门开闭装置和机床的制作方法
1.本发明涉及门开闭装置和机床。
背景技术:
2.为了抑制门在与干扰物碰撞时干扰物发生破损,存在使门从门的驱动部脱离的门开闭装置。日本国特许公开1995年第171732号公报所记载的机床具备自动门、动作部和轴构件(日文:
スピンドル
)。自动门通过从动作部传递来的驱动力沿水平方向直线运动。轴构件平时将自动门夹紧于动作部,将动作部的驱动力传递至自动门。例如,当自动门与干扰物碰撞且预定以上的大小的负荷作用于自动门时,轴构件向上方摆动。当轴构件向上方摆动时,自动门与动作部之间的夹紧被解除,从动作部向自动门的驱动力的传递中断。
3.在上述机床中,轴构件的摆动方向(上下方向)与自动门的开闭方向(水平方向)正交。因此,对于机床,除了需要确保自动门的移动区域之外,还需要确保轴构件的移动区域。因此,机床存在装置在轴构件的摆动方向上大型化的可能性。
技术实现要素:
4.发明要解决的问题
5.本发明的目的在于,提供能够抑制装置的大型化的门开闭装置和机床。
6.用于解决问题的方案
7.技术方案1的门开闭装置的特征在于,该门开闭装置具备:门,其能够开闭;驱动部,其使门进行开闭;以及脱离部,其能够变动成使门与驱动部连结的连结状态和使门从驱动部脱离的脱离状态,脱离部具备:键,其固定于驱动部和门中的一者;以及接收部,其固定于驱动部和门中的另一者,键从门的开闭方向中的一方向嵌于该接收部,键具有第一凹部,该第一凹部向作为与开闭方向交叉的相对方向中的一方向的第一相对方向凹陷,接收部具备:支承部;第一相对部,其由支承部支承,且能够沿相对方向移动;以及第一施力部,其对第一相对部向第一相对方向施力,在脱离部处于连结状态时,第一相对部位于第一凹部内,在脱离部处于脱离状态时,第一相对部位于第一凹部外。
8.键相对于接收部移动的方向是与开闭方向相同的方向。因此,门开闭装置不必在与开闭方向交叉的方向上确保键的移动区域,能够抑制装置的大型化。
9.也可以是,技术方案2的门开闭装置的键固定于驱动部,接收部固定于门。键嵌于接收部中,因此,键整体比接收部小。在门开闭装置中,将键固定于驱动部。因此,与将接收部固定于驱动部时相比,固定于驱动部的构件变小。在门开闭装置中防止如下情况:当在门的移动过程中脱离部成为脱离状态时,固定于驱动部的构件与门碰撞。
10.也可以是,技术方案3的门开闭装置具备第一固定部,该第一固定部以能够相对于门沿相对方向调整接收部的方式固定该接收部。此时,在门开闭装置中,利用第一固定部来调整接收部相对于门的相对方向位置,能够调整接收部相对于键的相对方向位置。
11.也可以是,技术方案4的门开闭装置具备第二固定部,该第二固定部以能够相对于
门沿与开闭方向和相对方向均交叉的交叉方向调整接收部的方式固定该接收部。此时,在门开闭装置中,利用第二固定部来调整接收部相对于门的交叉方向位置,能够调整接收部相对于键的交叉方向位置。
12.也可以是,技术方案5的门开闭装置的键具有向与第一相对方向相反的第二相对方向凹陷的第二凹部,接收部还具备:第二相对部,其由支承部支承,且该第二相对部相对于第一相对部设于第一相对方向侧;以及第二施力部,其对第二相对部向第二相对方向施力,在脱离部处于连结状态时,第一相对部位于第一凹部内,且第二相对部位于第二凹部内,在脱离部处于脱离状态时,第一相对部位于第一凹部外,且第二相对部位于第二凹部外。此时,在连结状态下,第一相对部和第二相对部在键的相对方向的两侧嵌于第一凹部、第二凹部。因此,驱动部与门的连结稳定。
