一种工件精准定位合模设备的制作方法
1.本发明涉及工件合模加工设备领域,尤其涉及一种工件精准定位合模设备。
背景技术:
2.例如手机中框等尺寸精度要求较高的工件产品在进行cnc加工处理前,需要匹配到相应的模具上实施合模工序,合模工序对产品对位精度要求较高,现有通用设备无法实现高精度对位操作,容易造成产品工件变形损坏,严重影响产品良率。
技术实现要素:
3.本发明主要解决的技术问题是提供一种工件精准定位合模设备,具有一次定位机构和二次校正机构,通过机构内的定位pin实施初步定位,通过机构内的从动滑块和零压校正挡块的相互配合联动实施二次高精定位,为工件合模工序提供安全稳定的前提保障,从而有效提高产品合模成功率。
4.为解决上述技术问题,本发明采用的一个技术方案是:提供一种工件精准定位合模设备,包括机架、作业平台以及连接在控制系统上的水平搬运机构、一次定位机构、上料流水线、二次校正机构、合模机构、下料搬运机构,所述机架上设置有控制系统和作业平台,所述作业平台上设置有水平搬运机构,所述水平搬运机构吊装一次定位机构,所述一次定位机构的行经沿线依次配备有上料流水线、二次校正机构、合模机构,所述合模机构下行衔接下料搬运机构。
5.在本发明一个较佳实施例中,所述一次定位机构由背板、气动升降台、上模工装、气动夹爪、气动定位pin、光电开关组成,所述背板的背面上连水平搬运机构,所述背板的正面竖直设置气动升降台,所述气动升降台水平吊装上模工装,所述上模工装开孔并于孔内竖直向下布置气动夹爪和气动定位pin,所述上模工装边缘设置光电开关上连控制系统。
6.在本发明一个较佳实施例中,所述二次校正机构由支架、下模工装、x轴轨道、y轴轨道、手指气缸、x轴驱动滑块、x向平行滑槽、八字滑槽、x向从动滑块、随动销、y向从动滑块、零压校正挡块组成,所述支架立于作业平台并水平承载下模工装,所述下模工装具有由x轴轨道和y轴轨道构成的中空内腔,所述下模工装底部吊装手指气缸,所述手指气缸传动两片埋设于x轴轨道内的x轴驱动滑块,每一x轴驱动滑块表面设置x向平行滑槽以及以x轴向为对称轴的八字滑槽,所述x向平行滑槽内设置有x向从动滑块,所述八字滑槽内竖直插接一对随动销,每一随动销连接一y向从动滑块,所述y向从动滑块对称埋设于y轴轨道内,所述y向从动滑块和x向从动滑块端部均竖直设置有等高的零压校正挡块。
7.本发明的有益效果是:本发明提供的一种工件精准定位合模设备,具有一次定位机构和二次校正机构,通过机构内的定位pin实施初步定位,通过机构内的从动滑块和零压校正挡块的相互配合联动实施二次高精定位,为工件合模工序提供安全稳定的前提保障,从而有效提高产品合模成功率。
附图说明
8.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:图1 是本发明一种工件精准定位合模设备的立体结构图;图2 是本发明一种工件精准定位合模设备的俯视图;图3 是本发明一种工件精准定位合模设备的一次定位机构的结构图;图4 是本发明一种工件精准定位合模设备的一次定位机构与二次校正机构衔接状态时的结构图;图5 是本发明一种工件精准定位合模设备的二次校正机构的结构图;图6 是本发明一种工件精准定位合模设备的二次矫正机构中下模工装的结构图;图7 是本发明一种工件精准定位合模设备的二次校正机构中隐藏下模工装后展示的手指气缸结构图;图8 是本发明一种工件精准定位合模设备的x轴驱动滑块的结构图;图9 是本发明一种工件精准定位合模设备的上料流水线的结构图;图10 是本发明一种工件精准定位合模设备的工装结构图;图11 是本发明一种工件精准定位合模设备的感应器结构图。
具体实施方式
9.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
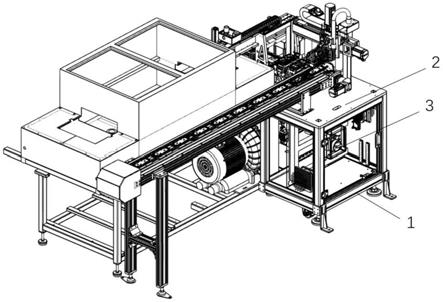
10.如图1
‑
