一种相贯线焊接装置的制作方法
1.本发明涉及一种焊接机构,尤其涉及一种相贯线焊接装置。
背景技术:
2.目前,相贯线的焊接工艺多数采用人工焊接或机械与人工焊接。 由于焊接工作的特殊性,光线辐射、有害气体对人体健康有很严重的 影响。并且容易出现定位偏差、精准度不够、粘丝等情况,会直接影 响到最终焊接面的完整与美观性。且当遇上相贯线之类的有一定弧度 或曲线的工件,更加难以焊接完整美观。
技术实现要素:
3.为解决上述问题,本发明提供以下方案:
4.一种相贯线焊接装置,包括变位机构、焊接机构、预压机构以及 受台机构,预压机构设置于受台机构上,受台机构与变位机构连接, 所述焊接机构设置于变位机构后方;所述变位机构内设置有变位装 置,受台机构与变位机构连接,并由变位机构控制变位;所述预压机 构包括预压气缸、第一移动板、第二移动板、固定底板、导向轴及轴 压机构,所述固定底板与变位机构固定,导向轴下端与固定底板固定, 导向轴上端套设第一移动板与第二移动板,所述第一移动板及第二移 动板能够沿导向轴滑动;所述第一移动板上端设置有预压气缸,所述 预压气缸的活塞杆与第二移动板上端连接;所述轴压机构包括轴套底 座、轴套、轴承、压头以及轴压气缸,轴压气缸设置于轴套底座内, 轴套嵌于轴套底座内,轴承嵌于轴套内,轴承下端连接压头。
5.进一步的,所述变位机构为双轴变位机。
6.进一步的,所述双轴变位机包括固定架、水平转动装置以及纵向 转动装置,所述水平转动装置包括水平转动电机以及连接水平转动电 机的转盘,水平转动电机设置于固定架内;所述纵向转动装置为与固 定架横向连接的纵向转动电机。
7.进一步的,所述固定底板与所述固定架顶面固定连接。
8.进一步的,所述第一移动板上设置有电磁阀套件、端子排、精密 压力气压调压阀等组件用于控制整套设备信号传输、气压压力调节。
9.进一步的,所述压头内置定位块。
10.进一步的,所述转盘位于固定底板上方。
11.进一步的,所述受台机构包括固定块、底板、挡板及固定块导向 轴,所述底板位于转盘上,底板左右两端设置挡板,底板顶面设置固 定块,固定块连接固定块导向轴并由固定块导向轴控制位置。
12.在进行相贯线焊接时,先将物料放置于受台上,通过转动固定块 导向轴使固定块将物料夹紧,此时启动预压气缸将预压机构下压,直 到压头与物料相抵,再启动轴压气缸,使压头紧紧压住物料,防止物 料移动;启动焊接机构对物料进行焊接,在需要物料转向时,变位机 构启动,转盘带动物料在水平方向上转动,纵向转动装置带动物料在 竖直方向上
转动,达到各个位置均可以与焊接机构的焊枪接触进行焊 接工作。
13.本发明的有益效果在于:
14.1.保护工作者的安全:机器人对弧光反射,有害气体完全免疫。 焊接机器人很大的贡献之一就是将焊接工作者从有严重危害的工作 环境、有危险的工作环境中替换出来,同时现在人们越来越重视身 体安全,这样既可以减少公司在防护用具上购买支出,还降低了后 续因工作环境导致工人身体损害的补偿成本及法律成本。
15.2.改善产品质量:焊接机器人会按照焊接工程师的设定程序指 令进行稳定、重复的工作,焊枪与工装件之间总保持着既定的距离、 角度、力度。焊接厚度与速度稳定不变,不必担心焊枪粘枪、厚薄 不均。同时,焊接机器人的机械臂可以到达人工难以焊接的角度、位 置,焊接效率更高,焊接效果更完美。
16.3.节省空间及能耗:机器人本身的灵活性就决定了可以在高密度 的生产线或空间内安装,就有了地面、墙壁、导轨等多种安装方式。 这样焊接间的面积缩小,节约了场地成本,焊接的环境是需要一定能 耗来维持的,空间缩小了,能耗自然能减低。
附图说明
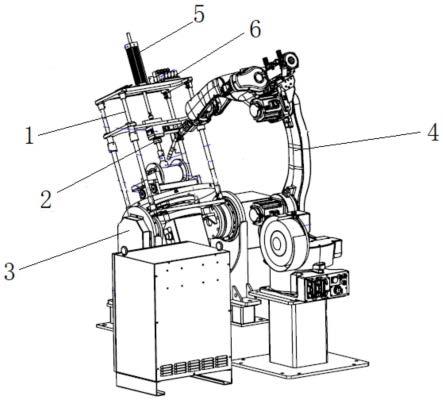
17.图1为本发明结构示意图;
18.图2为本发明侧视图。
[0019][0020][0021][0022]
图中:1.预压机构;2.轴压机构;3.双轴变位机;4.焊接机构;5.预压气缸;6.气压调节阀;7.第一移动板;8.导向轴;9.第二移动 板;10.轴套底座;11.轴套;12.轴承;13.压头;14.底板;15.转盘; 16.固定架;17.纵向转动装置;18.物料;19.挡板;20.固定块;21. 水平转动装置。
