的难变形金属材料,包括铝合金、镁合金等轻合金材料、钢铁材料、钛合金等类似性质的材料。
72.步骤二、成形准备工作及装配工作:
73.成形装置包括芯棒1、推杆7、第一组锤头3和第二组锤头4,芯棒1和推杆7通过进给
装置控制移动,
74.成形装置在预制坯6的入口端及出口端分别设置一个夹持电极正极5和夹持电极负极21,同时在芯棒1外侧设有滑动电极负极22,夹持电极正极5和夹持电极负极21之间为变形区,滑动电极负极22与预制坯6的顶端接触,
75.在芯棒1与预制坯6接触的部分以及推杆7与预制坯6接触的部分均匀的喷涂石墨润滑乳,再将预制坯6放置于成形装置内,此时,预制坯6固定在芯棒1上,推杆7顶住预制坯6底部,夹持电极正极5夹持预制坯6,滑动电极负极22与入口端的预制坯6接触。
76.本步骤中优选的,所述成形装置包括控制推杆7的推杆7夹持卡盘,所述夹持卡盘通过电机和丝杠结构控制实现推杆7的轴向运动。
77.本步骤中优选的,所述成形装置还包括夹持芯棒1的芯棒1夹持卡盘,所述芯棒1夹持卡盘也通过电机和丝杠结构控制实现芯棒1的轴向运动。
78.本步骤中优选的,推杆7和芯棒1的轴向进给速率均为5mm/s~20mm/s;所述芯棒1和所述推杆7均采用高温合金材料。
79.本步骤中优选的,第一组锤头3的内部孔径大于第二组锤头4的内部孔径,第一组锤头3实现预制坯6的第一次减薄,第一组锤头3入口部分为第一入口扩口锥面31,第一入口扩口锥面31与径向加载工作面s之间的斜度为10
°
~30
°
,第一入口扩口锥面31用以确保预制坯6送进的准确性和稳定性,第一组锤头3出口部分还包括第一出口扩口锥面32,第一出口扩口锥面32与径向加载工作面s之间的斜度为20
°
~60
°
。
80.同时第一入口扩口锥面31和第一出口扩口锥面32与径向加载工作面s之间均设有一定大小的第一过渡圆角33,第一过渡圆角33半径为5mm~20mm。
81.第二组锤头入口部分为第二入口扩口锥面41,第二入口扩口锥面41与径向加载工作面s之间的斜度为20
°
~60
°
,第二过渡圆角43第二组锤头4出口部分还包括第二出口扩口锥面42,第二出口扩口锥面42与径向加载工作面s之间的斜度为10
°
~30
°
。第二入口扩口锥面41和第二出口扩口锥面42与径向加载工作面s之间均设有一定大小的第二过渡圆角43,第二过渡圆角43半径为5mm~20mm。
82.预制坯6经过第一组锤头3拔长后的流动到第二组锤头4处被继续拔长,过程中,有一部分预制坯6沿轴向向前流动,有一部分预制坯6受到第二组锤头4入口锥面的阻碍而在第一组锤头3和第二组锤头4之间堆积,形成局部镦粗变形区。
83.本步骤中优选的,第一组锤头3和第二组锤头4之间均为旋转锻造锤头,第一组锤头3和第二组锤头4的滚子数为10~50、转速为50r/min~500r/min、锻打频率为300次/min~5000次/min、总行程为5mm~20mm,锤头的锻打速率为30mm/s~100mm/s。
84.所述滑动电极负极22的一端与预制坯6接触,另一端设有弹性体23,所述弹性体23可以随预制坯6的轴向移动被压缩。
85.本步骤中优选的,所述夹持电极正极5和夹持电极负极21包括半圆弧状接触面9,所述夹持电极正极5和夹持电极负极21能够在预制坯6连续送进过程中与其保持接触而通电;所述夹持电极正极5、夹持电极负极21、所述滑动电极负极22的脉冲电压为5v~30v,脉冲宽度为10μs~300μs。
86.所述夹持电极正极5和夹持电极负极21以及滑动电极负极22,均由导电性能优异的纯铜制成。当预制坯6沿轴向进给经过正极区时,调节正极部分电极基座水平方向的位
