惯性摩擦焊机的制作方法
1.本发明涉及一种惯性摩擦焊机。
背景技术:
2.惯性摩擦焊是将飞轮旋转的动能转换为工件的摩擦变形能的焊接方式,主要用于焊接界面为圆形的工件。焊接过程中飞轮在工件界面摩擦的作用下转速逐渐降低并停止,飞轮停止转动的角度无法控制,目前主要用于轴类、盘类、鼓筒类等对两工件相对角度无要求的零件的焊接。
3.为解决旋转摩擦焊无法控制角度的问题,目前已有的可以控制的相位摩擦焊技术,其原理是通过连续驱动的电机施加动能,在焊接结束前通过机械式或电子式的方式控制相位,其中电子式相位控制的原理是通过电子信号控制变频器进行控制,机械式主要是通过定位销等方式控制。但目前该技术无法应用于大吨位航空发动机惯性摩擦焊零件的应用,其原因主要有以下三点:1)相位摩擦焊目前能够应用的摩擦焊吨位较小,采用定位销和电磁的方式无法在焊接将要结束时产生足够的扭矩扭转焊接工件;2)采用定位销的方式进行控制,除无法提供足够的约束力外,还会对零件产生冲击作用,从而可能导致焊接接头产生缺陷,且定位销控制精度无法达到理想效果,因为当定位销精度较高时工件在高速旋转过程中定位销无法及时插入,从而导致精度较差;3)采用电子控制的方式,尽管控制方式属于柔性控制,但是存在电磁信号延迟和电磁力的非刚性控制的现象,从而导致相位控制精度相比机械系统更差,且这种现象在大吨位上尤其明显。
4.航空发动机转子组件是由多级叶盘组成的整体结构,随着航空发动机性能指标的不断提高,对转子组件的整体重量、材料特性、尺寸精度、焊接精度提出了更高的要求。目前先进的航空发动机转子组件大量采用了钛合金、高温合金、粉末合金等材料,采用传统方法难以实现高强度、高性能的焊接。采用惯性摩擦焊是实现航空发动机转子叶盘高强度连接的重要技术,但是由于传统的惯性摩擦焊无法保证角向精度,因此现有工艺是通过惯性摩擦焊焊接盘轴零件,再安装叶片。为进一步提高发动机性能,降低发动机整体重量,目前发动机开始逐步使用整体叶盘代替分离式的叶片与盘结构。因此,开发能够进行角向精度控制的惯性摩擦焊技术显得尤为重要。
技术实现要素:
5.本发明要解决的技术问题是克服现有技术中惯性摩擦焊焊接转子叶盘时无法保证角向精度导致只能采用分离式叶盘结构的缺陷,提供一种惯性摩擦焊机。
6.本发明是通过下述技术方案来解决上述技术问题:
7.本发明公开了一种惯性摩擦焊机,包括旋转端和移动端,所述旋转端用于装夹旋转工件,所述移动端用于装夹移动工件,所述惯性摩擦焊机还包括第一定位夹具和第二定位夹具,所述第一定位夹具设于所述旋转端,所述第一定位夹具被设置成与所述旋转端同步转动且只能沿所述旋转工件的轴向移动,所述第二定位夹具设于所述移动端且被设置成
只能沿所述移动工件的轴向移动;
8.所述第一定位夹具远离所述移动端的一侧设有弹性件,所述弹性件用于对所述第一定位夹具施加朝所述移动端方向移动的力;
9.所述第一定位夹具朝向所述第二定位夹具的端面具有在周向上按照预设角度间隔设置的多个第一凹槽,所述第二定位夹具上设有与所述第一凹槽相适配的第二凸起,所述旋转端转动时,所述第二凸起能从一个所述第一凹槽进入另外一个所述第一凹槽;
10.和/或,所述第二定位夹具朝向所述第一定位夹具的端面具有在周向上按照预设角度间隔设置的多个第二凹槽,所述第一定位夹具上设有与所述第二凹槽相适配的第一凸起,所述旋转端转动时,所述第一凸起能从一个所述第二凹槽进入另外一个所述第二凹槽。
