电机转子叠片加工设备及固定方法与流程
1.本发明属于电机生产设备领域,具体是电机转子叠片加工设备及固定方法。
背景技术:
2.现有电机转子的磁轭叠片的外形加工是毛坯片冲压制成,使用冲压工艺对毛坯片冲压存在易开裂的问题,而且直接冲压出来的毛坯片边缘存在毛刺,需要再进行一道去毛刺的工艺,存在加工效率低的问题,而其去毛刺的工艺还容易造成磁轭叠片损伤导致良品率降低的问题,因此需要提供一种能够减少加工步骤以提高加工效率,以及提高良品率的磁轭叠片的加工设备。
技术实现要素:
3.发明目的:提供电机转子叠片加工设备及固定方法,以解决现有技术存在的上述问题。
4.技术方案:电机转子叠片加工设备,用于将毛坯片加工成转子叠片。
5.该加工设备包括:线切割装置。
6.固定装置,设置在线切割装置内。
7.所述固定装置将毛坯片固定在预定位置,所述线切割装置将固定在预定位置的毛坯片线切割成预定形状。
8.在进一步的实施例中,加工设备还包括:进料机器人,设置在固定装置的进料端。
9.进料夹爪,与进料机器人连接。
10.所述进料夹爪夹持毛坯片的预定位置,所述进料机器人将毛坯片放置在固定装置的预定位置。
11.在进一步的实施例中,加工设备还包括:出料机器人,设置在固定装置的出料端。
12.出料夹爪,与出料机器人连接。
13.所述出料夹爪依次夹持转子叠片和废料,所述出料机器人依次将转子叠片和废料从线切割装置和固定装置输送到预定位置。
14.在进一步的实施例中,所述固定装置包括:基座。
15.至少四个支杆,设置在基座的四角处。
16.顶板,设置在支杆远离基座的一端。
17.直线驱动组件,与顶板连接。
18.至少两个夹板,靠近顶板的夹板与直线驱动组件连接。
19.所述直线驱动组件驱动夹板在基座和顶板之间沿支杆做往复位移。
20.在进一步的实施例中,所述顶板、基座和夹板开设有与转子叠片外壁相配合的切割孔。
21.所述线切割装置的切割线穿过切割孔对毛坯片进行切割。
22.在进一步的实施例中,所述固定装置包括:至少三个夹板,与支杆滑动连接,并沿
支杆的延伸方向位移。
23.复位组件,与夹板连接,使夹板间距相等,通过至少三个夹板能够一次线切割多个转子叠片,一次加工成型的转子叠片其精度也相同,因此其叠压转子时转子外形规整符合转子合格要求,解决了转子不合格无法使用的问题,而且通过夹板的间隔还能够避免线切割时转子叠片边缘融化粘连的问题。
24.在进一步的实施例中,所述复位组件包括:多级伸缩缸,与基座连接。
25.连接架,与多级伸缩缸和夹板连接。
26.所述多级伸缩缸的级数和连接架的数量与夹板的数量相配合,通过多级伸缩缸的升起能够实现夹板升起复位到预定位置,保证夹板的间距,能够通过舵机伸缩缸的收缩来保证夹板对转子叠片的夹紧。
27.在进一步的实施例中,所述复位组件包括:至少两个多级伸缩缸,每增加一个多级伸缩缸,其基底高度递增,通过多个多级伸缩缸能够减少单个多级伸缩缸的级数,进而降低其缸径和重量,降低了对基座的连接强度要求,进而降低了生产成本,缩短了生产周期。
28.在进一步的实施例中,所述固定装置还包括:定位件,与夹板的外壁底端连接。
29.所述夹板的外壁顶端形状与定位件凹凸配合。
30.所述定位件的内壁与毛坯片的外壁形状相配合。
31.所述定位件靠近夹板中心轴的一侧末端设置有定位倒角,通过定位件的定位倒角能够将已放置的毛坯片且位移出加工局域外的毛坯片推至加工区域内以保证加工精度。
32.基于电机转子叠片加工设备的固定方法包括:s1. 进料机器人带动进料夹爪夹持毛坯片,并将其放置在固定装置的夹板预定位置,每两个夹板之间放置一个毛坯片。
33.s2. 固定装置内放置的毛坯片达到预定数量时,直线驱动组件和复位组件带动夹板沿支杆的延伸方向向基座方向位移。
34.s3. 在夹板沿支杆的延伸方向向基座方向位移的过程中,当毛坯片的放置位置未满足其加工要求时,定位件的定位倒角与毛坯片抵接并将其限定在预定位置以满足加工精度要求。
