一种航空航天用钛合金板激光切割装置的制作方法
1.本发明涉及一种切割装置,尤其涉及一种航空航天用钛合金板激光切割装置。
背景技术:
2.钛合金板是现代社会中用于航空航天行业制造的一种重要板材,在对钛合金板进行加工制造时,通常需要对钛合金板进行激光切割。
3.目前,对钛合金板进行激光切割的方式通常是由人工将钛合金板放置在激光切割机上,放置完毕后,再推动钛合金板移动通过激光切割机来进行切割,上述方式在操作时通常需要人工来推动钛合金板,较为耗费人力,并且在进行切割时,不能够对钛合金板进行限位,容易导致钛合金板晃动影响切割。
4.因此,需要设计一种操作时能够节省人力,并且在进行切割时能够对钛合金板进行限位的航空航天用钛合金板激光切割装置。
技术实现要素:
5.(1)要解决的技术问题
6.本发明为了克服上述方式在操作时通常需要人工来推动钛合金板,较为耗费人力,并且在进行切割时,不能够对钛合金板进行限位,容易导致钛合金板晃动影响切割的缺点,本发明要解决的技术问题是提供一种操作时能够节省人力,并且在进行切割时能够对钛合金板进行限位的航空航天用钛合金板激光切割装置。
7.(2)技术方案
8.为了解决上述技术问题,本发明提供了这样一种航空航天用钛合金板激光切割装置,包括有支撑架,支撑架两侧均连接有安装板和第一固定板;第一连接板,两侧第一固定板顶部一侧均连接有第一连接板;第一导向杆,第一连接板顶部连接有第一导向杆;第二连接板,两侧第一导向杆之间滑动式连接有第二连接板;第一弹簧,第二连接板与两块第一连接板之间均连接有第一弹簧;激光切割器,第二连接板上安装有激光切割器,激光切割器用于切割钛合金板;推料机构,安装板上设有推料机构,推料机构用于推动钛合金板移动;驱动机构,安装板与支撑架之间设有驱动机构,驱动机构用于驱动推料机构运作。
9.优选地,推料机构包括有第二导向杆,安装板上连接有第二导向杆;连接块,第二导向杆上滑动式连接有连接块;第二弹簧,连接块与安装板之间连接有第二弹簧;双向螺母,连接块顶部连接有双向螺母;推板,双向螺母上连接有推板,推板用于推动钛合金板移动。
10.优选地,驱动机构包括有第二固定板,安装板顶部两侧均连接有第二固定板;双向螺杆,两侧第二固定板之间转动式连接有双向螺杆,双向螺母与双向螺杆螺纹配合;双轴电机,支撑架上安装有双轴电机;锥齿轮,双轴电机的两根输出轴和两根双向螺杆上均连接有锥齿轮,双轴电机上的锥齿轮与双向螺杆上的锥齿轮相互啮合。
11.优选地,还包括有下料机构,下料机构包括有第一固定杆,第一固定杆为四根设
置,四根第一固定杆分别连接在两块第一固定板顶部;第一转轴,其中两根第一固定杆上均转动式连接有第一转轴;第二转轴,另外两根第一固定杆上均转动式连接有第二转轴;下料板,第一转轴和第二转轴上均连接有下料板,下料板用于放置钛合金板;皮带轮,第一转轴下部和第二转轴下部均连接有皮带轮;平皮带,第一转轴上的皮带轮与第二转轴上的皮带轮之间绕有平皮带;单向齿轮,第二转轴上连接有单向齿轮;第一齿条,推板顶部连接有第一齿条,第一齿条与单向齿轮啮合。
12.优选地,还包括有夹紧机构,夹紧机构包括有第三导向杆,第一连接板上滑动式连接有第三导向杆;压板,第三导向杆底部连接有压板,压板用于对钛合金板进行限位;第三连接板,压板上连接有第三连接板;第三弹簧,压板与第一连接板之间连接有第三弹簧;拨杆,第一齿条底部两侧均连接有拨杆,拨杆与第三连接板配合。
13.优选地,还包括有上升机构,上升机构包括有第三固定板,两侧第一连接板上部均连接有第三固定板;第三转轴,第三固定板上转动式连接有第三转轴,第三转轴上连接有传动齿轮和曲柄;第二齿条,压板顶部连接有第二齿条,第二齿条与传动齿轮啮合;第四连接板,第二连接板顶部两侧均连接有第四连接板,第四连接板与曲柄配合。