11.在本方案中,惯性摩擦焊机采用上述结构,在焊接发动机的转子叶盘和转轴时,通过确定两个焊接工件在焊接结束后的角向位置预先调整第一定位夹具和第二定位夹具的相对位置,在工件焊接的顶锻保压阶段后期旋转端转速较小时,通过第一定位夹具和第二定位夹具接触并产生摩擦并且在弹性件的作用下,第二凸起在第一凹槽之间运动和/或第一凸起在第二凹槽之间运动,不断降低旋转端的转速,当旋转端速度较低时,旋转端的惯性无法使第二凸起从一个第一凹槽进入下一个第一凹槽中或第一凸起从一个第二凹槽进入下一个第二凹槽中,此时在第一定位夹具和第二定位夹具所产生的附加扭矩下,旋转端开始做反向运动并进行运动幅度不断降低的钟摆运动并降低转速,最终使得第一凹槽与第二凸起咬合和/或第二凹槽与第一凸起咬合结束旋转,从而使得转子叶盘上的叶片与转轴上预设位置的角度与预设角度一致,保证了角向位置控制的精度,进而可以焊接带有叶片的整体叶盘与转轴并保证整体叶盘与转轴的角向位置,提高发动机性能,降低发动机整体重量。并且该惯性摩擦焊机采用纯机械的方式进行控制,无电子控制的延迟效应,保证了焊接角向控制的稳定性和可靠性。
12.较佳地,两个相邻所述第一凹槽之间形成第一凸起,两个相邻所述第二凹槽之间形成第二凸起,所述第一凸起和所述第二凸起的结构大小相同。
13.在本方案中,采用上述结构,可以使第一定位夹具与第二定位夹具使用同一种结构,降低生产成本。同时使得第一定位夹具和第二定位夹具配合性更好,减少两个定位夹具的冲击性。
14.较佳地,所述第一凸起和/或所述第二凸起具有多个。
15.在本方案中,使得第一凸起和第二凹槽和/或第二凸起和第一凹槽产生更大的附加扭矩,进一步降低旋转端的摆动幅度,提高角向定位的精度。
16.较佳地,所述第二凸起从一个所述第一凹槽进入另外一个所述第一凹槽的运动轨迹呈正弦曲线结构;
17.和/或,所述第一凸起从一个所述第二凹槽进入另外一个所述第二凹槽的运动轨迹呈正弦曲线结构。
18.在本方案中,采用上述设置,使得旋转端做钟摆运动并不断降低运动幅度时,焊接工件在角向位置调整阶段趋于平滑无冲击,有效避免了刚性冲击对焊接工件的焊接接头产生质量影响。
19.较佳地,所述第一定位夹具设于所述旋转工件的外周侧,所述第二定位夹具设于所述移动工件的外周侧。
20.在本方案中,采用上述结构,安装方便,便于第一定位夹具与第二定位夹具进行定位安装。
21.较佳地,所述旋转端包括飞轮、第一滑轨和第二滑轨,所述第一滑轨固定在所述飞轮的内周面,所述第二滑轨可拆卸固定在所述旋转工件上,所述第一定位夹具滑动设于所述第一滑轨和所述第二滑轨之间。
22.在本方案中,采用上述结构,简单方便的限制第一定位夹具的运动轨迹。
23.较佳地,所述旋转端还包括第一固定夹具,所述第一固定夹具固定于所述飞轮,所述旋转工件可拆卸固定于所述第一固定夹具上。
24.较佳地,所述弹性件的一端连接于所述第一定位夹具,所述弹性件的另一端连接于所述飞轮或所述第一固定夹具。
25.在本方案中,采用上述连接方式,便于弹性件对第一定位夹具施加轴向移动的力。
26.较佳地,所述移动端包括第二固定夹具、第三滑轨和第四滑轨,所述第三滑轨固定在所述第二固定夹具的内周面,所述第四滑轨可拆卸固定在所述移动工件上,所述第二定位夹具滑动设于所述第三滑轨和所述第四滑轨之间。
27.在本方案中,采用上述结构,结构简单、便于对第二定位夹具进行安装限位。
28.较佳地,所述移动端还包括第一驱动机构,所述第一驱动机构用于驱动所述移动工件朝向所述旋转工件方向移动。
29.较佳地,所述移动端还包括第二驱动机构,所述第二驱动机构用于驱动所述第二定位夹具朝向所述第一定位夹具方向移动。
30.较佳地,所述第一定位夹具和/或所述第二定位夹具有多个。
31.在本方案中,设置多个第一定位夹具或第二定位夹具,可以提供更大的附加扭矩,增强惯性摩擦焊机的角向控制精度。
