一种球罐无焊缝成型方法与流程
1.本发明涉及机加工领域,特别涉及一种球罐无焊缝成型方法。
背景技术:
2.球罐作为一种压力容器,在化工领域经常使用。现有技术中,由于球罐一般体积较大,因此多采用利用多块钢板进行拼接的方式进行制造。但是这种方式由于焊缝较多。
3.一方面,较多的焊缝会导致工作量的增加,制造效率较低;另一方面,由于球罐作为压力容器,其对密封性要求较高,因此制作完成后需要对所有焊缝进行探伤检测,不仅工作量大、费时费力,还经常由于焊接不合格而返工。
4.因此,需要提供一种可以减少工作量、提高合格率的生产装备。
技术实现要素:
5.本发明提供一种球罐无焊缝成型方法,可以解决现有技术中球罐制作时焊缝较多、不良率较高的问题。
6.一种球罐无焊缝成型方法,包括一加工装置,所述加工装置包括:
7.机架;
8.升降装置,其固定设置在所述机架上;
9.上模座和下模座,所述下模座固定设置在所述机架上,所述升降装置用于带动所述上模座上下运动;所述上模座上开设有第一成型腔,所述下模座上开设有第二成型腔;所述第一成型腔和所述第二成型腔相匹配,构成一完整的成型腔室;所述上模座和所述下模座上均相向延伸设置有一格挡部;以及,
10.成型装置,设置在所述机架上,用于对工件进行挤压以使工件贴合至成型腔室的侧壁;
11.所述成型装置包括:
12.驱动电机,固定设置在所述机架上;
13.支撑座,位于所述上模座和所述下模座之间,所述支撑座固定安装在所述驱动电机的输出端,所述支撑座上开设有偶数个驱动滑槽;
14.驱动装置,其包括固定齿轮和成型器,所述成型器和所述驱动滑槽一一对应;所述成型器包括传动齿轮和往复螺杆,所述往复螺杆可转动地设置在所述支撑座上,所述往复螺杆的一端贯穿所述驱动滑槽、另一端传动连接至所述传动齿轮,所述传动齿轮与所述固定齿轮相啮合;所述固定齿轮与所述支撑座的转动中心同轴布置,所述固定齿轮固定设置在所述机架上;以及,
15.电动伸缩杆,所述电动伸缩杆上设置有滑块,所述滑块上开设有与所述往复螺杆相配合的螺纹孔,所述滑块可滑动地设置在所述驱动滑槽内,所述往复螺杆转动时,带动所述滑块往复移动;所述电动伸缩杆的输出端设置有成型球;
16.所述成型方法包括:
17.s1,将工件放置在下模座上的第二成型腔内,使成型装置位于工件内腔处;
18.s2,启动升降气缸,带动上模座下移,使上模座和下模座相配合形成一完整的成型腔室;
19.s3,启动驱动电机,驱动电机带动支撑座转动,支撑座转动时,带动往复螺杆进而带动传动齿轮沿固定齿轮公转,传动齿轮公转时同步产生自转,传动齿轮自转时带动往复螺杆转动,进而带动滑块往复滑动,滑块往复滑动时,带动电动伸缩杆同步往复滑动;
20.s4,电动伸缩杆带动成型球移动,成型球抵靠在工件上,迫使工件产生变形,从而逐渐贴紧成型腔的内壁,形成和成型腔相仿的结构。
21.更优地,所述电动伸缩杆的输出端设置有球座,所述成型球可转动地设置在所述球座内。
22.更优地,还包括控制装置,其包括处理器和无线收发模块,所述无线收发模块固定设置在所述电动伸缩杆上,所述驱动电机、所述电动伸缩杆、所述无线收发模块均信号连接至所述处理器,所述无线收发模块信号连接至所述电动伸缩杆。
23.更优地,所述控制装置还包括压力传感器,所述压力传感器设置在所述球座上,用于监测所述成型球所受到的压力;
24.所述成型方法还包括:
25.s5,压力传感器实时监测成型球所受到的压力,当成型球受到的阻力大于预设阈值时,处理器发送控制信号至无线收发模块,无线收发模块将信号传送至电动伸缩杆,控制电动伸缩杆回缩预设的距离,继续成型过程;
