一种冲压自动化连线作业工艺布局及方法与流程
1.本发明涉及冲压生产领域,尤其涉及一种冲压自动化连线作业工艺布局及方法。
背景技术:
2.针对拉伸零件的生产布局,目前通常是把零件的拉伸工序与冲压、成形工序分开作业;其主要原因是基于零件拉伸工序一般需涂油,且油压机相对冲床工作速度要稍慢;故拉伸工序往往不能与冲压、成形工序进行同步。
3.当前,很多大中型冲压厂为了控制人工制造成本,纷纷引进冲压机械手以解决工序同步问题。然而,机械手在物料周转过程中也很难做到拉伸工序与冲压、成形工序连线作业,往往会在拉伸工序按排两台油压机与两套拉伸模具作业,以“供应”后工序冲压、成形生产,造成设备资源浪费,制造成本高。
技术实现要素:
4.为克服现有技术的问题,本发明提供一种冲压自动化连线作业工艺,可以实现拉伸零件在机械手传递过程中的自动化连线作业,既便于灵活部署又降低制造成本。
5.一种冲压自动化连线作业工艺布局,包括拉伸区、冲压成形区和中转机械臂,其中,拉伸区用于将待拉伸零件进行拉伸,得到待冲压零件;冲压成形区用于将待冲压零件进行冲压成形,得到目标零件;中转机械臂用于从拉伸区获取待冲压零件,并转送至冲压成形区。
6.一种冲压自动化连线作业方法,应用在上所述的冲压自动化连线作业工艺布局上,并包括:
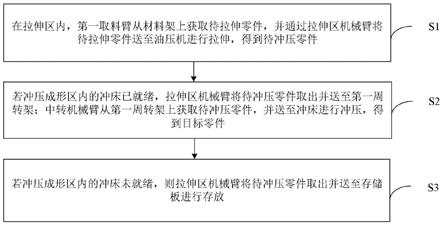
7.在拉伸区内,第一取料臂从材料架上获取待拉伸零件,并通过拉伸区机械臂将待拉伸零件送至油压机进行拉伸,得到待冲压零件;
8.若冲压成形区内的冲床已就绪,拉伸区机械臂将待冲压零件取出并送至第一周转架;中转机械臂从第一周转架上获取待冲压零件,并送至冲床进行冲压,得到目标零件;
9.若冲压成形区内的冲床未就绪,则拉伸区机械臂将待冲压零件取出并送至存储板进行存放。
10.上述冲压自动化连线作业工艺布局及方法,设立了拉伸区和冲压成形区,其中,拉伸区包括油压机,用于对待拉伸零件进行拉伸操作,得到待冲压零件;冲压成形区包括冲床,用于对待冲压零件进行冲压成形操作,得到最终所需的目标零件;中转机械臂,用于在两个操作区(拉伸区和冲压成形区)之间形成零件流动方向,适时将完成拉伸的零件传至冲压成形区,解决了油压机和冲床工作速度不匹配,致使拉伸工序不能与冲压、成形工序同步的问题,实现了前后工序的自动化连线作业,提高生产效率。
11.此外,在部署上,拉伸区和冲压成形区可以为彼此独立的生产线,使得拉伸工序既可连线于整条冲压、成形生产中,也可独立于整条线生产之外;尤其当用于拉伸的模具或用于冲压、成形的模具出现问题时,拉伸工序或冲压成形工序不受对方影响,仍可正常工作;
同时,相较于现有技术,油压机和拉伸模具只需单套即可,节约了制造成本,避免了设备资源的浪费。
附图说明
12.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
13.图1是本发明一实施例中冲压自动化连线作业工艺布局的示意图;
14.图2是本发明一实施例中冲压自动化连线作业方法的流程图。
具体实施方式
15.下面将结合本发明一些实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.在一实施例中,提供一种冲压自动化连线作业工艺布局,如图1所示,由拉伸区a和冲压成形区b组成。拉伸区是指用于零件拉伸的产线区域,拉伸区具体包括:
17.材料架a1,用于存放待拉伸零件,待拉伸零件即输入拉伸区的物料、零件等。
18.第一取料臂a2,即机械手,用于从材料架上获取待拉伸零件;
19.第一传递带a3,用于放置由第一取料臂从材料架上获取的待拉伸零件;具体为皮带或传送带等,可循环向前滚动,以提供零件输送的效率。
20.拉伸区机械臂a4,即机械手,用于在材料架和油压机之间取放待拉伸零件,并且在油压机和第一周转架之间取放待冲压零件,优选地为多角度运转的机械手。