32.本发明的积极进步效果在于:本发明的惯性摩擦焊机在焊接发动机的转子叶盘和转轴时,通过确定两个焊接工件在焊接结束后的角向位置预先调整第一定位夹具和第二定位夹具的相对位置,在工件焊接的顶锻保压阶段后期旋转端转速较小时,通过第一定位夹具和第二定位夹具接触并产生摩擦并且在弹性件的作用下,第二凸起在第一凹槽之间运动和/或第一凸起在第二凹槽之间运动,不断降低旋转端的转速,当旋转端速度较低时,旋转端的惯性无法使第二凸起从一个第一凹槽进入下一个第一凹槽中或第一凸起从一个第二凹槽进入下一个第二凹槽中,此时在第一定位夹具和第二定位夹具所产生的附加扭矩下,旋转端开始做反向运动并进行运动幅度不断降低的钟摆运动并降低转速,最终使得第一凹槽与第二凸起咬合和/或第二凹槽与第一凸起咬合结束旋转,从而使得转子叶盘上的叶片与转轴上预设位置的角度与预设角度一致,保证了角向位置控制的精度,进而可以焊接带有叶片的整体叶盘与转轴并保证整体叶盘与转轴的角向位置,提高发动机性能,降低发动机整体重量。并且该惯性摩擦焊机采用纯机械的方式进行控制,无电子控制的延迟效应,保证了焊接角向控制的稳定性和可靠性。
附图说明
33.图1为现有惯性摩擦焊机的各阶段中工件摩擦力和工件转速变化示意图。
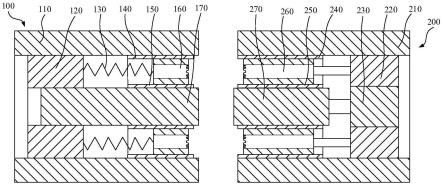
34.图2本发明较佳实施例中惯性摩擦焊机的结构示意图。
35.图3为本发明较佳实施例中第一定位夹具和第二定位夹具的结构示意图。
36.图4为本发明较佳实施例中第一定位夹具和第二定位夹具的咬合示意图。
37.图5为本发明较佳实施例中第一定位夹具和第二定位夹具在惯性摩擦焊机运行前的相位安装图。
38.图6为本发明较佳实施例中惯性摩擦焊机的各阶段中工件摩擦力和工件转速变化示意图。
39.图7为本发明较佳实施例中惯性摩擦焊接的角向调整阶段第一定位夹具和第二定位夹具的位置变化示意图。
40.附图标记说明:
41.旋转端100
42.飞轮110
43.第一固定夹具120
44.弹性件130
45.第一滑轨140
46.第二滑轨150
47.第一定位夹具160
48.第一凹槽161
49.第一凸起162
50.旋转工件170
51.移动端200
52.第二固定夹具210
53.第一驱动机构220
54.第二驱动机构230
55.第三滑轨240
56.第四滑轨250
57.第二定位夹具260
58.第二凹槽261
59.第二凸起262
60.移动工件270
具体实施方式
61.下面通过实施例的方式并结合附图来更清楚完整地说明本发明,但并不因此将本发明限制在该实施例范围之中。
62.需要理解的是,本发明使用“第一”、“第二”等词语来限定零部件或结构,仅仅是为了便于对相应零部件或结构进行区别,如没有另行声明,上述词语并没有特殊含义,因此也不能理解为对本发明保护范围的限制。此外,本技术的一个或多个实施例中的某些特征、结构或特点可以进行适当的组合。
63.如图2-5所示,本实施例公开了一种惯性摩擦焊机,包括旋转端100和移动端200,旋转端100用于装夹旋转工件170,移动端200用于装夹移动工件270,惯性摩擦焊机还包括
第一定位夹具160和第二定位夹具260,第一定位夹具160设于旋转端100,第一定位夹具160被设置成与旋转端100同步转动且只能沿旋转工件170的轴向移动,第二定位夹具260设于移动端200且被设置成只能沿移动工件270的轴向移动。
64.第一定位夹具160远离移动端200的一侧设有弹性件130,弹性件130用于对第一定位夹具160施加朝移动端200方向移动的力。
65.第一定位夹具160朝向第二定位夹具260的端面具有在周向上按照预设角度间隔设置的多个第一凹槽161,第二定位夹具260上设有与第一凹槽161相适配的第二凸起262。并且,第二定位夹具260朝向第一定位夹具160的端面具有在周向上按照预设角度间隔设置的多个第二凹槽261,第一定位夹具160上设有与第二凹槽261相适配的第一凸起162。旋转端100转动时,第二凸起262能从一个第一凹槽161进入另外一个第一凹槽161,第一凸起162能从一个第二凹槽261进入另外一个第二凹槽261。