11所示,本发明实施例包括:一种工件精准定位合模设备,包括机架1、作业平台2以及连接在控制系统3上的水平搬运机构4、一次定位机构5、上料流水线6、二次校正机构7、合模机构8、下料搬运机构9,所述机架1上设置有控制系统3和作业平台2,所述作业平台2上设置有水平搬运机构4,所述水平搬运机构4吊装一次定位机构5,所述一次定位机构5的行经沿线依次配备有上料流水线6、二次校正机构7、合模机构8,所述合模机构8下行衔接下料搬运机构9。
11.其中,所述一次定位机构5由背板51、气动升降台52、上模工装53、气动夹爪54、气动定位pin55、光电开关100组成,所述背板51的背面上连水平搬运机构4,所述背板51的正面竖直设置气动升降台52,所述气动升降台52水平吊装上模工装53,所述上模工装53开孔并于孔内竖直向下布置气动夹爪54和气动定位pin55,所述上模工装53边缘设置光电开关100上连控制系统3。
12.进一步的,所述二次校正机构7由支架701、下模工装702、x轴轨道703、y轴轨道704、手指气缸705、x轴驱动滑块706、x向平行滑槽707、八字滑槽708、x向从动滑块709、随动销710、y向从动滑块711、零压校正挡块712组成,所述支架701立于作业平台2并水平承载下模工装702,所述下模工装702具有由x轴轨道703和y轴轨道704构成的中空内腔,所述下模
工装702底部吊装手指气缸705,所述手指气缸705传动两片埋设于x轴轨道703内的x轴驱动滑块706,每一x轴驱动滑块706表面设置x向平行滑槽707以及以x轴向为对称轴的八字滑槽708,所述x向平行滑槽707内设置有x向从动滑块709,所述八字滑槽708内竖直插接一对随动销710,每一随动销710连接一y向从动滑块711,所述y向从动滑块711对称埋设于y轴轨道704内,所述y向从动滑块711和x向从动滑块709端部均竖直设置有等高的零压校正挡块712。
13.如图9
‑
11所示,所述上料流水线6是由伺服61传动链轮链条62并经链节63带动工装64沿料轨65等间距匀速供料,所述上料流水线6的尾端设置有如图11所示的感应器,感应器由带滑轮槽66的底座67以及分布在滑轮槽66对称两外侧的一对光电开关100组成,相应地工装64底部配备有两枚配合滑轮槽66的走线滑轮68以及一对适配光电开关100的感应片69;如图3所示,当链节63带动工装64到达感应器后伺服61短暂停机,此时水平搬运机构4带动一次定位机构5同时完成取走物料和初步定位工序,具体地:气动升降台52下行直到光电开关100感应到产品200物料,此时控制系统3触发气动夹爪54夹取产,榆次同时,所述气动定位pin55下探插接产品200实施定位;由于上述定位工序存在较大的定位公差,为了使最后的合模工序能安全高效地将产品200压合到高精度模具上,需要将产品200通过水平搬运机构4转移到二次校正机构7上实施高精度二次定位校正工作,使定位公差达到微米级别;因此,如图4
‑
8所示,产品200由一次定位机构5移交到二次校正机构7上,所述气动夹爪54松脱,气动定位pin55回收,整个一次定位机构5复位;随后,在手指气缸705旁的光电开关100的辅助下,手指气缸705带动两片x轴驱动滑块706外扩平移,平移过程中,x向从动滑块709沿x轴向在x向平行滑槽707内被动位移,使零压校正挡块712推动产品200实施x轴向定位校正;另一方面,所述y向从动滑块711在随动销710与八字滑槽708的配合下沿着y轴轨道704发生被动位移,使零压校正挡块712推动产品200实施y轴向定位校正;由于上述校正过程中的滑块的动作均为被动位移,因此校正过程不会造成对产品200的过载顶撑,从而在保证微米级高精度实施校正工序的前提下有效防止产品200受力发生变形。
14.最后,经高精度校正工序后的产品200转移到合模机构8处做进一步加工处理,最后由下料搬运机构9实施下料动作。
15.综上所述,本发明提供了一种工件精准定位合模设备,具有一次定位机构5和二次校正机构7,通过机构内的定位pin实施初步定位,通过机构内的从动滑块和零压校正挡块712的相互配合联动实施二次高精定位,为工件合模工序提供安全稳定的前提保障,从而有效提高产品200合模成功率。
16.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1