14.优选地,还包括有阻挡机构,阻挡机构包括有第二固定杆,其中两根第一固定杆上均滑动式连接有第二固定杆;第一挡板,第二固定杆上连接有第一挡板;旋转杆,另外两根第一固定杆上均转动式连接有旋转杆;第二挡板,旋转杆上连接有第二挡板;滑杆,两块第二挡板之间滑动式连接有滑杆。
15.优选地,滑杆为可拆卸设置,滑杆用于将两块第二挡板固定。
16.(3)本发明的有益效果为:
17.1、本发明通过驱动机构中的双轴电机来驱动推料机构中的推板推动钛合金板移动,在推动钛合金板移动的过程中,通过激光切割器来对钛合金板进行切割,从而实现了自动对钛合金板进行切割的效果,并且在对钛合金板进行切割时,不需要人工来推动钛合金板,有效的节省了人力。
18.2、本发明在对钛合金板进行激光切割时,能够通过夹紧机构中的压板来对钛合金板进行限位,从而达到了能够对钛合金板进行限位避免钛合金板晃动影响切割的效果。
19.3、本发明通过下料机构来添加钛合金板,不需要人工来频繁的放置钛合金板,进一步的节省了人力。
附图说明
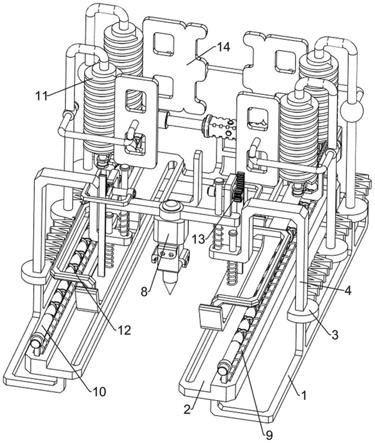
20.图1为本发明的立体结构示意图。
21.图2为本发明的第一种局部立体结构示意图。
22.图3为本发明的第二种局部立体结构示意图。
23.图4为本发明的推料机构立体结构示意图。
24.图5为本发明推料机构的部分立体结构示意图。
25.图6为本发明的驱动机构立体结构示意图。
26.图7为本发明驱动机构的部分立体结构示意图。
27.图8为本发明的下料机构立体结构示意图。
28.图9为本发明下料机构的部分立体结构示意图。
29.图10为本发明的夹紧机构立体结构示意图。
30.图11为本发明夹紧机构的部分立体结构示意图。
31.图12为本发明的上升机构立体结构示意图。
32.图13为本发明上升机构的部分立体结构示意图。
33.图14为本发明的阻挡机构立体结构示意图。
34.图15为本发明阻挡机构的部分立体结构示意图。
35.附图中的标记为:1
‑
支撑架,2
‑
安装板,3
‑
第一固定板,4
‑
第一连接板,5
‑
第一导向杆,6
‑
第一弹簧,7
‑
第二连接板,8
‑
激光切割器,9
‑
推料机构,91
‑
连接块,92
‑
第二导向杆,93
‑
第二弹簧,94
‑
双向螺母,95
‑
推板,10
‑
驱动机构,101
‑
第二固定板,102
‑
双向螺杆,103
‑
双轴电机,104
‑
锥齿轮,11
‑
下料机构,111
‑
第一固定杆,112
‑
下料板,113
‑
第一转轴,114
‑
第二转轴,115
‑
单向齿轮,116
‑
第一齿条,117
‑
皮带轮,118
‑
平皮带,12
‑
夹紧机构,121
‑
压板,122
‑
第三连接板,123
‑
第三导向杆,124
‑
第三弹簧,125
‑
拨杆,13
‑
上升机构,131
‑
第三固定板,132
‑
第三转轴,133
‑
传动齿轮,134
‑
第二齿条,135
‑
曲柄,136
‑
第四连接板,14
‑
阻挡机构,141
‑
第二固定杆,142
‑
第一挡板,143
‑
旋转杆,144
‑
第二挡板,145
‑
滑杆。
具体实施方式
36.下面结合附图和实施例对本发明作进一步的说明。
37.实施例1
38.一种航空航天用钛合金板激光切割装置,如图1
‑
