一种数控机床的三联动拉门的制作方法
1.本发明属于数控机床技术领域,具体涉及一种数控机床拉门。
背景技术:
2.目前现有的数控机床其拉门一般采用的是四门结构,即数控机床的门洞两侧分别设置一个二联动拉门,这种四门结构的数控机床在加工使用中不便于长料的上下料作业,在实际加工的使用中存在局限性,针对以上缺陷,有必要对现有数控机床的拉门结构进行改良。
技术实现要素:
3.针对现有技术的不足,本发明旨在提供一种能实现数控机床的六门结构以更便于对长料加工的上下料作业的数控机床三联动拉门。
4.为实现上述目的,本发明采用如下技术方案:
5.一种数控机床的三联动拉门,包括设于前端的门座板、设于门座板后方的第一拉门及设于第一拉门后方的第二拉门,门座板背面沿其长度方向水平延伸设有滑轨,第一拉门的两侧端底部分别安装设有第一滑块座和第二滑块座,第一滑块座及第二滑块座设有与门座板背面的滑轨配合滑动连接的滑块,第二拉门的两侧端底部分别安装设有第三滑块座和第四滑块座,第三滑块座及第四滑块座设有与门座板背面的滑轨配合滑动连接的滑块,第三滑块座位于第一滑块座及第二滑块座之间,第二拉门的后方设有第三拉门,第二拉门的背面位于第三滑块座和第四滑块座之间沿第二拉门的长度方向水平延伸安装有滑轨,第三拉门的两侧端底部分别安装设有第五滑块座和第六滑块座,第五滑块座设有与第二拉门背面的滑轨配合滑动连接的滑块,第六滑块座设有与门座板背面的滑轨配合滑动连接的滑块。
6.通过在现有数控机床二联动拉门的基础上,在第二拉门的后方增设第三拉门,并在第二拉门的背面位于第三滑块座和第四滑块座之间安装滑轨,将第三拉门的第五滑块座通过滑块与第二拉门背面的滑轨配合连接,将第三拉门的第六滑块座通过滑块与门座板背面的滑轨配合连接;拉门关闭时,拉动第三拉门使第五滑块座沿第二拉门背面的滑轨移动、第六滑块座沿门座板背面的滑轨移动,直到第五滑块座接近第二拉门的第四滑块座,然后第五滑块座作用在第四滑块座上带动第二拉门沿门座板背面的滑轨移动,直到第二拉门的第三滑块座接近第一拉门的第二滑块座,然后由第三滑块座作用在第二滑块座上带动第一拉门沿门座板背面的滑轨移动;拉门开启时,拉动第三拉门使第五滑块座沿第二拉门背面的滑轨移动、第六滑块座沿门座板背面的滑轨移动,直到第五滑块座接近第二拉门的第三滑块座,然后由第五滑块座作用在第三滑块座上带动第二拉门沿门座板背面的滑轨移动,直到第二拉门的第四滑块座接近第一拉门的第二滑块座,然后由第四滑块座作用在第二滑块座上带动第一拉门沿门座板背面的滑轨移动;在数控机床上加长门洞口并在门洞口的两侧采用这种数控机床三联动拉门能实现数控机床的六门结构,更便于对长料加工的上下料
作业。
7.本发明具有如下有益效果:
8.本发明数控机床的三联动拉门,具有能实现数控机床的六门结构以更便于对长料加工的上下料作业的特点,能有效解决目前现有数控机床普遍采用四门结构存在的不便于长料上下料加工作业的问题。
附图说明
9.图1为本发明数控机床的三联动拉门的开启状态示意图;
10.图2为本发明数控机床的三联动拉门的关闭状态示意图;
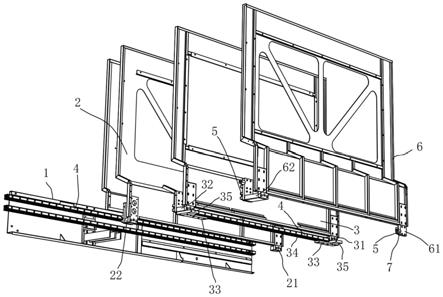
11.图3为本发明数控机床的三联动拉门的分解结构图;
12.图4为本发明数控机床的三联动拉门适用于数控机床时的示意图。
具体实施方式
13.下面结合附图及具体实施例,对本发明作进一步的描述,以便于更清楚地理解本发明要求保护的技术思想。
14.本发明数控机床的三联动拉门,如图1
‑
