一种双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法
1.本发明涉及搅拌摩擦焊接技术领域,特别涉及一种双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法。
背景技术:
2.目前,大型薄壁铝合金零件在航天器舱体、火箭燃料储箱、飞机机身等设备中广泛使用,这些零件的焊接通常采用气焊、弧焊等传统焊接方法,存在焊接质量差和有弧光、烟尘污染等方面的问题。搅拌摩擦焊接作为一种新兴的焊接技术,能耗低、污染小,焊接质量优良,非常适合薄壁铝合金零件的焊接。但是对于大型薄壁零件,搅拌摩擦焊接过程中产生的较大的顶锻力极易导致零件变形,进而产生未焊透缺陷等焊接质量问题。
3.为解决上述问题,近年来出现了一些解决薄壁零件搅拌摩擦焊接过程变形的方法。例如,专利cn111872543a中设计了一种贮箱封箱环缝搅拌摩擦焊接内撑装置,其特点是为薄壁零件设计支撑装置以减小搅拌摩擦焊接过程中的变形,但是这种支撑装置是专用设备,无法应用在其它零件的搅拌摩擦焊接过程。专利cn109967856a提出了一种通过磁力实现背部随动支撑的搅拌摩擦焊接方法,其特点是通过电磁装置同步驱动支撑体跟随焊接设备运动以减小搅拌摩擦焊接过程中的变形,但是由于磁力强度不足等问题,这种随动支撑同步性差、支撑能力弱,无法良好的解决薄壁零件搅拌摩擦焊接问题。
技术实现要素:
4.本发明为解决公知技术中存在的技术问题而提供一种双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法,能够实现双侧搅拌摩擦焊接装备的主从镜像同步运动,以解决薄壁零件搅拌摩擦焊接过程变形的问题。
5.本发明为解决公知技术中存在的技术问题所采取的技术方案是:一种双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法,设置主从两套搅拌摩擦焊接设备,分别为主焊接机器人和从焊接机器人;主、从焊接机器人分别在薄壁工件两侧同步对薄壁零件进行搅拌摩擦焊接,使主、从焊接机器人的焊头相对薄壁工件镜像移动。
6.进一步地,设主焊接机器人的焊头为焊头a,设从焊接机器人的焊头为焊头b;分别对主、从焊接机器人进行运动学建模及坐标系标定,确定主、从焊接机器人镜像同步运动的约束条件;在线监测焊头a和焊头b的实际运动轨迹与理论运动轨迹间的误差,依据镜像同步运动约束条件,同步对焊头a和焊头b的运动轨迹误差进行补偿。
7.进一步地,包括如下步骤:
8.步骤1:对主、从焊接机器人进行坐标系的建立与标定,坐标系包括两者的基座标系、末端法兰坐标系、工具坐标系以及工件坐标系;
9.步骤2:建立主、从焊接机器人的运动学模型;
10.步骤3:重构工件的几何模型,并离线生成主焊接机器人的理论焊接轨迹;
11.步骤4:根据焊头a和焊头b的镜像同步运动约束关系,得到从焊接机器人工具坐标
系相对于主焊接机器人工具坐标系的齐次变换矩阵,并得到主、从焊接机器人镜像同步运动的约束条件;
12.步骤5:由主焊接机器人的理论焊接轨迹,和主、从焊接机器人镜像同步运动的约束条件,在线生成从焊接机器人的理论焊接轨迹;
13.步骤6:将主、从焊接机器人理论焊接轨迹对应输入给主、从焊接机器人;由主、从焊接机器人的法兰坐标系相对基座标系的齐次变换矩阵,得到焊头a、b在基座标系中的位姿矢量,经逆运动学求解后发给驱动器,驱动主、从焊接机器人关节平移运动;
14.步骤7:在线实时监测主、从焊接机器人焊接过程中的运动轨迹误差,并实时对焊头a和焊头b的运动轨迹误差进行补偿。