35.s4. 当夹板都位移至预定位置时,线切割装置将固定在预定位置的毛坯片线切割成预定的转子叠片形状。
36.s5. 毛坯片加工成转子叠片后,出料机器人带动出料夹爪依次将转子叠片和废料从线切割装置和固定装置输送到预定位置。
37.有益效果:本发明公开了电机转子叠片加工设备及固定方法,通过将毛坯片输送到固定装置的预定位置进行固定后,再使用线切割的方法将毛坯片线切割成预定的转子叠片形状,使用线切割加工的转子叠片没有对叠片施加过高的压力解决了毛坯片在冲压工艺中开裂的问题,而且线切割生产的转子叠片没有毛刺,不需要进行去毛刺工艺,所以减少了加工步骤提高了加工效率并提高了良品率。
附图说明
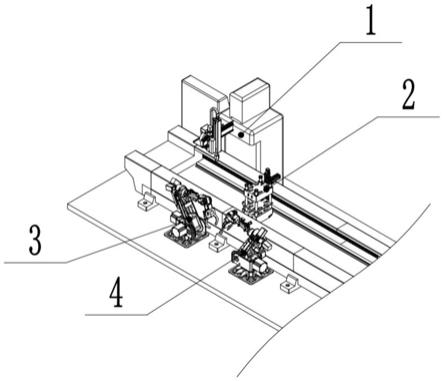
38.图1是本发明的装配示意图。
39.图2是本发明的固定组件示意图。
40.图3是本发明的夹板局部剖视及其与复位组件连接示意图。
41.图4是本发明的夹板仰视示意图。
42.图1至图4所示附图标记为:线切割装置1、固定装置2、进料机器人3、出料机器人4、基座21、支杆22、顶板23、直线驱动组件24、夹板25、复位组件26、定位件27、多级伸缩缸261、连接架262。
具体实施方式
43.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
44.本技术公开了一种用于将毛坯片加工成转子叠片的电机转子叠片加工设备,该加工设备能够通过减少加工步骤,提高加工效率和良品率。
45.该加工设备包括:线切割装置1、固定装置2、进料机器人3和出料机器人4。
46.线切割装置1可以是激光切割,也可以是电火花切割。
47.固定装置2设置在线切割装置1内,至少有一个固定装置2,当固定装置2的数量大于等于两个时,线切割装置1可以设置长导轨床身,固定装置2沿长导轨床身的延伸方向排列,使线切割装置1可以在固定装置2上下料的过程中,对其他任意一个已经完成上料的固定装置2进行线切割加工。
48.进料机器人3设置在固定装置2的进料端。
49.进料机器人3的端部安装有进料夹爪。
50.出料机器人4设置在固定装置2的出料端。
51.出料机器人4的端部安装有出料夹爪。
52.工作原理:在上料时,进料夹爪夹持毛坯片的预定位置,进料机器人3将毛坯片放置在固定装置2的预定位置。
53.完成上料后,通过将毛坯片输送到固定装置2的预定位置进行固定后,再使用线切割的方法将毛坯片线切割成预定的转子叠片形状,使用线切割加工的转子叠片没有对叠片施加过高的压力解决了毛坯片在冲压工艺中开裂的问题,而且线切割生产的转子叠片没有毛刺,不需要进行去毛刺工艺,所以减少了加工步骤提高了加工效率并提高了良品率。
54.完成线切割加工后,出料夹爪依次夹持转子叠片和废料,出料机器人4依次将转子叠片和废料从线切割装置1和固定装置2输送到预定位置。
55.在本实施例中,固定装置2包括:基座21、支杆22、顶板23和直线驱动组件24。
56.至少四个支杆22设置在基座21的四角处。
57.顶板23设置在支杆22远离基座21的一端。
58.直线驱动组件24与顶板23连接,其中直线驱动组件24可以是滚珠丝杠机构也可以是液压缸。
59.至少两个夹板25,其中靠近顶板23的夹板25与直线驱动组件24连接,如图1和2所示的实施例中,设置有三个夹板25,靠近顶板23的夹板25与顶板23固定连接,靠近基座21的夹板25与基座21固定连接,通过夹板25与顶板23的固定连接实现夹板25与直线驱动组件24的连接。
60.直线驱动组件24驱动夹板25在基座21和顶板23之间沿支杆22做往复位移,通过直线驱动组件24的驱动位移改变夹板25之间的间距。
61.在图1和2所示的实施例中,支杆22是与基座21固定连接的直线轴,夹板25和顶板23与支杆22滑动连接,通过支杆22的固定间距避免了夹板25和顶板23位移过程中的倾斜问题。
62.在本实施例中,顶板23、基座21和夹板25开设有与转子叠片外壁相配合的切割孔。