13.也可以是,技术方案6的门开闭装置的接收部具备:第一杆,其沿开闭方向延伸,与第一相对部连接;第一摆动轴,其设于第一杆中的与第一相对部不同的位置,将第一杆支承为能够摆动;第二杆,其沿开闭方向延伸,与第二相对部连接;以及第二摆动轴,其设于第二杆中的与第二相对部不同的位置,将第二杆支承为能够摆动,第一施力部和第二施力部是一个施力构件,该施力构件设于第一按压部与第二按压部之间,对第一按压部向第二相对方向施力,且对第二按压部向第一相对方向施力,该第一按压部位于第一杆中的相对于第一摆动轴而言与第一相对部相反的一侧,该第二按压部位于第二杆中的相对于第二摆动轴而言与第二相对部相反的一侧。此时,门开闭装置利用一个施力构件对第一相对部和第二相对部这两者向键施力。因此,在门开闭装置中,第一施力部和第二施力部能够通过一个施力构件共用。
14.也可以是,技术方案7的门开闭装置的开闭方向和相对方向分别是与铅垂方向交叉的方向。此时,键的移动方向与铅垂方向交叉,且键和第一相对部在与铅垂方向交叉的方向上排列。因此,第一相对部不必为了自第一凹部脱离去克服重力。在预定以上的大小的力作用于第一相对部时,第一相对部稳定地自第一凹部脱离。
15.技术方案8的机床的特征在于,该机床具备技术方案1至7中任一项所述的门开闭装置。机床获得与门开闭装置相同的效果。
附图说明
16.图1是从右前上方观察机床1的立体图。
17.图2是局部地表示截面的机床1的主视图。
18.图3是从左后下方观察护罩3的前表面的立体图。
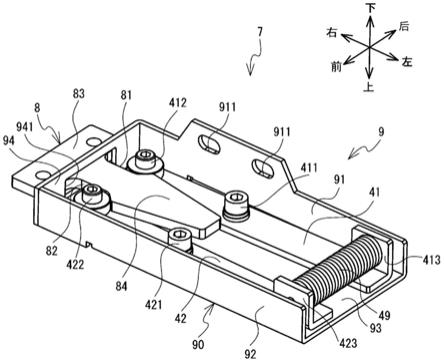
19.图4是从左前下方观察脱离部7的立体图。
20.图5是表示脱离部7的动作的说明图。
21.图6是从右前下方观察脱离部71的立体图。
22.图7是从右前下方观察脱离部72的立体图。
23.图8是从右前下方观察脱离部73的立体图。
具体实施方式
24.说明本发明的一个实施方式。在以下说明中,使用在图中箭头所示的左右、前后、
上下。在本实施方式中,上下方向是铅垂方向。参照图1来说明机床1的概略结构。机床1是车床、钻床、镗床、铣床、切齿机、磨床、放电加工机、激光加工机等,对金属、木材、石材、树脂等工件进行切断、开孔、切削、磨削、研磨、锻造、折弯、冲压等各种加工。
25.机床1具备机床主体2、护罩3和门开闭装置4。机床主体2具备可动部20,通过可动部20的驱动来进行工件的加工。护罩3包围可动部20周围。护罩3的前表面具有开口31。作业人员或作业机器人经由开口31相对于机床主体2来拆装工件。门开闭装置4以确保作业人员的安全等为目的安装于护罩3。
26.参照图2、图3来说明门开闭装置4。如图2那样,门开闭装置4具备门5、驱动部6和脱离部7。门5配置于护罩3的前表面,门5由左门51和右门52构成。左门51和右门52沿左右方向排列。开口31的上端支承左门51和右门52。左门51在比开口31的左右方向中心靠左侧的范围内沿左右方向往复移动。右门52在比开口31的左右方向中心靠右侧的范围内沿左右方向往复移动。即,门5的开闭方向是左右方向。
27.如图3那样,左门51和右门52通过金属丝53相互连结。金属丝53在俯视时呈沿左右方向延伸的环状。金属丝53中的位于前侧的部位531固定于左门51。金属丝53中的位于后侧的部位532固定于右门52。因此,当左门51向左方移动时,通过金属丝53的俯视顺时针方向的旋转,右门52从动于左门51的动作向右方移动。即,随着左门51的移动,左门51和右门52向相互远离的方向移动。当左门51向右方移动时,通过金属丝53的俯视逆时针方向的旋转,右门52从动于左门51的动作向左方移动。即,随着左门51的移动,左门51和右门52向相互接近的方向移动。
28.采用上述结构,左门51和右门52向相互远离的方向或相互接近的方向移动,从而门5能够在打开位置(参照图1)与关闭位置(参照图2、图3)之间移动。如图1那样,在门5位于打开位置时,左门51位于开口31的左侧,使开口31的左半部分敞开,且右门52位于开口31的右侧,使开口31的右半部分敞开。因此,门5使整个开口31敞开。如图2、图3那样,在门5位于关闭位置时,左门51覆盖开口31的左半部分,且右门52覆盖开口31的右半部分。因此,门5覆盖整个开口31。