15.本发明具有的优点和积极效果是:本发明采用双侧搅拌摩擦焊接装备,并进行了双侧搅拌摩擦焊接装备的运动学建模与标定,通过主、从焊接机器人镜像同步运动约束条件,实现了双侧搅拌摩擦焊接装备的主从镜像同步运动,能够有效的解决薄壁零件搅拌摩擦焊接过程变形的问题;精度高、灵活性好、适用范围广;
16.本发明对主、从焊接机器人变形误差的进行在线监测与补偿,进一步提高了双侧搅拌摩擦焊接装备主从镜像同步运动的精度。
附图说明
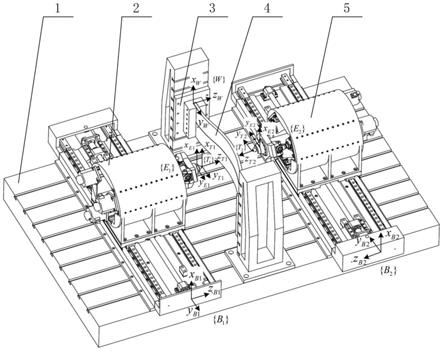
17.图1是本发明的双侧搅拌摩擦焊接装备的结构示意图;
18.图2是本发明的主、从焊接机器人镜像同步运动约束关系示意图;
19.图3是本发明的双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法工作流程图。
20.图中:1、工作台;2、主焊接机器人;3、夹具;4、工件;5、从焊接机器人;6、焊头a;7、焊头b。
具体实施方式
21.为能进一步了解本发明的发明内容、特点及功效,兹列举以下实施例,并配合附图详细说明如下:
22.请参见图1至图3,一种双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法,设置主从两套搅拌摩擦焊接设备,主从两套搅拌摩擦焊接设备分别为主焊接机器人和从焊接机器人;主焊接机器人和从焊接机器人分别在薄壁工件两侧同步对薄壁零件进行搅拌摩擦,使主、从焊接机器人的焊头相对薄壁工件的镜像移动。即主、从焊接机器人的焊头移动时,两个焊头的姿态和位置一直相对薄壁工件的中心呈对称状态。图中主焊接机器人即主焊接机器人,从焊接机器人即从焊接机器人。
23.进一步地,可设主焊接机器人的焊头为焊头a,可设从焊接机器人的焊头为焊头b;可分别对主、从焊接机器人进行运动学建模及坐标标定,确定主、从焊接机器人的镜像同步运动的约束条件;可在线监测焊头a和焊头b的实际运动轨迹与模型轨迹间的运动轨迹误差,依据主、从焊接机器人的镜像同步运动约束条件,同步对焊头a和焊头b的运动轨迹误差进行补偿。焊头也叫搅拌头。
24.进一步地,一种双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法可包括如下
步骤:
25.步骤1:可对主、从焊接机器人进行坐标系的建立与标定,坐标系包括两者的基座标系、末端法兰坐标系、工具坐标系以及工件坐标系。
26.步骤2:建立主、从焊接机器人的运动学模型;可依据现有技术的常规技术手段建立主、从焊接机器人的运动学模型。比如可参考如下文献建立主、从焊接机器人的运动学模型:john j.craig,贠超.机器人学导论[m].机械工业出版社,2006出版。
[0027]
步骤3:可重构工件的几何模型,并可离线生成主焊接机器人的理论焊接轨迹。
[0028]
步骤4:可根据焊头a和焊头b的镜像同步运动约束关系,得到从焊接机器人工具坐标系相对于主焊接机器人工具坐标系的齐次变换矩阵,并可得到主、从焊接机器人镜像同步运动的约束条件。
[0029]
步骤5:可由主焊接机器人的理论焊接轨迹,和主、从焊接机器人镜像同步运动的约束条件,在线生成从焊接机器人的理论焊接轨迹。
[0030]
步骤6:可将主、从焊接机器人理论焊接轨迹对应输入给主、从焊接机器人;可由主、从焊接机器人的法兰坐标系相对基座标系的齐次变换矩阵,得到焊头a、b在基座标系中的位姿矢量,经逆运动学求解后发给驱动器,驱动主、从焊接机器人关节平移。
[0031]
主、从焊接机器人的运动学模型,均包括逆运动学模型,逆运动学模型可包括多个方程。可依据现有技术的常规技术手段进行逆运动学求解。比如可参考如下文献建立主、从焊接机器人的逆运动学模型:john j.craig,贠超.机器人学导论[m].机械工业出版社,2006出版。