置,使所述夹持电极正极5和夹持电极负极21进入闭合状态。正极接触预制坯6外表面,接触面为弧形面,曲率与预制坯6外表面相同,夹紧后与预制坯6紧密接触并起到夹持固定的作用。预制坯6在接触夹持电极负极21前,需通过与夹持电极负极21相连的滑动电极负极22与预制坯6前端接触以形成电流的闭合回路,滑动电极负极22嵌套在芯棒1外侧,夹持电极负极21闭合后首先与滑动电极负极22接触。该滑动电极负极22为环状,外径小于成形构件外径,在成形过程中不会受锤头击打。滑动电极负极22能够与芯棒1之间发生轴向相对移动,通过弹簧对滑动电极负极22施加与进给方向相反的柔性压力,以保证滑动电极负极22能够与预制坯6前端保持全程接触,还可以使电极能跟随预制坯6沿轴向摆动和复位,以适应预制坯6在锻造时跟随锤头的摆动与锤头松开后的复位。
87.由于成形过程中预制坯6塑性变形和装置振动易导致电极/预制坯6接触状态不稳定,通过弹簧对夹持电极正极5和夹持电极负极21施加沿水平方向的柔性夹紧力,以确保夹持电极正极5和夹持电极负极21与预制坯6/滑动电极负极22之间的可靠接触。当预制坯6经过进给沿轴向前进,并经过变形区发生轴向伸长后,变形区前端逐渐接近并接触夹持电极负极21,夹持电极负极21于预制坯6出口段为锥面,预制坯6接触夹持电极负极21后使电极沿径向向外侧移动,同时将滑动电极负极22推离电流回路(不再接触夹持电极负极21),此时电流方向为“夹持电极正极5
‑
预制坯6
‑
夹持电极负极21”。
88.为确保装置安全性、同时实现电流方向的定向集中引导,需对与电流闭合回路无关且接触导电部分的零部件进行绝缘处理,在其表面喷涂陶瓷材料涂层。
89.步骤三、成形装置启动:
90.启动推杆7及芯棒1的进给装置,使得预制坯6沿轴向向前以一定速率前进,且推杆7及芯棒1的轴向给进速率相同;
91.此时,预制坯6先经过第一组锤头3,后经过第二组锤头4,当预制坯6到达第一组锤头3前,夹持电极正极5和滑动电极负极22接通产生脉冲辅助电流,变形区内的预制坯6升温,接通夹持电极正极5和滑动电极负极22的同时,第一组锤头3和第二组锤头4在驱动装置的作用下开始高频脉冲径向加载。
92.锤头的径向高频脉冲加载是通过轴承和锤头撞块的相互作用实现的。锤头撞块上部为弧形面,撞块和锤头受弹簧拉力而保持在不加载的工作位置,在主轴转动过程中,撞块弧面转动到轴承滚子处时沿径向向内运动,撞击锤头而实现加载;当撞块弧面转动至滚子轴承间隙处时,撞块回复到不加载的工作位置。由于锤头撞块与锤头之间发生高频冲击,优选的,可以在锤头撞块与锤头之间设置高强抗震橡胶垫进行缓冲。
93.优选的,推杆7和芯棒1的轴向进给速率均为5mm/s~20mm/s;所述芯棒1和所述推杆7均采用高温合金材料。
94.步骤四、成形装置工作:
95.随预制坯6的连续进给,预制坯6在脉冲电流辅助作用下经过变形区,在第一组锤头3和第二组锤头4的高频锤击作用下预制坯6发生塑性变形,随后继续从变形区流出,预制坯6完成成形过程;
96.步骤五、得到深盲孔壳体锻件:
97.拆卸芯棒1,将芯棒1与变形后的预制坯6分离,得到深盲孔壳体锻件。
98.所述芯棒1、推杆7、第一组锤头3、第二组锤头4的表面均进行绝缘处理。
99.深盲孔壳体脉冲电流辅助局部镦锻连续成形装置,
100.成形装置包括芯棒1、推杆7、第一组锤头3和第二组锤头4,芯棒1和推杆7通过进给装置控制移动,
101.成形装置在预制坯6的入口端及出口端分别设置一个夹持电极正极5和夹持电极负极21,同时在芯棒1外侧设有滑动电极负极22,夹持电极正极5和夹持电极负极21之间为变形区,滑动电极负极22与预制坯6的顶端接触,夹持电极正极和夹持电极负极、滑动电极负极均与脉冲直流电源8连接,
102.第一组锤头3的内部孔径大于第二组锤头4的内部孔径,第一组锤头3实现预制坯6的第一次减薄,第一组锤头3入口部分为第一入口扩口锥面31,第一入口扩口锥面31与径向加载工作面s之间的斜度为10
°
~30
°
,第一入口扩口锥面31用以确保预制坯6送进的准确性和稳定性,第一组锤头3出口部分还包括第一出口扩口锥面32,第一出口扩口锥面32与径向加载工作面s之间的斜度为20
°
~60
°
。