21.油压机a5,用于对待拉伸零件进行拉伸操作的机械设备,具体型号不限。
22.第一周转架a6,用于存放待冲压零件,待中转机械臂取用;即,当通过油压机拉伸完成的待冲压零件由拉伸区机械臂取出后,放入第一周转架。
23.中转机械臂a7,用于在拉伸区和冲压区调度待冲压零件,具体地,中转机械臂从第一周转架上取出待冲压零件,并送至冲压区的冲床上。
24.冲压区具体包括:冲床b1,优选为双轴冲床,用于对待冲压零件进行冲压成形。
25.进一步地,冲床的数量为两台或以上,冲床之间通过冲压区机械臂传送冲压成形过程中的半成品零件;即,冲床还包括b2、b3,分别用于冲裁、冲剪等工序;在冲床之间设有冲压区机械臂b4、b5,与拉伸区的机械臂类似,用于调度;半成品零件是指待冲压零件经过加工但为达目标零件时的中间产品。
26.在本实施例中,零件的运动轨迹线依次经过a1、a2、a3、a4、a5、a6、a7、b1、b2、b3,并最终得到目标零件,即,对应图1中零件运动轨迹l1和l4。其中,拉伸区机械臂和中转机械臂的取料速度相匹配,以弥补油压机和冲床工作速度不同步的缺陷,使得整个产线形成自动化连线作业,提高生产效率。
27.进一步地,在一实施例中,拉伸区还包括:
28.存储板a8,设置在拉伸区机械臂的工作范围内,并用于存放由拉伸区机械臂从第一周转架上取出的待冲压零件。
29.第二周转架a9,用于存放待冲压零件;
30.第二取料臂a10,与第一取料臂作用相同,设置在第二周转架处,并用于从第二周转架上获取待冲压零件。
31.第二传递带a11,部署在中转机械臂的工作范围内,用于放置由第二取料臂从第二周转架上获取的待冲压零件,即,中转机械臂可以通过转动方向从第二传递带上取料;第二传递带与第一传递带作用相同,用于提高输送效率。
32.在本实施例中,当存储板上存放有足够数量的待冲压零件时,将这些待冲压零件分流至第二周转架,由第二取料臂从第二周转架上取出并送至冲床;其中,从存储板至第二周转架形成新的零件流动方向,即对应图1中a8至a9形成的l2;从第二周转架经第二取料臂、第二传递带、中转机械臂至冲床形成另一新的零件流动方向,即对应图1中沿a9、a10、a11、a7形成的l3。l2和l3相当于l1、l4主线的支线,便于灵活的拆分/组合拉伸、冲压的工序,提高产线兼容、纠错能力。
33.在一实施例中,提供一种冲压自动化连线作业方法,应用在上所述的冲压自动化连线作业工艺布局上,其主要流程如图2所示,并包括如下步骤:
34.s1:在拉伸区内,第一取料臂从材料架上获取待拉伸零件,并通过拉伸区机械臂将待拉伸零件送至油压机进行拉伸,得到待冲压零件。
35.第一取料臂a2自材料架a1上取料放于传递带a3上,拉伸区机械臂a4将待拉伸零件自传递带a3上抓取,然后放于油压机a5上进行拉伸动作,得到待冲压零件。
36.其中,在传递带上可对待拉伸零件进行位置校正,以便于抓取,油压机采用630t油压机。
37.s2:若冲压成形区内的冲床已就绪,拉伸区机械臂将待冲压零件取出并送至第一周转架;中转机械臂从第一周转架上获取待冲压零件,并送至冲床进行冲压,得到目标零件。
38.根据冲压形成区内冲床是否就绪进行不同操作。冲床就绪与否,具体包括设备工作状态是否正常、相应的冲压模具是否就绪等。当冲床已就绪,拉伸完后拉伸区机械臂a4将待冲压零件自630t油压机a5上取出并送至第一周转架a6,用于暂存待冲压零件。
39.中转机械臂a7从第一周转架上获取料,并将之放于250t冲床b1上进行冲裁动作,然后通过拉伸区机械臂b4至250t冲床b2,再有拉伸区机械臂b5送至250t冲床b3,依次进行动作,得到最终目标零件,即,待拉伸零件沿轨迹l1、l4输送。
40.s3:若冲压成形区内的冲床未就绪,则拉伸区机械臂将待冲压零件取出并送至存储板进行存放。