[0032]
步骤7:可在线实时监测主、从焊接机器人焊接过程中的运动轨迹误差,并可实时对焊头a和焊头b的运动轨迹误差进行补偿。
[0033]
下面以本发明的一个优选实施例来进一步说明本发明的工作原理:
[0034]
一种双侧搅拌摩擦焊接装备的主从镜像同步运动控制方法,设置两套搅拌摩擦焊接设备,分别为主焊接机器人和从焊接机器人;主、从焊接机器人分别在薄壁工件两侧同步对薄壁零件进行搅拌摩擦,使主、从焊接机器人的焊头相对薄壁工件镜像移动。
[0035]
该方法包括三个模块:分别对主、从焊接机器人进行运动学建模与标定;建立主、从焊接机器人的镜像同步运动约束条件;对主从焊接机器人变形误差的在线监测与补偿。最终实现双侧的主、从焊接机器人的焊头主从镜像同步运动。
[0036]
本发明的一个优选实施方法的具体实施步骤如下:
[0037]
步骤1:安装双侧搅拌摩擦焊接装备,包含搭建工作台、安装主焊接机器人、安装从焊接机器人、安装夹具和工件。
[0038]
步骤2:进行坐标系的建立与标定,包含主焊接机器人的基座标系{b1};从焊接机器人的基座标系{b2};主焊接机器人的末端法兰坐标系{e1};从焊接机器人的末端法兰坐标系{e2};主焊接机器人的焊头坐标系{t1};从焊接机器人的焊头坐标系{t2};以及工件坐标系{w}。
[0039]
步骤3:建立主、从焊接机器人的运动学模型。
[0040]
步骤4:重构焊件的几何模型,并离线生成主焊接机器人理论焊接轨迹。
[0041]
步骤5:建立主从焊接机器人镜像同步运动约束条件。请参见图2,o为薄壁工件的中心,根据主从焊接机器人的焊头镜像同步运动的约束关系d1=d2和α1=α2,可以求得从焊
接机器人工具坐标系{t2}相对于主焊接机器人工具坐标系{t1}的齐次变换矩阵所以主从机器人镜像同步运动的约束条件为其中,和分别为主从机器人工具坐标系相对于末端法兰坐标系的齐次变换矩阵,和分别为主从机器人末端法兰坐标系相对于基坐标系的齐次变换矩阵,为主机器人基座标系相对于从机器人基座标系的齐次变换矩阵。
[0042]
步骤6:根据主焊接机器人理论焊接轨迹和主从镜像同步运动约束条件在线生成从焊接机器人理论焊接轨迹。
[0043]
步骤7:将主焊接机器人理论焊接轨迹输入给主焊接机器人。设工件坐标系{w}中的期望路径点位姿向量为
w
p,p相对于工件坐标系{w}的齐次变换矩阵为则主焊接机器人法兰坐标系{e1}相对基座标系{b1}的齐次变换矩阵为其中是工件坐标系相对于主焊接机器人基坐标系的齐次变换矩阵。由即可解出点e1在基座标系{b1}中的位姿矢量
b1
e1,经逆运动学后驱动主焊接机器人运动。
[0044]
步骤8:将从焊接机器人理论焊接轨迹输入给从焊接机器人。根据主从机器人镜像同步运动的约束条件可以求得从焊接机器人法兰坐标系{e2}相对基座标系{b2}的齐次变换矩阵为由即可解出从焊接机器人法兰坐标系原点e2在基座标系{b2}中的位姿矢量
b2
e2,经逆运动学后驱动从焊接机器人运动。
[0045]
步骤9:在线实时监测主从机器人焊接过程的变形误差,并实时进行主从焊接机器人运动轨迹误差补偿。运动轨迹误差补偿与理论焊接轨迹并行输入到机器人控制器,驱动主从搅拌摩擦焊接装备镜像同步运动。
[0046]
以上所述的实施例仅用于说明本发明的技术思想及特点,其目的在于使本领域内的技术人员能够理解本发明的内容并据以实施,不能仅以本实施例来限定本发明的专利范围,即凡本发明所揭示的精神所作的同等变化或修饰,仍落在本发明的专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1