66.本实施例的惯性摩擦焊机采用上述结构,在焊接发动机的转子叶盘和转轴时,通过确定两个焊接工件在焊接结束后的角向位置预先调整第一定位夹具160和第二定位夹具260的相对位置,在工件焊接的顶锻保压阶段后期旋转端100转速较小时,通过第一定位夹具160和第二定位夹具260接触并产生摩擦并且在弹性件130的作用下,第二凸起262在第一凹槽161之间运动并且第一凸起162在第二凹槽261之间运动,不断降低旋转端100的转速,当旋转端100速度较低时,旋转端100的惯性无法使第二凸起262从一个第一凹槽161进入下一个第一凹槽161中,也无法使第一凸起162从一个第二凹槽261进入下一个第二凹槽261中,此时在第一定位夹具160和第二定位夹具260所产生的附加扭矩下,旋转端100开始做反向运动并进行运动幅度不断降低的钟摆运动并降低转速,最终同时使得第一凹槽161与第二凸起262咬合、第二凹槽261与第一凸起162咬合结束旋转,从而使得转子叶盘上的叶片与转轴上预设位置的角度与预设角度一致,保证了角向位置控制的精度,进而可以焊接带有叶片的整体叶盘与转轴并保证整体叶盘与转轴的角向位置,提高发动机性能,降低发动机整体重量。并且该惯性摩擦焊机采用纯机械的方式进行控制,无电子控制的延迟效应,保证了焊接角向控制的稳定性和可靠性。该惯性摩擦焊机能够应用于大吨位、高角向精度、高焊接质量的零件焊接。
67.本实施例中,如图2所示,两个相邻第一凹槽161之间形成第一凸起162,两个相邻第二凹槽261之间形成第二凸起262,第一凸起162和第二凸起262的结构大小相同。上述结构设置使第一定位夹具160与第二定位夹具260使用同一种结构,降低生产成本。同时使得第一定位夹具160和第二定位夹具260配合性更好,减少两个定位夹具的冲击性。
68.并且,在本实施例中,如图2所示,第一凸起162和第二凸起262具有多个。使得第一凸起162和第二凹槽261以及第二凸起262和第一凹槽161产生更大的附加扭矩,进一步降低旋转端100的摆动幅度,提高角向定位的精度。
69.在一些实施例中,第一定位夹具160朝向第二定位夹具260的端面具有在周向上按照预设角度间隔设置的多个第一凹槽161。第二定位夹具260上只设有与第一凹槽161相适配的一个或多个第二凸起262,不设置第二凹槽261。旋转端100转动时,第二凸起262能从一个第一凹槽161进入另外一个第一凹槽161。第二凸起262在第一凹槽161之间运动,不断降低旋转端100的转速,当旋转端100速度较低时,旋转端100的惯性无法使第二凸起262从一个第一凹槽161进入下一个第一凹槽161中,此时在第一定位夹具160和第二定位夹具260所
产生的附加扭矩下,旋转端100开始做反向运动并进行运动幅度不断降低的钟摆运动并降低转速,最终同时使得第一凹槽161与第二凸起262咬合,从而使得转子叶盘上的叶片与转轴上预设位置的角度与预设角度一致,保证了角向位置控制的精度
70.或者,在一些实施例中,第二定位夹具260朝向第一定位夹具160的端面具有在周向上按照预设角度间隔设置的多个第二凹槽261。第一定位夹具160上设有与第二凹槽261相适配的一个或多个第一凸起162,不设置第一凹槽161。旋转端100转动时,第一凸起162能从一个第二凹槽261进入另外一个第二凹槽261。第一凸起162在第二凹槽261之间运动,不断降低旋转端100的转速,当旋转端100速度较低时,旋转端100的惯性无法使第一凸起162从一个第二凹槽261进入下一个第二凹槽261中,此时在第一定位夹具160和第二定位夹具260所产生的附加扭矩下,旋转端100开始做反向运动并进行运动幅度不断降低的钟摆运动并降低转速,最终同时使得第二凹槽261与第一凸起162咬合结束旋转,从而使得转子叶盘上的叶片与转轴上预设位置的角度与预设角度一致,保证了角向位置控制的精度
71.在本实施例中,第二凸起262从一个第一凹槽161进入另外一个第一凹槽161的运动轨迹呈正弦曲线结构。第一凸起162从一个第二凹槽261进入另外一个第二凹槽261的运动轨迹呈正弦曲线结构。采用上述结构,使得旋转端100做钟摆运动并不断降低运动幅度时,焊接工件在角向位置调整阶段趋于平滑无冲击,有效避免了刚性冲击对焊接工件的焊接接头产生质量影响。