41.具体地,若冲床未就绪,则拉伸区机械臂a4将待冲压零件取出并送至存储板进行存。存储板用于分流待冲压零件,便于待拉伸零件沿轨迹l2、l3并最终并入l4进行输送,以进一步优化油压机和冲床工作进度的同步速度。
42.进一步地,在一实施例中,冲压自动化连线作业方法还包括如下步骤:
43.s4:获取存储板上待冲压零件的数量,若待冲压零件的数量超过第一预设值,则转移待冲压零件至第二周转架。
44.具体地,存储板a8上待冲压零件的数量可以通过传感器计数得到;第一预设值随实际产线情况灵活设置;当存储板上待冲压零件的数量达到第一预设值的临界线,可以通过电瓶车或其他方式将存储板上的待冲压零件转移至第二周转架a9暂存。从存储板a8至第二周转架a9,即对应零件输送轨迹l2。
45.s5:在第二周转架,第二取料臂将待冲压零件取出,并由中转机械臂将待冲压零件送至冲床。
46.第二取料臂a10从第二周转架a9取料并送至第二传递带a11,中转机械臂a7从第二传递带a11取料,并送至冲床。即,从第二周转架a9、第二取料臂a10、第二传递带a11至中转机械臂a7,对应零件输送轨迹l3,从而是l3和l4相接,形成完整的零件输送轨迹。
47.进一步地,在一实施例中,冲压自动化连线作业方法还包括如下步骤:
48.s6:获取第一周转架上待冲压零件的数量,若待冲压零件的数量超过第二预设值,则拉伸区机械臂将待冲压零件取出并送至存储板,中转机械臂将从第一周转架上获取待冲压零件并送至冲床。
49.具体地,第一周转架a6上待冲压零件的数量可以通过传感器计数得到;第二预设值随实际产线情况灵活设置,用于平衡拉伸区机械臂a4和中转机械臂a7的工作压力。当第一周转架上待冲压零件的数量超过第二预设值,则说明第一周转架过载,中转机械臂面临过大的工作压力,此时将部分待冲压零件分流到存储板,进而转移至第二周转架以缓解中转机械臂的工作负荷;而剩余部分待冲压零件仍由中转机械臂处理。
50.s7:若待冲压零件的数量未超过第二预设值,则拉伸区机械臂将待冲压零件取出并送至第一周转架;中转机械臂从第二周转架获取待冲压零件并送至冲床。
51.当第一周转架上待冲压零件的数量未超过第二预设值,则说明第一周转架还可以承接更多待冲压零件,此时拉伸区机械臂4将待冲压零件取出并送至第一周转架,中转机械臂主要从第二周转架获取待冲压零件并送至冲床。
52.在本实施例中,通过传感器等方式获取第一周转架上待冲压零件的数量,并以此平衡拉伸区机械臂和中转机械臂的工作负荷,由此带动零件输送轨迹l1、l2、l3和l4联动工作,真正实现拉伸与冲压、成形“全负荷”工作,减少物料等待时间,提高生产效率。
53.为了便于理解,以目标零件为抽油烟机集烟罩为例,本冲压自动化连线作业方法的完整步骤如下:
54.1)轨迹l1和l4:第一取料臂a2从材料架a1上取料送至第一传递带a3;拉伸区机械臂a4从第一传递带a3取料送至油压机a5;在油压机完成拉伸后,拉伸区机械臂a4从油压机a5处取料并送至第一周转架a6;中转机械臂a7从第一周转架a6取料并送至冲床b1;此后,从冲床b1依次经过冲压区机械臂b4、冲床b2、冲压区机械臂b5、冲床b3后,得到目标零件。
55.2)轨迹l1和l2:在油压机完成拉伸后,拉伸区机械臂a4从油压机a5处取料并送至存储板a8,通过电瓶车或其他方式将待冲压零件从存储板a8上转移至第二周转架a9。
56.3)轨迹l2、l3和l4:第二取料臂a10从第二周转架a9上取料并送至第二传递带a11;中转机械臂a7从第二传递带a11上取料并送至冲床b1;从冲床b1至冲床b3的过程与上述步骤1)相同,此处不再赘述。
57.综上,在第一、二取料臂、拉伸区机械臂、中转机械臂等的共同配合下,形成连续地联动作业,实现冲压自动化过程。
58.以上所述实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1