103.同时第一入口扩口锥面31和第一出口扩口锥面32与径向加载工作面s之间均设有一定大小的第一过渡圆角33,第一过渡圆角33半径为5mm~20mm。
104.第二组锤头入口部分为第二入口扩口锥面41,第二入口扩口锥面41与径向加载工作面s之间的斜度为20
°
~60
°
,第二过渡圆角43第二组锤头4出口部分还包括第二出口扩口锥面42,第二出口扩口锥面42与径向加载工作面s之间的斜度为10
°
~30
°
。第二入口扩口锥面41和第二出口扩口锥面42与径向加载工作面s之间均设有一定大小的第二过渡圆角43,第二过渡圆角43半径为5mm~20mm。
105.预制坯6经过第一组锤头3拔长后的流动到第二组锤头4处被继续拔长,过程中,有一部分预制坯6沿轴向向前流动,有一部分预制坯6受到第二组锤头4入口锥面的阻碍而在第一组锤头3和第二组锤头4之间堆积,形成局部镦粗变形区。
106.第一组锤头3和第二组锤头4均包括轴承和锤头撞块,锤头撞块上部为弧形面。
107.所述夹持电极正极5和夹持电极负极21包括半圆弧状接触面9,所述夹持电极正极5和夹持电极负极21能够在预制坯6连续送进过程中与其保持接触而通电;所述滑动电极负极22的一端与预制坯6接触,另一端设有弹性体23,所述弹性体23可以随预制坯6的轴向移动被压缩。
108.以下通过具体实施例对本发明进一步解释。
109.具体实施方式一:
110.步骤一:
111.选择外径为28mm、高度为40mm的aermet100超高强钢(23co14ni12cr3moe)圆柱预制坯6,通过热挤压成形设备制备外径为28mm、内径为12mm、长度为46mm、孔深为30mm的盲孔件作为预制坯6。
112.步骤二:
113.第一组锤头3轴向厚度为14mm,第一入口扩口锥面31斜度为20
°
,径向加载工作面s长度为4mm,第一过渡圆角33半径为20mm,第一出口扩口锥面32斜度为60
°
;第二组锤头4整体厚度为14mm,第二入口扩口锥面41斜度为60
°
,径向加载工作面s长度为5mm,第二过渡圆角43半径为5mm。第一组锤头3径向压下量选择为2mm,第二组锤头4径向压下量选择为2mm。第一组锤头3和第二组锤头4的表面喷涂cr2o3陶瓷涂层。采用滚子数为15的轴承作为锤头撞
块的径向加载驱动装置,通过伺服电机驱动装置带动第一组锤头3和第二组锤头4转动,实现第一组锤头3和第二组锤头4的高频脉冲径向加载。在锤头与锤头撞块之间设置厚度为3mm的热塑性聚氨酯橡胶(tpu)缓冲橡胶垫。
114.根据预制坯6外径为28mm,锻后外径为20mm,为确保推杆7不被第一组锤头3和第二组锤头4锻打,选择推杆7直径为18mm,长度为50mm,,推杆7远端由推杆7夹持卡盘固定,由电机和丝杠机构控制推杆7轴向进给运动,推杆7材料为k406镍基高温合金,推杆7与预制坯6接触端表面有cr2o3陶瓷涂层。
115.根据预制坯6内直径为12mm,选择芯棒1直径为12mm,长度为80mm,要确保芯棒1能够放置在预制坯6中以起到对预制坯6的固定和导向作用,使用芯棒1夹持卡盘固定芯棒1将其与设备相连,由电机和丝杠机构控制其轴向运动;芯棒1材料为k406镍基高温合金,芯棒1表面有cr2o3陶瓷涂层。
116.在预制坯6入口和出口的两端设置夹持电极正极5和夹持电极负极21,电极外部接入脉冲直流电源,选择脉冲电压为10v,脉冲宽度为100μs,夹持电极正极5和夹持电极负极21的闭合面开有半圆弧状接触面9,夹持电极正极5和夹持电极负极21闭合后能够在预制坯6连续送进过程中与其保持接触而通电,同时对预制坯6起到一定的导向作用。
117.把芯棒1装配于预制坯6中,随后把芯棒1另一端固定在芯棒1夹持卡盘,固定后,操作芯棒1出进给部分调节预制坯6初始位置。把推杆7一端与推杆7夹持卡盘相连接固定,固定后,操作推杆7处推进部分进给推杆7,使其顶住预制坯6底部。
118.设置旋锻设备工作参数,选择主轴转速为150r/min(由设备滚子数为15个可知对应锤头打击频率为1350次/min),根据滚子结构确定锤头总行程为5mm。