具体实施方式
[0023]
现在结合附图对本发明作进一步详细的说明。这些附图均为简化 的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本 发明有关的构成。
[0024]
实施例1:如图1-图2所示,
[0025]
一种相贯线焊接装置,包括变位机构、焊接机构4、预压机构1 以及受台机构,预压机构1设置于受台机构上,受台机构与变位机构 连接,所述焊接机构4设置于变位机构后方;所述变位机构内设置有 变位装置,受台机构与变位机构连接,并由变位机构控制变位;所述 预压机构1包括预压气缸5、第一移动板7、第二移动板9、固定底 板、导向轴8及轴压机构2,所述固定底板与变位机构固定,导向轴 8下端与固定底板固定,导向轴8上端套设第一移动板7与第二移动 板9,所述第一移动板7及第二移动板9能够沿导向轴8滑动;所述 第一移动板7上端设置有预压气缸5,所述预压气缸5的活塞杆与第 二移动板9上端连接;所述轴压机构2包括轴套底座10、轴套11、 轴承12、压头13以及轴压气缸,轴压气缸设置于轴套底座10内, 轴套11嵌于轴套底座10内,轴承12嵌于轴套11内,轴承12下端 连接压头13。
[0026]
进一步的,所述变位机构为双轴变位机3。
[0027]
进一步的,所述双轴变位机3包括固定架16、水平转动装置21 以及纵向转动装置17,所述水平转动装置21包括水平转动电机以及 连接水平转动电机的转盘15,水平转动电机设置21于固定架16内; 所述纵向转动装置17为与固定架16横向连接的纵向转动电机。
[0028]
进一步的,所述固定底板与所述固定架16顶面固定连接。
[0029]
进一步的,所述第一移动板7上设置有电磁阀套件、端子排、精 密压力气压调压阀等组件用于控制整套设备信号传输、气压压力调 节。
[0030]
进一步的,所述压头13内置定位块。
[0031]
进一步的,所述转盘15位于固定底板上方。
[0032]
进一步的,所述受台机构包括固定块20、底板14、挡板19及固 定块导向轴,所述底板14位于转盘15上,底板14左右两端设置挡 板19,底板14顶面设置固定块20,固定块20连接固定块导向轴并 由固定块导向轴控制位置。
[0033]
在进行相贯线焊接时,先将物料18放置于受台上,通过转动固 定块导向轴使固定块20将物料18夹紧,此时启动预压气缸5将预压 机构1下压,直到压头13与物料18相抵,再启动轴压气缸,使压头 13紧紧压住物料18,防止物料18移动;启动焊接机构4对物料18 进行焊接,在需要物料18转向时,变位机构启动,转盘15带动物料 18在水平方向上转动,纵向转动装置17带动物料15在竖直方向上 转动,达到各个位置均可以与焊接机构4的焊枪接触进行焊接工作。
[0034]
本发明保护工作者的安全:机器人对弧光反射,有害气体完全免 疫。焊接机器人很大的贡献之一就是将焊接工作者从有严重危害的工 作环境、有危险的工作环境中替换出来,同时现在人们越来越重视身 体安全,这样既可以减少公司在防护用具上购买支出,还降低了后续 因工作环境导致工人身体损害的补偿成本及法律成本。改善产品质 量:焊接机器人会按照焊接工程师的设定程序指令进行稳定、重复的 工作,焊枪与工装件之间总保持着既定的距离、角度、力度。焊接厚 度与速度稳定不变,不必担心焊枪粘枪、厚薄不均。同时,焊接机器 人的机械臂可以到达人工难以焊接的角度、位置,焊接效率更高, 焊接效果更完美。节省空间及能耗:机器人本身的灵活性就决定了可 以在高密度的生产线或空间内安装,就有了地面、墙壁、导轨等多种 安装方式。这样焊接间的面积缩小,节约了场地成本,焊接的环境是 需要一定能耗来维持的,空间缩小了,能耗自然能减低。
[0035]
最后,需要注意的是,以上列举的仅是本发明的具体实施例。显 然,本发明不限于以上实施例,还可以有很多变形。本领域的普通技 术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应 认为是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1