26.s6,电动伸缩杆继续移动预设距离后,处理器再次发送信号控制电动伸缩杆回到回缩前的距离处,循环进行上述动作。
27.本发明提供一种球罐无焊缝成型方法,通过成型装置使工件逐步贴合至成型腔室的侧壁,将工件挤压成球形结构,只需两端焊接封头即可,可以有效减少焊缝、提高合格率。
附图说明
28.图1为本发明提供的一种球罐无焊缝成型方法的结构示意图;
29.图2为图1中a处局部放大图;
30.图3为图1的主视图;
31.图4为图3中b
‑
b剖视图;
32.图5为图4中d处局部放大图;
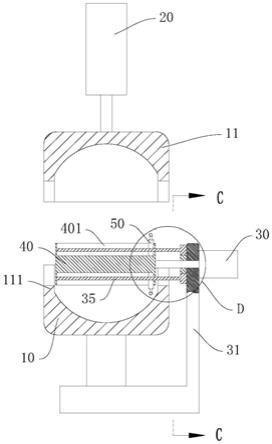
33.图6为图4中c
‑
c剖视图;
34.图7为本发明提供的一种球罐无焊缝成型方法的系统原理图;
35.图8为本发明提供的一种球罐无焊缝成型方法的工作状态示意图;
36.图9为另一实施例的工作状态示意图。
37.附图标记说明:
38.00工件;10下模座;11上模座;111格挡部;20升降气缸;30驱动电机;31机架;32固定齿轮;33传动轴;34传动齿轮;35往复螺杆;40支撑座;401驱动滑槽;50电动伸缩杆;51成型球。
具体实施方式
39.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
40.实施例一:
41.本发明用于对管件状的无缝管进行成型加工。待加工的工件为管状的无缝管。
42.如图1至图6所示,本发明实施例提供的一种球罐无焊缝成型方法,包括一加工装置,该加工装置包括机架、升降装置和成型装置:
43.升降装置固定设置在机架上;
44.上模座和下模座,下模座固定设置在机架上,升降装置用于带动上模座上下运动,其中,该升降装置可以为液压缸、气缸或电动伸缩杆等可实现带动上模座上下移动的装置即可;上模座上开设有第一成型腔,下模座上开设有第二成型腔,第一成型腔和第二成型腔相匹配,构成一完整的成型腔室;第一成型腔和第二成型腔均为非完整的半球形结构,成型腔室为一个两端具有缺口的球形结构。其中,上模座和下模座均相向延伸设置有格挡部,如图4所示,格挡部为第一成型腔和/或成型腔的两侧相向延伸设置,用于对工件进行限位。其整体结构大致类似在意完整的球形空间的相对两侧采用相平行的两个平面进行切割,两个平面沿球形中心对称设置,在切割处相向延伸设置该格挡部。相向延伸的格挡部可以有效的对工件进行定位,方便对工件进行定位,防止成型加工过程中工件非受控的产生偏移。
45.成型装置设置在机架上,用于对工件进行挤压以使工件贴合至成型腔室的侧壁。
46.具体地,成型装置包括驱动电机、支撑座、驱动装置和电动伸缩杆:
47.如图4所示,驱动电机固定设置在机架上且位于上模座和下模座的同一侧;
48.支撑座位于上模座和下模座之间、成型腔室内,支撑座固定安装在驱动电机的输出端,支撑座上开设有偶数个驱动滑槽,本实施例中以两个驱动滑槽为例;驱动电机转动时,带动支撑座转动。
49.驱动装置包括固定齿轮和成型器,成型器和驱动滑槽一一对应;成型器包括传动齿轮和往复螺杆,往复螺杆可转动地设置在支撑座上,往复螺杆的一端贯穿驱动滑槽、另一端传动连接至传动齿轮,传动齿轮与固定齿轮相啮合;固定齿轮与支撑座的转动中心同轴布置,固定齿轮固定设置在机架上;
50.电动伸缩杆,电动伸缩杆上设置有滑块,滑块上开设有与往复螺杆相配合的螺纹孔,滑块可滑动地设置在驱动滑槽内,驱动滑槽限位滑块的转动自由度,往复螺杆转动时,由于滑块不具有转动自由度,因此滑块在往复螺杆的带动下会沿着驱动滑槽的延伸方向往复滑动;电动伸缩杆的输出端设置有成型球。