72.如图2所示。本实施例中,第一定位夹具160设于旋转工件170的外周侧,第二定位夹具260设于移动工件270的外周侧。采用上述结构,安装方便,便于第一定位夹具160与第二定位夹具260进行定位安装。
73.在一些实施例中,第一定位夹具160设于飞轮110的外周侧,第二定位夹具260设于第二固定夹具210的外周侧,需要保证第一定位夹具160和第二定位夹具260能够在角向定位阶段抵压产生摩擦并能最终实现咬合限位。
74.如图2所示,旋转端100包括飞轮110、第一滑轨140和第二滑轨150,第一滑轨140固定在飞轮110的内周面,第二滑轨150可拆卸固定在旋转工件170上,第一定位夹具160滑动设于第一滑轨140和第二滑轨150之间。采用上述结构,简单方便的限制第一定位夹具160的运动轨迹。
75.在本实施例中,第一滑轨140和第二滑轨150均为圆筒结构,第一滑轨140的内周面和第二滑轨150的外周面分别具有限制同一个第一定位夹具160移动方向的安装导向结构。由于本实施例中的第一定位夹具160具有多个且周向分布在旋转工件170的外周侧,因此安装导向结构也具有多组。
76.在一些实施例中,第一滑轨140和第二滑轨150为限制同一个第一定位夹具160两侧的滑轨组件。旋转工件170的外周侧具有多个滑轨组件。
77.如图2所示,旋转端100还包括第一固定夹具120,第一固定夹具120固定于飞轮110,旋转工件170可拆卸固定于第一固定夹具120上。弹性件130的一端连接于第一定位夹具160,弹性件130的另一端连接于第一固定夹具120。在一些实施例中,弹性件130的另一端连接于飞轮110。弹性件130采用上述连接方式,便于弹性件130对第一定位夹具160施加轴向移动的力。弹性件130优选为弹簧。
78.如图2所示,移动端200包括第二固定夹具210、第三滑轨240和第四滑轨250,第三
滑轨240固定在第二固定夹具210的内周面,第四滑轨250可拆卸固定在移动工件270上,第二定位夹具260滑动设于第三滑轨240和第四滑轨250之间。移动端200采用上述结构,结构简单、便于对第二定位夹具260进行安装限位。
79.在本实施例中,第三滑轨240和第四滑轨250均为圆筒结构,第三滑轨240的内周面和第四滑轨250的外周面分别具有限制同一个第二定位夹具260移动方向的安装导向结构。移动工件270移动时会带动第四滑轨250一同移动,但是不会带动第二定位夹具260移动。由于本实施例中的第二定位夹具260具有多个且周向分布在移动工件270的外周侧,因此安装导向结构也具有多组。
80.在一些实施例中,第三滑轨240和第四滑轨250为限制同一个第二定位夹具260两侧的滑轨组件。移动工件270的外周侧具有多个滑轨组件。
81.本实施例同时设置多个第一定位夹具160和第二定位夹具260,可以提供更大的附加扭矩,进一步增强惯性摩擦焊机的角向控制精度。
82.如图2所示,移动端200还包括第一驱动机构220,第一驱动机构220用于驱动移动工件270朝向旋转工件170方向移动。
83.在本实施例中,第一驱动机构220为液压伸缩机构,液压伸缩机构的液压杆与移动工件270抵接,液压伸缩机构的液压缸驱动液压杆使移动工件270朝向旋转工件170的方向移动。
84.如图2所示,移动端200还包括第二驱动机构230,第二驱动机构230用于驱动第二定位夹具260朝向第一定位夹具160方向移动。
85.在本实施例中,第二驱动机构230也为液压伸缩机构,液压伸缩机构的液压杆与第二定位夹具260的后端抵接,液压伸缩机构的液压缸驱动液压杆使第二定位夹具260朝向第一定位夹具160的方向移动。
86.为进一步了解本发明的技术方案,下面对本发明的惯性摩擦焊机的工作过程进行描述。