7所示,包括有支撑架1、安装板2、第一固定板3、第一连接板4、第一导向杆5、第一弹簧6、第二连接板7、激光切割器8、推料机构9和驱动机构10,支撑架1左右两侧均分别连接有安装板2和第一固定板3,第一固定板3位于安装板2外侧,两侧第一固定板3顶部前侧均连接有第一连接板4,第一连接板4顶部连接有第一导向杆5,两侧第一导向杆5之间滑动式连接有第二连接板7,第二连接板7与两块第一连接板4之间均连接有第一弹簧6,第二连接板7上安装有激光切割器8,安装板2上设有推料机构9,安装板2与支撑架1之间设有驱动机构10。
39.推料机构9包括有连接块91、第二导向杆92、第二弹簧93、双向螺母94和推板95,安装板2上连接有第二导向杆92,第二导向杆92上滑动式连接有连接块91,连接块91与安装板2之间连接有第二弹簧93,连接块91顶部连接有双向螺母94,双向螺母94上连接有推板95。
40.驱动机构10包括有第二固定板101、双向螺杆102、双轴电机103和锥齿轮104,安装板2顶部前后两侧均连接有第二固定板101,前后对应的两个第二固定板101之间均转动式连接有双向螺杆102,双向螺母94与双向螺杆102螺纹配合,支撑架1后侧安装有双轴电机103,双轴电机103的两根输出轴和两根双向螺杆102后侧均连接有锥齿轮104,双轴电机103上的锥齿轮104与双向螺杆102上的锥齿轮104相互啮合。
41.当需要对钛合金板进行激光切割时,可以使用本装置,首先使用者可以将钛合金板放置在两侧安装板2之间,随后使用者可以启动双轴电机103通过锥齿轮104带动两个双向螺杆102转动,双向螺杆102转动带动双向螺母94向后移动,当双向螺母94向后移动至极限后,双向螺杆102继续转动带动双向螺母94向前移动,双向螺母94在移动时带动推板95一起移动,当双向螺母94带动推板95向前移动至与钛合金板接触时,可以推动钛合金板向前移动,这时可以拉动第二连接板7带动激光切割器8向上移动,第一弹簧6被拉伸,当钛合金
板移动至激光切割器8下方时,可松开第二连接板7,在第一弹簧6的作用下,能够使激光切割器8向下移动,此时,可以启动激光切割器8对钛合金板进行切割,当双向螺母94向前移动至极限后,激光切割器8也对钛合金板切割完毕,这时双向螺杆102继续转动带动双向螺母94向后移动复位,随后即可再次放置钛合金板进行切割,如此反复,就能够对钛合金板进行切割,切割完毕后,关闭双轴电机103即可,双向螺母94在前后移动时带动连接块91一起移动,第二弹簧93起缓冲作用。
42.实施例2
43.在实施例1的基础之上,如图1、图8和图9所示,还包括有下料机构11,下料机构11包括有第一固定杆111、下料板112、第一转轴113、第二转轴114、单向齿轮115、第一齿条116、平皮带118和皮带轮117,第一固定板3顶部后侧连接有两根第一固定杆111,两根第一固定杆111分前后设置,前侧的两根第一固定杆111上均转动式连接有第一转轴113,后侧的两根第一固定杆111上均转动式连接有第二转轴114,第一转轴113和第二转轴114上均连接有下料板112,第一转轴113下部和第二转轴114下部均连接有皮带轮117,第一转轴113上的皮带轮117与第二转轴114上的皮带轮117之间绕有平皮带118,第二转轴114上连接有单向齿轮115,推板95顶部连接有第一齿条116,第一齿条116与单向齿轮115啮合。
44.在放置钛合金板时,可以将多块钛合金板分别插在四块下料板112上不同的间隙之间,双向螺母94在带动推板95向后移动时,推板95带动第一齿条116一起向后移动,第一齿条116在向后移动时戳动单向齿轮115转动,单向齿轮115转动带动第二转轴114转动,第二转轴114转动通过皮带轮117和平皮带118带动第一转轴113转动,第一转轴113和第二转轴114在转动时带动下料板112转动,下料板112在转动时将钛合金板向下输送,当第一齿条116向后移动至极限时,下料板112刚好将最下方的钛合金板送下,这时最下方的钛合金板落在两块安装板2之间,随后推板95向前移动即可推动钛合金板,这时第一齿条116向前移动戳动单向齿轮115反向转动,由于单向齿轮115为单向设置,单向齿轮115在反向转动时不会带动第二转轴114转动,如此,就不需要人工来频繁的放置钛合金板,有效的节省了人力。