29.如图2那样,驱动部6具备马达61和皮带62,使左门51沿左右方向往复移动。马达61配置于左门51的上侧。马达61的旋转轴611从马达61向下方延伸。皮带62配置于左门51的上侧,俯视时呈沿左右方向延伸的环状。皮带62的右端被马达61的旋转轴611支承。护罩3在马达61的旋转轴611的左侧具备支承轴311。皮带62的左端被护罩3的支承轴311支承。因此,通过马达61的驱动,从而皮带62在马达61的旋转轴611与支承轴311之间旋转。
30.在后述的脱离部7处于连结状态时,皮带62与左门51连结。此时,通过马达61向一方向的旋转驱动,从而皮带62旋转,左门51向左方移动,右门52从动于左门51向右方移动。因此,门5从关闭位置(参照图2、图3)移动至打开位置(参照图1)。以下,将此时的驱动部6的动作称作打开动作。通过马达61向另一方向的旋转驱动,从而皮带62旋转,左门51向右方移动,右门52从动于左门51向左方移动。因此,门5从打开位置(参照图1)移动至关闭位置(参照图2、图3)。以下,将此时的驱动部6的动作称作关闭动作。
31.参照图3、图4来说明脱离部7。如图4那样,脱离部7具备键8和接收部9。键8经由固定板64(参照图3)和固定构件(省略图示)固定于皮带62(参照图2)(省略图示)。固定板64固定于键8,从键8向上方延伸。固定构件从固定板64进一步向上方延伸,固定于皮带62。键8由
金属板形成,沿前后左右延伸。键8具有凹部81、82。凹部81位于键8的左右方向中央部,从键8的后端向前方凹陷。凹部82位于键8的左右方向中央部,从键8的前端向后方凹陷。
32.以下,将键8中的凹部81、82的右侧称作基端部83,将键8中的凹部81、82的左侧称作锥形部84。基端部83具有在俯视时呈矩形的形状。锥形部84的后端向左斜前方倾斜,锥形部84的前端向左斜后方倾斜。
33.接收部9具备支承部90。支承部90由金属板形成,借助后述的固定部11、16固定于左门51的上部(参照图2、图3)。支承部90向下方和左方开口,具有后表面91、前表面92、上表面93和右表面94。后表面91和前表面92在前后方向上分开并彼此相对。后表面91在下端部具有两个长孔911。两个长孔911相互沿左右方向排列。上表面93从后表面91的上端延伸到前表面92的上端。
34.右表面94从后表面91的右端延伸到前表面92的右端。右表面94具有开口941。开口941的前后方向长度大于锥形部84的前后方向最大长度,且小于基端部83的前后方向最大长度。因此,当键8从右表面94的右侧插入开口941时,锥形部84在开口941之中穿过,但基端部83无法穿过开口941,而是抵靠于右表面94。
35.如图3那样,固定部11由金属板形成,具有第一部分12和第二部分13。第一部分12沿上下左右延伸。第一部分12具有两个长孔121。长孔121相互沿左右方向排列。第二部分13从第一部分12的上端向后方延伸。第二部分13具有两个长孔131。两个长孔131沿左右方向排列。固定部16由金属板形成,具有第一部分17和第二部分18。第一部分17沿前后左右延伸。第二部分18从第一部分17的后端向上方延伸。固定部11通过螺栓(省略图示)借助长孔121固定于左门51的上部。固定部16通过螺栓(省略图示)借助两个长孔131固定于固定部11。支承部90通过螺栓(省略图示)借助两个长孔911固定于固定部16。长孔121的上下方向长度长于长孔121的左右方向长度。因此,对于固定部11,能够调整其相对于左门51而言的上下方向位置,能够在调整后的位置处用螺栓进行固定。长孔131的前后方向长度长于长孔131的左右方向长度。因此,对于固定部16,能够调整其相对于固定部11而言的前后方向的位置,能够在调整后的位置处用螺栓进行固定。长孔911的左右方向长度长于长孔911的上下方向长度。因此,对于支承部90,能够调整其相对于固定部16而言的左右方向位置,能够在调整后的位置处用螺栓进行固定。由此,对于支承部90,能够相对于左门51调整支承部90的上下前后左右位置,能够在调整后的位置处进行固定。