87.将旋转端100各部件按图2所示的惯性摩擦焊机进行装夹:旋转工件170装入第一固定夹具120中,旋转工件170与第一定位夹具160通过第二滑轨150进行连接,将飞轮110与第一固定夹具120装夹固定,且飞轮110与第一定位夹具160通过第一滑轨140进行连接,第一固定夹具120与第一定位夹具160通过弹性件130进行连接,从而使旋转工件170、第一固定夹具120、飞轮110、第一滑轨140、第二滑轨150之间无相对运动成为一个整体i,第一定位夹具160与整体i可以进行直线运动;旋转端100所有部件之间均无相对旋转。
88.将移动端200各部件按图2所示的惯性摩擦焊机进行装夹:移动工件270通过第四滑轨250与第二定位夹具260连接,第二定位夹具260又通过第三滑轨240与第二固定夹具210连接。移动工件270在焊接方向上受到第一驱动机构220的液压缸驱动的液压杆施加的压力顶住,第二定位夹具260受到第二驱动机构230的液压缸的液压杆施加的压力顶住。移动端200所有部件之间均没有相对转动。
89.调整旋转端100和移动端200,使旋转工件170与移动工件270保持同轴。惯性摩擦焊机的电机驱动飞轮110旋转带动旋转端100旋转至设定转速,即图6中起始阶段;移动工件270在第一驱动机构220的液压杆的作用下向旋转端100靠近并与旋转工件170摩擦,即图6中摩擦阶段;第一驱动机构220的液压杆向移动工件270和旋转工件170施加顶锻压力,即图
6中顶锻阶段;第二定位夹具260在第二驱动机构230的液压杆的作用下向第一定位夹具160移动,并促使旋转端100的弹簧(弹性件130)压缩。
90.对于角向调整阶段,下面先结合图7对第一定位夹具160和第二定位夹具260在角向定位过程中的位置变化进行说明,其中图7中箭头方向为附加扭矩方向。第一定位夹具160与第二定位夹具260在压力的作用下相对运动,当第二定位夹具260的第二凸起262位于第一定位夹具160的某个第一凹槽161内时两个定位夹具处于第一位置(图7中位置1,此时第一定位夹具160的第一凸起162也位于第二定位夹具260的某个第二凹槽261内);当第二定位夹具260的第二凸起262位于第一定位夹具160的第一凹槽161与第一凸起162的交界点时,两个定位夹具处于第二位置(图7中位置2,此时第一定位夹具160的第一凸起162也位于第二定位夹具260的第二凹槽261与第一凸起162的交界点);当第二定位夹具260的第二凸起262越过该第一凹槽161与第一凸起162的顶端抵接时(图7中位置3,此时第一定位夹具160的第一凸起162也越过第二凹槽261与第二凸起262的顶端抵接);当第二定位夹具260的第二凸起262位于第一定位夹具160的下一个第一凹槽161内时两个定位夹具处于第四位置(图7中位置4,此时第一定位夹具160的第一凸起162也位于第二定位夹具260的下一个第二凹槽261内)。
91.第一定位夹具160与第二定位夹具260从位置1运动到位置3过程中,两个定位夹具产生的附加扭矩与旋转端100的旋转方向相反,从而进一步降低旋转端100的转速;第一定位夹具160与第二定位夹具260从位置3运动到位置4过程中,两个定位夹具产生的附加扭矩与旋转端100的旋转方向相同,从而使旋转端100的转速略微上升;当转速足够大时,旋转端100能够促使两个定位夹具进行位置1到位置3的过程并进入位置4的往复过程;当转速较小无法冲破位置2时,旋转端100在附加扭矩的作用下做钟摆运动,最终使第一定位夹具160与第二定位夹具260停留在位置1的状态。由于第一定位夹具160与旋转工件170之间无相对转动,第二定位夹具260与移动工件270之间无相对运动,因此旋转工件170与移动工件270之间保持设定角度,即图6中角向调整阶段。此时,第一驱动机构220的液压杆向移动工件270和旋转工件170保持顶锻压力,即图6中保压阶段,焊接完成。