45.如图1、图10和图11所示,还包括有夹紧机构12,夹紧机构12包括有压板121、第三连接板122、第三导向杆123、第三弹簧124和拨杆125,第一连接板4上滑动式连接有第三导向杆123,第三导向杆123底部连接有压板121,压板121与第一连接板4之间连接有第三弹簧124,压板121上连接有第三连接板122,第一齿条116底部前后两侧均连接有拨杆125,拨杆125与第三连接板122配合。
46.第一齿条116在前后移动时带动拨杆125前后移动,当拨杆125向前移动至与第三连接板122接触后,拨杆125继续向前移动推动第三连接板122向下移动,第三连接板122向下移动带动压板121向下移动,第三弹簧124被拉伸,压板121向下移动后能够对钛合金板进行限位,从而避免在对钛合金板进行激光切割时乱晃影响切割。
47.实施例3
48.在实施例2的基础之上,如图1、图12和图13所示,还包括有上升机构13,上升机构13包括有第三固定板131、第三转轴132、传动齿轮133、第二齿条134、曲柄135和第四连接板136,左侧第一连接板4前侧上部和右侧第一连接板4后侧上部均连接有第三固定板131,第三固定板131上转动式连接有第三转轴132,第三转轴132上分别连接有传动齿轮133和曲柄135,曲柄135位于传动齿轮133的内侧,第二连接板7顶部左右两侧均连接有第四连接板
136,第四连接板136与曲柄135配合,压板121顶部连接有第二齿条134,第二齿条134与传动齿轮133啮合。
49.压板121在向下移动时带动第二齿条134向下移动,第二齿条134向下移动戳动传动齿轮133转动,传动齿轮133转动带动第三转轴132转动,第三转轴132转动带动曲柄135转动,当曲柄135转动至与第四连接板136接触后,曲柄135继续转动推动第四连接板136向上移动,第四连接板136在向上移动时带动第二连接板7向上移动,从而带动激光切割器8向上移动,如此,就不需要人工来拉动第二连接板7带动激光切割器8向上移动,有效的节省了人力。
50.如图1、图14和图15所示,还包括有阻挡机构14,阻挡机构14包括有第二固定杆141、第一挡板142、旋转杆143、第二挡板144和滑杆145,前侧的两根第一固定杆111上均滑动式连接有第二固定杆141,第二固定杆141上连接有第一挡板142,后侧的两根第一固定杆111上均转动式连接有旋转杆143,旋转杆143上连接有第二挡板144,两块第二挡板144之间滑动式连接有滑杆145。
51.滑杆145为可拆卸设置,滑杆145用于将两块第二挡板144固定。
52.将钛合金板加在四块下料板112之间后,可以通过第一挡板142和第二挡板144配合将钛合金板挡住,避免钛合金板滑落,当需要添加钛合金板时,可以将滑杆145抽出,再扭动旋转杆143带动第二挡板144不再将后侧的两块下料板112挡住,随后即可添加钛合金板,添加完毕后,扭动旋转杆143带动第二挡板144复位,随后再将滑杆145插入两块第二挡板144之间即可,如此,就能够在放置好钛合金板后将钛合金板挡住,避免钛合金板滑落。
53.以上所述实施例仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1