36.如图4那样,支承部90支承杆41、42。杆41由金属板形成,在支承部90的后部沿左右方向延伸。杆41能够以摆动轴411为中心摆动。摆动轴411从支承部90的上表面93向下方延伸,贯穿杆41的左右方向大致中央。杆41的右端部支承相对部412。相对部412是辊。相对部412的旋转中心沿上下方向延伸。杆42由金属板形成,在支承部90的前部沿左右方向延伸。杆42能够以摆动轴421为中心摆动。摆动轴421从支承部90的上表面93向下方延伸,贯穿杆42的左右方向大致中央。杆42的右端部支承相对部422。相对部422是辊。相对部422的旋转中心沿上下方向延伸。
37.杆41的左端部具有按压部413。杆42的左端部具有按压部423。按压部413、423在彼此之间支承施力构件49。施力构件49是螺旋压缩弹簧,以在前后方向上压缩变形了的状态进行安装。因此,施力构件49始终对按压部413向后方施力,且始终对按压部423向前方施力。此时,对于杆41,以使杆41的右端部以摆动轴411为中心向前方摆动的方式作用有施力
构件49的施力。对于杆42,以使杆42的右端部以摆动轴421为中心向后方摆动的方式作用有施力构件49的施力。即,施力构件49始终向使相对部412、422相互接近的方向施力。
38.采用上述结构,如以下说明那样,脱离部7能够变动成使门5与驱动部6连结的状态(以下,称为连结状态。)和使门5从驱动部6脱离的状态(以下,称为脱离状态。)。
39.参照图5来说明从连结状态向脱离状态变动时的脱离部7的动作。如图5的(a)那样,在脱离部7处于连结状态时,键8经由支承部90的右表面94的开口941嵌于接收部9。此时,相对部412位于凹部81内,相对部422位于凹部82内。凹部81、82内是指,由凹部81、82围成的区域。施力构件49始终向使相对部412、422相互接近的方向施力。因此,相对部412、422在凹部81、82的位置处相互夹持键8。因此,来自驱动部6的动力从键8经由接收部9传递至门5。
40.如图5的(b)那样,有时向右方的预定以上的大小的力作用于键8或有时向左方的预定以上的大小的力作用于接收部9。此时,相对部412克服由施力构件49的向前方的施力引起的、与键8之间的摩擦,相对于键8向左方移动。相对部422克服由施力构件49的向后方的施力引起的、与键8之间的摩擦,相对于键8向左方移动。
41.如图5的(c)那样,相对部412沿着凹部81的壁部移动,自凹部81向左方脱离。相对部422沿着凹部82的壁部移动,自凹部82向左方脱离。此时,杆41以摆动轴411为中心沿仰视时的顺时针方向旋转。杆42以摆动轴421为中心沿仰视时的逆时针方向旋转。相对部412、422自凹部81、82脱离时所需的力的大小大于在驱动部6的关闭动作时作用于键8的力的大小。
42.如图5的(d)那样,相对部412沿着锥形部84的后端相对于键8向左方移动。相对部422沿着锥形部84的前端相对于键8向左方移动。
43.如图5的(e)那样,键8经由开口941向右方从接收部9完全脱出。因此,来自驱动部6的动力不会从键8传递至接收部9,因此,动力未传递至门5。脱离部7成为脱离状态。即,在脱离部7处于脱离状态时,相对部412位于凹部81外,相对部422位于凹部82外。