92.在保证焊接接头无冲击的基础上,还应保证最终飞轮110能够停留在设定的角向位置。本发明实施例设计了如图3所示的用于角向定位的定位夹具,即安装在旋转端100的第一定位夹具160和安装在移动端200的第二定位夹具260。第一定位夹具160与第二定位夹具260的接合面在圆周方向呈现图7所示的正弦曲线分布,且第一定位夹具160的相位与第二定位夹具260相位正好相反,从而使得第一定位夹具160与第二定位夹具260之间可以实现紧密贴合。将两个定位夹具安装在如图2所示的惯性摩擦焊机上。当进入焊接工件角向调整阶段时,由于此时飞轮110转速仍较大,此时两定位夹具之间的接触点能够实现从如图7的位置1到位置2、位置3、位置4的移动,此时第一定位夹具160在弹簧(弹性件130)和第二定位夹具260的共同作用下实现了往复运动。当飞轮110速度较低时,飞轮110的惯性无法使两个定位夹具的接触点从位置1移动到位置3,此时在两个定位夹具所产生的附加扭矩下,飞轮110和旋转工件170开始做反向运动,旋转端100此时进入图6放大图所示的钟摆运动,直到最终两个定位夹具之间以图7中位置1的方式实现最紧密的配合,此时飞轮110运动停止在以位置1的方式配合的角度,由于定位夹具的高精度配合,保证了焊接工件之间的高精度角向控制。
93.下面结合传统的焊接摩擦焊的焊接过程对本发明的惯性摩擦焊机的焊接过程进行进一步说明。
94.在传统的惯性摩擦焊焊接过程,如图1所示,当飞轮110达到设定转速后,旋转工件170与移动工件270相互摩擦,飞轮110在摩擦扭矩的作用下转速逐渐降低并停止,停止的角向位置无法控制。由于飞轮110与旋转工件170之间无相对运动,为了控制飞轮110(即旋转工件170)的停止位置,需在飞轮110停止前,通过角向定位装置控制飞轮110位置,从而保证飞轮110停止在设定角度。如图6所示,本发明的惯性摩擦焊机通过采用角向定位的焊接过程,与传统的焊接过程相比,在顶锻保压阶段,增加了角向调整阶段,即在飞轮110转速较低时,通过角向定位装置(第一定位夹具160和第二定位夹具260)的作用干预飞轮110的转动,最终使飞轮110在设定位置停止。如图6中放大图所示,在角向调整阶段初期,飞轮110转速仍较大,此时飞轮110转速变化与传统焊接过程相似,当飞轮110(旋转工件170)转速较低时,飞轮110开始做钟摆运动,运动幅度逐渐减小,此运动状态可以避免采用定位销等刚性控制带来的冲击效应,从而保证了焊接接头的质量。
95.在角向调整阶段末期(即图6中放大图所示的钟摆运动阶段),为了保证角向精度,需使最终第一定位夹具160和第二定位夹具260配合位置为图7中位置1。因此,必须保证当第一定位夹具160和第二定位夹具260配合发生偏离时,能够有足够大的附加扭矩驱动旋转端100转动。为保证此效果,需从以下两方面进行控制:
96.第一,降低惯性摩擦焊机整体的内部摩擦,尤其是第一定位夹具160和第二定位夹具260之间的摩擦力。比如对第一定位夹具160和第二定位夹具260的配合表面进行光滑处理,或将第二定位夹具260设计成带有滑动轮的结构,使滑动摩擦变为滚动摩擦;
97.第二,增加附加扭矩。可以通过增加第一定位夹具160和第二定位夹具260形成的正弦曲线的斜率(如增加高度、缩短正弦曲线一个周期的长度等),也可以增加第一定位夹具160和第二定位夹具260之间的挤压力,从而增加附加扭矩。
98.虽然以上描述了本发明的具体实施方式,但是本领域的技术人员应当理解,这仅是举例说明,本发明的保护范围是由所附权利要求书限定的。本领域的技术人员在不背离本发明的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,但这些变更和修改均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1