63.线切割装置1的激光切割线或电火花切割线穿过切割孔对毛坯片进行切割。
64.如图4所示的网格部分是切割孔示意图,切割孔面积大于毛坯片的切割面积。
65.在进一步的实施例中,使用线切割工艺与冲压工艺相比存在线切割时存在切割线位移误差,容易出现转子叠片外形精度不相符导致叠压转子时转子外形不规整,不符合转子合格要求导致无法使用的问题。
66.为了解决上述问题,固定装置2包括:复位组件26、以及至少三个夹板25。
67.夹板25与支杆22滑动连接,并沿支杆22的延伸方向位移。
68.复位组件26,与夹板25连接,使夹板25间距相等。
69.通过至少三个夹板25能够一次线切割多个转子叠片,一次加工成型的转子叠片其精度也相同,因此其叠压转子时转子外形规整符合转子合格要求,解决了转子不合格无法使用的问题。
70.而且通过夹板25的间隔还能够避免线切割时转子叠片边缘融化粘连的问题。
71.在进一步的实施例中,现有复位组件26大都是使用弹簧实现复位,由于转子叠片的片状件,所以需要弹簧被压缩后的高度小于5mm,这样的弹簧存在行程小、弹力小无法在取件时将夹板25的间距支撑到预定距离,存在无法完成取件工作的问题。
72.为了解决上述问题,复位组件26包括:多级伸缩缸261和连接架262。
73.多级伸缩缸261与基座21连接。
74.连接架262与多级伸缩缸261和夹板25连接。
75.多级伸缩缸261的级数和连接架262的数量与夹板25的数量相配合。
76.通过多级伸缩缸261的升起能够实现夹板25升起复位到预定位置,保证夹板25的间距,能够通过舵机伸缩缸的收缩来保证夹板25对转子叠片的夹紧。
77.在进一步的实施例中,多级伸缩缸261的级数越多其缸径越大,其级数增加到预定值时生产成本的增加甚至多于一个伸缩缸的生产成本,单个多级伸缩缸261的缸径越大,其重量也越大,对基座21的连接强度要求越高,存在生产成本过高和生产周期过长的问题。
78.为了解决上述问题,复位组件26包括:至少两个多级伸缩缸261,每增加一个多级伸缩缸261,其基底高度递增,其中递增的高度是一个夹板25的高度。
79.通过多个多级伸缩缸261能够减少单个多级伸缩缸261的级数,进而降低其缸径和重量,降低了对基座21的连接强度要求,进而降低了生产成本,缩短了生产周期。
80.在进一步的实施例中,本技术夹板25需要定位的是毛坯片,是薄板件,而为了线切割加工的效率需要毛坯片的数量达到预定值时在进行加工,在毛坯片放置的过程中存在已放置的毛坯片位移的问题。
81.为了解决上述问题,固定装置2还包括:定位件27。
82.定位件27与夹板25的外壁底端连接,夹板25的外壁顶端形状与定位件27凹凸配
合,定位件27的内壁与毛坯片的外壁形状相配合,定位件27靠近夹板25中心轴的一侧末端设置有定位倒角。
83.如图3和4所示定位件27是定位环,毛坯片收容在定位环内。
84.通过定位件27的定位倒角能够将已放置的毛坯片且位移出加工局域外的毛坯片推至加工区域内以保证加工精度。
85.基于电机转子叠片加工设备的固定方法包括:s1. 进料机器人3带动进料夹爪夹持毛坯片,并将其放置在固定装置2的夹板25预定位置,每两个夹板25之间放置一个毛坯片。
86.s2. 固定装置2内放置的毛坯片达到预定数量时,直线驱动组件24和复位组件26带动夹板25沿支杆22的延伸方向向基座21方向位移。
87.s3. 在夹板25沿支杆22的延伸方向向基座21方向位移的过程中,当毛坯片的放置位置未满足其加工要求时,定位件27的定位倒角与毛坯片抵接并将其限定在预定位置以满足加工精度要求。
88.s4. 当夹板25都位移至预定位置时,线切割装置1将固定在预定位置的毛坯片线切割成预定的转子叠片形状。
89.s5. 毛坯片加工成转子叠片后,出料机器人4带动出料夹爪依次将转子叠片和废料从线切割装置1和固定装置2输送到预定位置。
90.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1