44.说明从脱离状态向连结状态变动时的脱离部7的动作。在脱离部7处于脱离状态时(参照图5的(e)),作业人员通过手动使门5朝向关闭位置(参照图2、图3)移动。支承部90朝向键8移动,键8经由支承部90的开口941进入支承部90中。或者是,在脱离部7处于脱离状态时(参照图5的(e)),若驱动部6执行打开动作,则键8朝向支承部90移动,键8经由支承部90的开口941进入支承部90中。相对部412、422沿着锥形部84相对于键8向右方相对移动,嵌于凹部81、82。因此,脱离部7从脱离状态(参照图5的(e))恢复至连结状态(参照图5的(a))。相对部412、422沿着锥形部84移动并嵌于凹部81、82所需的力的大小小于上述预定大小的力。即,由于键8具有锥形部84,因此,脱离部7能够容易地从脱离状态(参照图5的(e))恢复至连结状态(参照图5的(a))。
45.说明驱动部6的打开动作时的各构件的动作方式。如图5的(a)那样,通常,脱离部7处于连结状态。在脱离部7处于连结状态的状态下进行驱动部6的打开动作时,键8受到向左方去的力。因此,键8的基端部83向左方按压支承部90的右表面94。由于键8的基端部83始终向左方持续按压支承部90的右表面94,因此,原则上脱离部7不会从连结状态变动成脱离状态。因此,向左方的力经由连结状态的脱离部7也作用于左门51(参照图2、图3),左门51向左方移动。与此相伴,右门52(参照图2、图3)向右方移动,门5从关闭位置(参照图2、图3)移动
至打开位置(参照图1)。
46.说明驱动部6的关闭动作时的各构件的动作方式。如图5的(a)那样,在脱离部7处于连结状态的状态下进行驱动部6的关闭动作时,键8受到向右方去的力。如上述那样,相对部412、422自凹部81、82脱离时所需的力的大小大于在驱动部6的关闭动作时作用于键8的力的大小。因此,原则上脱离部7不会因驱动部6的关闭动作从连结状态变动成脱离状态。左门51(参照图1)经由连结状态的脱离部7受到向右方的力,左门51向右方移动。与此相伴,右门52(参照图1)向左方移动,门5从打开位置(参照图1)移动至关闭位置(参照图2、图3)。
47.例如在驱动部6的关闭动作中,即在门5从打开位置(参照图1)向关闭位置(参照图2、图3)移动的过程中,有时在开口31内存在碰撞物。此时,若左门51或右门52与碰撞物碰撞,则向左方的力作用于接收部9。若该力的大小为预定以上的大小的力,则脱离部7从连结状态(参照图5的(a))变动成脱离状态(参照图5的(e)),来自驱动部6的动力不会再传递至左门51。左门51在惯性的作用下向右方移动之后停止。与此相伴,右门52也在向左方移动之后停止。因此,与脱离部7维持连结状态时相比,对于碰撞物的冲击变小,门开闭装置4能够抑制碰撞物的破损等。
48.如以上说明那样,键8相对于接收部9移动的方向是与门5的开闭方向(左右方向)相同的方向。因此,门开闭装置4不必在与左右方向交叉的方向上确保键8的移动区域,因此,门开闭装置4能够抑制装置的大型化。
49.当在驱动部6的关闭动作中脱离部7从连结状态变动成脱离状态时,由于门5脱离驱动部6,因此,门5的移动停止。但是,驱动部6的驱动不会因脱离部7的状态变动停止。因此,固定于驱动部6的构件(在本实施方式中为键8)会继续移动。此时,固定于驱动部6的构件有可能与门5发生干扰。在本实施方式中,键8嵌于接收部9中。因此,键8整体比接收部9小。在门开闭装置4中,将键8固定于驱动部6,将接收部9固定于门5。因此,与将接收部9固定于驱动部6时相比,固定于驱动部6的构件变小。因此,在门开闭装置4中能够抑制如下情况:当在驱动部6的关闭动作中脱离部7成为脱离状态时,固定于驱动部6的构件与门5发生干扰。
50.若假设接收部9相对于键8的前后方向位置发生偏移,则键8有可能无法从支承部90的开口941脱出。固定部11、16以能够相对于门5沿前后方向调整接收部9的方式固定该接收部9。因此,在门开闭装置4中,能够调整接收部9相对于键8的前后方向位置,且能够减少键8无法从支承部90的开口941脱出的可能性。