3所示包括设于前端的门座板1、设于门座板1后方的第一拉门2及设于第一拉门2后方的第二拉门3,门座板1背面沿其长度方向水平延伸设有滑轨4,第一拉门2的两侧端底部分别安装设有第一滑块座21和第二滑块座22,第一滑块座21及第二滑块座22设有与门座板1背面的滑轨4配合滑动连接的滑块5,第二拉门3的两侧端底部分别安装设有第三滑块座31和第四滑块座32,第三滑块座31及第四滑块座32设有与门座板1背面的滑轨4配合滑动连接的滑块5,第三滑块座31位于第一滑块座21及第二滑块座22之间,第二拉门3的后方设有第三拉门6,第二拉门3的背面位于第三滑块座31和第四滑块座32之间沿第二拉门3的长度方向水平延伸安装有滑轨4,第三拉门6的两侧端底部分别安装设有第五滑块座61和第六滑块座62,第五滑块座61设有与第二拉门3背面的滑轨4配合滑动连接的滑块5,第六滑块座62设有与门座板1背面的滑轨4配合滑动连接的滑块5。
15.这样在现有数控机床二联动拉门的基础上,在第二拉门3的后方增设第三拉门6,并在第二拉门3的背面位于第三滑块座31和第四滑块座32之间安装滑轨4,将第三拉门6的第五滑块座61通过滑块5与第二拉门3背面的滑轨4配合连接,将第三拉门6的第六滑块座62通过滑块5与门座板1背面的滑轨4配合连接;拉门关闭时,拉动第三拉门6使第五滑块座61沿第二拉门3背面的滑轨4移动、第六滑块座62沿门座板1背面的滑轨4移动,直到第五滑块座61接近第二拉门3的第四滑块座32,然后第五滑块座61作用在第四滑块座32上带动第二拉门3沿门座板1背面的滑轨4移动,直到第二拉门3的第三滑块座31接近第一拉门2的第二滑块座22,然后由第三滑块座31作用在第二滑块座22上带动第一拉门2沿门座板1背面的滑轨4移动;拉门开启时,拉动第三拉门6使第五滑块座61沿第二拉门3背面的滑轨4移动、第六滑块座62沿门座板1背面的滑轨4移动,直到第五滑块座61接近第二拉门3的第三滑块座31,然后由第五滑块座61作用在第三滑块座31上带动第二拉门3沿门座板1背面的滑轨4移动,直到第二拉门3的第四滑块座32接近第一拉门2的第二滑块座22,然后由第四滑块座32作用在第二滑块座22上带动第一拉门2沿门座板1背面的滑轨4移动;如图4所示在数控机床上加
长门洞口并在门洞口的两侧采用这种数控机床三联动拉门能实现数控机床的六门结构,更便于对长料加工的上下料作业。
16.具体第二拉门3背面的滑轨4的安装方式采用:第三滑块座31及第四滑块座32分别相向地凸出设有紧固安装部33,滑轨安装梁34的两端分别紧固安装于第三滑块座31、第四滑块座32的紧固安装部33,第二拉门3背面的滑轨4固定安装于滑轨安装梁34,滑轨安装梁34可直接采用铝型材。
17.此外,第三拉门6与第二拉门3之间的联动具体可采用:在第三滑块座31、第四滑块座32上分别朝第二拉门3背面的滑轨4的后方凸出设置止挡部35,由第五滑块座61作用在第四滑块座32上带动第二拉门3联动关闭,由第五滑块座61作用在第三滑块座31上带动第二拉门3联动开启。第五滑块座61的两侧侧部还可以再分别对应第三滑块座31、第四滑块座32的止挡部35安装设置防撞胶体7,这样可以减轻碰撞时产生的噪音。
18.同样的,第六滑块座62的两侧侧部也可以再安装设置防撞胶体7,以减轻在关闭和开启时碰撞产生的噪音。门座板1背面的滑轨4优选包括两条,第一滑块座21、第二滑块座22、第三滑块座31、第四滑块座32及第六滑块座62上的滑块5分别对应包括两个,这可以进一步提高拉门滑动时的稳定性。
19.对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及变形,而所有的这些改变以及变形都应该属于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1