119.步骤三:
120.芯棒1和推杆7处的进给速度一致,均设置为10mm/s,进而使预制坯6沿轴向前进。
121.闭合夹持电极正极5和夹持电极负极21,使预制坯6在进入变形区前接通脉冲辅助电流,在焦耳热效应下开始升温。接通夹持电极正极5和夹持电极负极21的同时,预制坯6前进,第一组锤头3和第二组锤头4在驱动装置的作用下开始高频脉冲径向加载。
122.步骤四:
123.随预制坯6以10mm/s的速度连续进给,在脉冲电流辅助作用下经过变形区,在两组锤头的高频锤击作用下发生塑性变形,随后继续从变形区流出,完成成形过程。
124.步骤五:
125.停止设备,关闭电源,待设备稳定停止时,拆卸芯棒1,将芯棒1与变形后的壳体分离,获得深盲孔壳体锻件。
126.具体实施方式二:
127.步骤一:
128.选择外径为26mm、高度为40mm的30crmnsini2a圆柱预制坯6,通过热挤压成形设备制备外径为26mm、内径为12mm、长度为44mm、孔深为28mm的盲孔件作为预制坯6。
129.步骤二:
130.第一组锤头3轴向厚度为14mm,第一入口扩口锥面31斜度为18
°
,径向加载工作面s长度为4mm,第一过渡圆角33半径为20mm,第一出口扩口锥面32斜度为60
°
;第二组锤头4整体厚度为14mm,第二入口扩口锥面41斜度为60
°
,径向加载工作面s长度为5mm,第二过渡圆
角43半径为5mm。第一组锤头3径向压下量选择为2mm,第二组锤头4径向压下量选择为2mm。第一组锤头3和第二组锤头4表面喷涂al2o3陶瓷涂层。采用滚子数为15的轴承作为锤头撞块的径向加载驱动装置,通过伺服电机驱动装置带动第一组锤头3和第二组锤头4转动,实现第一组锤头3和第二组锤头4的高频脉冲径向加载。在锤头与锤头撞块之间设置厚度为3mm的热塑性硫化橡胶(tpv)缓冲橡胶垫。
131.根据预制坯6外径为26mm,锻后外径为18mm,为确保推杆7不被锤头锻打,选择推杆7直径为16mm,长度为40mm,,推杆7远端由推杆7夹持卡盘固定,由电机和丝杠机构控制推杆7轴向进给运动,推杆7材料为k406镍基高温合金,与预制坯6接触端表面有al2o3陶瓷涂层。
132.根据预制坯6内直径为12mm,选择芯棒1直径为12mm,长度为80mm,要确保芯棒1能够放置在预制坯6中以起到对预制坯6的固定和导向作用,使用芯棒1夹持卡盘固定芯棒1将其与设备相连,由电机和丝杠机构控制其轴向运动;芯棒1材料为k406镍基高温合金,表面有al2o3陶瓷涂层。
133.在预制坯6入口和出口的两端设置夹持电极正极5和夹持电极负极21,电极外部接入脉冲直流电源,选择脉冲电压为20v,脉冲宽度为120μs,夹持电极正极5和夹持电极负极21的闭合面开有半圆弧状接触面9,夹持电极正极5和夹持电极负极21闭合后能够在预制坯6连续送进过程中与其保持接触而通电,同时对预制坯6起到一定的导向作用。
134.把芯棒1装配于预制坯6中,随后把芯棒1另一端固定在芯棒1夹持卡盘,固定后,操作芯棒1出进给部分调节预制坯6初始位置。把推杆7一端与推杆7夹持卡盘相连接固定,固定后,操作推杆7处推进部分进给推杆7,使其顶住预制坯6底部。
135.设置旋锻设备工作参数,选择主轴转速为200r/min(由设备滚子数为15个可知对应锤头打击频率为1800次/min),根据滚子结构确定锤头总行程为5mm。
136.步骤三:
137.芯棒1和推杆7处的进给速度一致,均设置为12mm/s。进而使预制坯6沿轴向前进。
138.闭合夹持电极正极5和夹持电极负极21,使预制坯6在进入变形区前接通脉冲辅助电流,在焦耳热效应下开始升温。接通夹持电极正极5和夹持电极负极21的同时,预制坯6前进,第一组锤头3和第二组锤头4在驱动装置的作用下开始高频脉冲径向加载。
139.步骤四:
140.随预制坯6以12mm/s的速度连续进给,在脉冲电流辅助作用下经过变形区,在两组锤头的高频锤击作用下发生塑性变形,随后继续从变形区流出,完成成形过程。
141.步骤五:
142.停止设备,关闭电源,待设备稳定停止时,拆卸芯棒1,将芯棒1与变形后的壳体分离,获得深盲孔壳体锻件。
143.具体实施方式三:
144.步骤一:
145.选择外径为24mm、高度为40mm的7075铝合金圆柱预制坯6,通过热挤压成形设备制备外径为24mm、内径为12mm、长度为46mm、孔深为30mm的盲孔件作为预制坯6。
146.步骤二:
147.第一组锤头3轴向厚度为14mm,第一入口扩口锥面31斜度为16
°
,径向加载工作面s长度为4mm,第一过渡圆角33半径为20mm,第一出口扩口锥面32斜度为60
°
,且与径向加载工
作面s的第一过渡圆角33半径为1.5mm;第二组锤头4整体厚度为14mm,第二入口扩口锥面41斜度为60
°
,径向加载工作面s长度为5mm,第二过渡圆角43半径为5mm。第一组锤头3径向压下量选择为1.5mm,第二组锤头4径向压下量选择为1.5mm。锤头表面喷涂zro2陶瓷涂层。采用滚子数为15的轴承作为锤头撞块的径向加载驱动装置,通过伺服电机驱动装置带动锤头卡盘转动,实现锤头的高频脉冲径向加载。在锤头与锤头撞块之间设置厚度为2.5mm的热塑性硫化橡胶(tpv)缓冲橡胶垫。
148.根据预制坯6外径为24mm,锻后外径为18mm,为确保推杆7不被锤头锻打,选择推杆7直径为16mm,长度为40mm,推杆7远端由推杆7夹持卡盘固定,由电机和丝杠机构控制推杆7轴向进给运动,推杆7材料为k406镍基高温合金,与预制坯6接触端表面有zro2陶瓷涂层。
149.根据预制坯6内直径为12mm,选择芯棒1直径为12mm,长度为80mm,要确保芯棒1能够放置在预制坯6中以起到对预制坯6的固定和导向作用,使用芯棒1夹持卡盘固定芯棒1将其与设备相连,由电机和丝杠机构控制其轴向运动;芯棒1材料为k406镍基高温合金,表面有zro2陶瓷涂层。
150.在预制坯6入口和出口的两端设置夹持电极正极5和夹持电极负极21,电极外部接入脉冲直流电源,选择脉冲电压为30v,脉冲宽度为150μs,夹持电极正极5和夹持电极负极21的闭合面开有半圆弧状接触面9,夹持电极正极5和夹持电极负极21闭合后能够在预制坯6连续送进过程中与其保持接触而通电,同时对预制坯6起到一定的导向作用。
151.把芯棒1装配于预制坯6中,随后把芯棒1另一端固定在芯棒1夹持卡盘,固定后,操作芯棒1出进给部分调节预制坯6初始位置。把推杆7一端与推杆7夹持卡盘相连接固定,固定后,操作推杆7处推进部分进给推杆7,使其顶住预制坯6底部。
152.设置旋锻设备工作参数,选择主轴转速为250r/min(由设备滚子数为17个可知对应锤头打击频率为2550次/min),根据滚子结构确定锤头总行程为5mm。
153.步骤三:
154.芯棒1和推杆7处的进给速度一致,均设置为14mm/s。进而使预制坯6沿轴向前进。
155.闭合夹持电极正极5和夹持电极负极21,使预制坯6在进入变形区前接通脉冲辅助电流,在焦耳热效应下开始升温。接通夹持电极正极5和夹持电极负极21的同时,预制坯6前进,第一组锤头3和第二组锤头4在驱动装置的作用下开始高频脉冲径向加载。
156.步骤四:
157.随预制坯6以14mm/s的速度连续进给,在脉冲电流辅助作用下经过变形区,在两组锤头的高频锤击作用下发生塑性变形,随后继续从变形区流出,完成成形过程。
158.步骤五:
159.停止设备,关闭电源,待设备稳定停止时,拆卸芯棒1,将芯棒1与变形后的壳体分离,获得深盲孔壳体锻件。
160.以上对本发明的具体实施方式作了详细介绍,对于本技术领域的技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也属于本发明权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1