51.若假设接收部9相对于键8的上下方向位置发生偏移,则相对部412、422有可能无法按压键8。固定部11、16以能够相对于门5沿上下方向调整接收部9的方式固定该接收部9。因此,在门开闭装置4中,能够调整接收部9相对于键8的上下方向位置,且能够减少无法利用相对部412、422来按压键8的可能性。
52.在连结状态下,相对部412、422从前后两方夹持键8。因此,驱动部6与门5的连结稳定,在门开闭装置4中,能够稳定地执行门5的开闭动作。
53.杆41、42沿左右方向延伸,并与相对部412、422连接。摆动轴411、421配置于杆41、42中的与相对部412、422不同的位置,将杆41、42支承为能够摆动。按压部413、423位于杆41、42中的、相对于摆动轴411、421而言与相对部412、422相反的一侧。施力构件49配置于按压部413、423之间。施力构件49对按压部413向后方施力,且对按压部423向前方施力。因此,
能利用一个施力构件49使相对部412、422这两者向键8施力,由此,门开闭装置4能够廉价地制造出来。
54.键8的移动方向与铅垂方向交叉,且键8和相对部412、422在与铅垂方向交叉的方向上排列。因此,相对部412、422不必为了自凹部81、82脱离去克服重力,因此,在预定以上的大小的力作用于相对部412、422时,相对部412、422能够稳定地自凹部81、82脱离。
55.机床1具备门开闭装置4。因此,机床1具有与门开闭装置4相同的效果。
56.本发明能够相对于上述实施方式进行变更。例如,也可以是,作为第一变形例,门开闭装置4具备脱离部71来替代脱离部7,作为第二变形例,门开闭装置4具备脱离部72来替代脱离部7,作为第三变形例,门开闭装置4具备脱离部73来替代脱离部7。
57.参照图6来说明脱离部71。对于具有与上述实施方式的脱离部7同等形状的构件,标注与脱离部7的构件相同的附图标记并省略或简化说明(后述的脱离部72、73也是同样的)。
58.脱离部71具备键8和接收部901。键8是与上述实施方式相同的结构。接收部901具有前后相对于通过俯视时前后方向的中心的线(对称轴线)呈大致线对称的结构。因此,说明接收部901中的比对称轴线靠后侧的结构。
59.接收部901的支承部90支承杆4101。杆4101位于支承部90的后部,沿左右方向延伸。杆4101在其左右方向中央部具有相对部4121。相对部4121从杆4101向前方突出。支承部90的后表面91支承两个引导轴4111和施力构件491。两个引导轴4111沿前后方向延伸,贯穿杆4101的左部和右部。因此,杆4101能够沿着两个引导轴4111在前后方向上移动。施力构件491是螺旋压缩弹簧,位于两个引导轴4111之间。施力构件491以在前后方向上压缩变形了的状态在支承部90的后表面91与杆4101之间沿前后方向延伸。因此,施力构件491始终对杆4101向前方施力。
60.采用上述结构,与脱离部7同样地,脱离部71能够变动成连结状态和脱离状态。即,通过相对部4121嵌于凹部81,从而脱离部71成为连结状态。此时,在施力构件491的施力的作用下,相对部4121向前方按压凹部81。当在驱动部6的关闭动作中向左方的预定以上的大小的力作用于支承部90时,键8会相对于接收部901向右方移动,相对部4121自凹部81向左方脱离。因此,脱离部71成为脱离状态。
61.参照图7来说明脱离部72。脱离部72具备键8和接收部902。键8是与上述实施方式相同的结构。接收部902具有前后相对于通过俯视时前后方向的中心的线(对称轴线)呈大致线对称的结构。因此,说明接收部902中的比对称轴线靠后侧的结构。