51.具体的,电动伸缩杆的输出端设置有球座,成型球可转动地设置在球座内。
52.所述成型方法包括:
53.s1,将工件放置在下模座上的第二成型腔内,使成型装置位于工件内腔处;
54.s2,启动升降气缸,带动上模座下移,使上模座和下模座相配合形成一完整的成型腔室;
55.s3,启动驱动电机,驱动电机带动支撑座转动,支撑座转动时,带动往复螺杆进而带动传动齿轮沿固定齿轮公转,传动齿轮公转时同步产生自转,传动齿轮自转时带动往复螺杆转动,进而带动滑块往复滑动,滑块往复滑动时,带动电动伸缩杆同步往复滑动;
56.s4,电动伸缩杆带动成型球移动,成型球抵靠在工件上,迫使工件产生变形,从而逐渐贴紧成型腔的内壁,形成和成型腔相仿的结构。
57.工作时,先将工件放置在下模座上的第二成型腔内,使成型装置位于工件内腔处,而后启动升降气缸,带动上模座下移,使上模座和下模座相配合形成一完整的成型腔室。
58.启动驱动电机转动,带动支撑座转动,支撑座转动时,带动往复螺杆进而带动传动齿轮沿固定齿轮公转,传动齿轮公转时,由于传动齿轮和固定齿轮啮合,因此传动齿轮还会产生自转,传动齿轮自转时带动往复螺杆转动,进而带动滑块往复滑动,滑块往复滑动时,带动电动伸缩杆同步往复滑动。电动伸缩杆在外部控制装置的控制下,带动成型球移动,成型球抵靠在工件上,迫使工件产生变形,从而逐渐贴紧成型腔的内壁,形成和成型腔相仿的结构。
59.实施例二:
60.在实施例一中,由于成型过程是循序渐进的,而对于不同厚度和材质的材料,其成型过程所应当给予的进给量则是通过电动伸缩杆的伸长量来实现的,但是当工件璧薄、材质较软时,采用相同的进给量则会导致如图9所示的状态,导致工件产生较大幅度的弯折,使得电动伸缩杆在沿驱动滑槽的延伸方向上的进给会产生突变的力,阻力加大导致设备载荷非受控的提升,容易造成设备损坏,因此本实施例中,还包括控制装置,其包括处理器和无线收发模块,无线收发模块固定设置在电动伸缩杆上,驱动电机、电动伸缩杆、无线收发模块均信号连接至处理器,无线收发模块信号连接至电动伸缩杆。
61.进一步地,控制装置还包括压力传感器,压力传感器设置在球座上,用于监测成型球所受到的压力。
62.所述成型方法还包括:
63.s5,压力传感器实时监测成型球所受到的压力,当成型球受到的阻力大于预设阈值时,处理器发送控制信号至无线收发模块,无线收发模块将信号传送至电动伸缩杆,控制电动伸缩杆回缩预设的距离,继续成型过程;
64.s6,电动伸缩杆继续移动预设距离后,处理器再次发送信号控制电动伸缩杆回到回缩前的距离处,循环进行上述动作。
65.工作时,压力传感器实施监测成型球所受到的压力。当产生如图9所示的状态时,此时成型球受到的阻力会突然变大,此时,通过处理器发送控制信号至无线收发模块,无线收发模块将信号传送至电动伸缩杆,控制电动伸缩杆回缩预设的距离,继续成型过程。当出现如图9所示状态时,由于工件变形幅度较大,两侧的侧壁形成一夹角,此时成型球继续沿原轨迹移动必然承受较大的载荷,而当电动伸缩杆回缩一端距离,再继续移动时,则会避开工件变形处的拐点,电动伸缩杆继续移动预设距离后,处理器再次发送信号控制电动伸缩杆回到回缩前的距离处,此时成型球受到的阻力将小于处于拐点处的阻力。循环进行上述动作,可以有效避免因非受控阻力的变化而导致的设备加速损坏的问题。
66.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1