62.接收部902的支承部90支承杆4102。杆4102位于支承部90的后部,沿左右方向延伸。杆4102在其右端部具有相对部4122。相对部4122从杆4102向前方突出。杆4102能够以摆动轴4112为中心摆动。摆动轴4112从支承部90的上表面93向下方延伸,贯穿杆4102的左端部。
63.支承部90的后表面91支承施力构件492。施力构件492是螺旋压缩弹簧,以在前后方向上压缩变形了的状态在支承部90的后表面91与杆4102的左右方向的中央部之间沿前后方向延伸。因此,施力构件492始终对杆4102向前方施力。施力构件492所施力的位置是相对于摆动轴4112而言与相对部4122相同的一侧。也可以是,杆4102延伸到比相对部4122更靠右侧的部位,施力构件492对相对部4122的右侧的位置向前方施力。
64.采用上述结构,与脱离部7同样地,脱离部72能够变动成连结状态和脱离状态。即,通过相对部4122嵌于凹部81,从而脱离部72成为连结状态。此时,在施力构件492的施力的作用下,相对部4122向前方按压凹部81。当在驱动部6的关闭动作中向左方的预定以上的大小的力作用于支承部90时,键8会相对于接收部902向右方移动,相对部4122自凹部81向左方脱离。因此,脱离部72成为脱离状态。
65.参照图8来说明脱离部73。脱离部73具备键8和接收部903。键8是与上述实施方式相同的结构。接收部903在支承部90的上表面93的左端部具有块状物473。块状物473位于上表面93的前后方向中央。接收部903具备施力构件4913、4923。施力构件4913、4923是螺旋压缩弹簧。施力构件4913以在前后方向上压缩变形了的状态在块状物473与杆41的按压部413之间沿前后方向延伸。因此,施力构件4913始终对按压部413向后方施力。施力构件4923以在前后方向上压缩变形了的状态在块状物473与杆42的按压部423之间沿前后方向延伸。因此,施力构件4923始终对按压部423向前方施力。采用上述结构,与脱离部7同样地,脱离部73能够变动成连结状态和脱离状态。
66.以下,说明其他变形例。上述实施方式和各变形例若不产生矛盾,则能够分别组合地应用。例如,门开闭装置4也能够应用于将树脂成型机的可动部包围的护罩、将工业用机器人的可动部包围的护罩。
67.在上述实施方式中,门5也可以是单扇推拉门。门5可以沿上下方向移动从而在关闭位置与打开位置之间移动。也可以是,在护罩3的上表面形成开口,门5将护罩3的上表面的开口封堵。
68.也可以是,键8固定于左门51,接收部9固定于皮带62。键8也可以不借助固定板64和固定构件而是直接固定于皮带62。支承部90也可以不借助固定部11、16而是直接固定于左门51。
69.相对部412、422中的一者(例如相对部422)也可以无法沿前后方向移动。此时,相对部412相当于本发明的第一相对部,相对部422相当于本发明的第二相对部。在接收部9中,可以省略杆42、摆动轴421、相对部422。此时,在键8中,可以省略凹部82。在脱离部7处于连结状态时,基于施力构件49的、从相对部412施加于键8的施力由支承部90的前表面92承受。即,支承部90的前表面92相当于本发明的第二相对部。
70.在上述实施方式中,由金属板形成的构件(键8、支承部90等)也可以由塑料板、木板等形成。施力构件49并不限定于螺旋压缩弹簧,既可以是板簧等其他种类的弹簧,也可以是橡胶、海绵等弹性体。键8的形状并不限定于上述实施方式。例如,锥形部84的前后两端可以平行地延伸。也可以是,驱动部6利用工作缸等使门5移动,来替代马达61、皮带62。此时,键8和接收部9中的一者也可以固定于活塞杆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1