一种大型套筒件内壁再制造修复装置与方法
1.本发明属于机械制造技术领域,涉及一种大型套筒件内壁再制造修复装置,本发明还涉及一种大型套筒件内壁再制造修复方法。
背景技术:
2.大型套筒类零件,如煤矿用的液压支护采用以水为介质的液压缸体,由于水介质的腐蚀性,导致液压缸内壁因长期腐蚀而失效。由于液压支护应用量非常大,如果直接将这些失效的液压支护淘汰,必然造成很大的浪费,并污染环境,因此,探寻液压支护回收利用和再制造技术,对提升该行业经济效益和推动行业技术进步具有重要意义。
3.液压支护失效的主要原因是其缸体内壁腐蚀造成漏水,进而使支护失效,直接关系到矿井的施工安全,该缸体内壁就是下文的缸体内孔面,因此修复缸体内孔是关键,而液压支护的缸体就属于大型套筒件。
技术实现要素:
4.本发明的目的是提供一种大型套筒件内壁再制造修复装置,解决现有技术中的大型套筒件难以实现内壁自定位、在现有机床上不方便装夹调整的问题。
5.本发明的另一个目的是提供一种大型套筒件内壁再制造修复方法,通过基准翻转实现大型套筒件内壁均匀加工,提高该产品使用寿命与使用性能的方法。
6.本发明采用的技术方案是,一种大型套筒件内壁再制造修复装置,包括依次安装在床身上的床鞍二、主轴箱、床鞍一、中间支架和动力支架,主轴箱的内腔中沿轴向设置有四爪夹盘套筒主轴,主轴箱外部横向对称设置有四套调节组件,两两相对;
7.主轴箱的顶部沿轴向设置有导轨丝杠模组,导轨丝杠模组与电机一驱动连接,导轨丝杠模组的滑槽中设置有回摆机构,回摆机构的回转臂固定连接有测量杆,测量杆上安装有四个位移传感器;
8.床鞍一与电机三驱动连接,在床鞍一上设置有滑座一,滑座一与电机二驱动连接,滑座一上固定有刀台一,刀台一上固定有螺纹车刀一和外圆车刀一,滑座一上的所有部件一起称为车刀架q1;
9.动力支架与电机四驱动连接,中间支架与电机五驱动连接,在中间支架和动力支架上共同支撑有镗杆,镗杆的前端设置有镗削刀头。
10.本发明采用的另一技术方案是,一种大型套筒件内壁再制造修复方法,利用上述的大型套筒件内壁再制造修复装置,按照以下步骤实施:
11.步骤1、固定大型套筒件,将大型套筒件放入四爪夹盘套筒主轴中,通过四爪夹盘套筒主轴的前夹爪、后夹爪将大型套筒件固定牢靠;
12.步骤2、将测量架伸入大型套筒件内腔中,使得位移传感器d1、d2分别与前夹爪、后夹爪所在横截面对应,这时,位移传感器d1、d2与四爪夹盘套筒主轴的回转中心的偏移量通过机床结构尺寸和数控系统确定,设为p0;
13.步骤3、测量与绘制大型套筒件的内孔曲线,
14.启动四爪夹盘套筒主轴和大型套筒件旋转,以x轴为参考位置开始记录角度信息θi,通过位移传感器d1、d2采集位移信息qi,根据所采集到的位移和角度信息绘制大型套筒件的内圆曲线图,该内圆曲线图的坐标如下:
[0015][0016]
步骤4、确定偏心位置和夹爪位移量,
[0017]
对大型套筒件的内圆曲线图进行圆拟合,并确定出圆心位置,即求解出大型套筒件的内孔中心位置,得到偏心量r和偏心角进一步确定出大型套筒件在x、y方向的偏移量,即
[0018]
若前夹爪位置处得到了内圆的偏心量r1和偏心角后夹爪位置处得到了内圆的偏心量r2和偏心角则每个夹爪的位移量如下:
[0019]
前夹爪a1、前夹爪a4的位移量为
[0020]
前夹爪a2、前夹爪a3的位移量为
[0021]
后夹爪b1、后夹爪b4的位移量为
[0022]
后夹爪b2、后夹爪b3的位移量为
[0023]
夹爪的位移量方向按照坐标轴的正负来确定,进而确定出各个夹爪的拧紧或放松状态;
[0024]
步骤5、按照逻辑顺序实施夹爪的拧紧和放松;
[0025]
步骤6、检测偏心量是否满足要求,若不满足要求,重复上述步骤2-步骤5,直到满足偏心调节要求为止;
[0026]
步骤7、满足偏心要求后,再分别控制调节组件w1、调节组件w2、调节组件w3、调节组件w4,将所有夹爪拧紧到预定值,使大型套筒件装夹牢靠,偏心调整结束;
[0027]
步骤8、镗削大型套筒件的内孔面c到预定盈余尺寸,同时车削大型套筒件前、后两端处的外台阶面e1、e2;取下大型套筒件,给内孔面c和内螺纹面c1、c2熔覆新的金属层;
[0028]
步骤9、将熔覆后的大型套筒件放入四爪夹盘套筒主轴中,通过四爪夹盘套筒主轴的前夹爪、后夹爪固定住大型套筒件;
[0029]
步骤10、将测量架伸入大型套筒件内腔中,利用伸缩机构,使安装在测量架上的位移传感器d3、d4分别与大型套筒件两端的外台阶面e1、e2相对应,这时,位移传感器d3、d4与四爪夹盘套筒主轴的回转中心的偏移量通过机床结构尺寸和数控系统确定,设为p1;
[0030]
按照步骤3-步骤7进行大型套筒件的偏心测量和偏心调整,直到满足偏心调整要求;
[0031]
步骤11、对调整好偏心的大型套筒件内孔面c进行镗削,对内螺纹面c1、c2进行车螺纹加工,直到满足技术要求,即成。
[0032]
本发明的有益效果是,1)采用再制造思想,在大型套筒件内孔面熔覆一层新的金属,然后再对熔覆后的内孔面进行加工,以满足缸孔尺寸要求;本发明的方法,首先以内孔面定位进行该内孔面加工,再将该内孔面的定位基准翻转到大型套筒件的前、后端处的外
圆上;然后对内孔面进行金属熔覆操作,再以翻转好的外台阶面为基准,通过夹爪调节大型套筒件的偏心,通过镗削方法实现内孔面加工,大大提高加工效率。2)本发明方法实现了对失效大型套筒件内孔面进行再制造修复或通过双金属方法以提高其耐腐蚀性能;实现大型套筒件偏心调整的自动化,避免了过度依赖操作者经验而影响加工效率和加工精度等问题,再制造更快捷、加工质量更好,对提高企业经济效益、节省资源、保护环境、减少碳排放等具有重要意义。
附图说明
[0033]
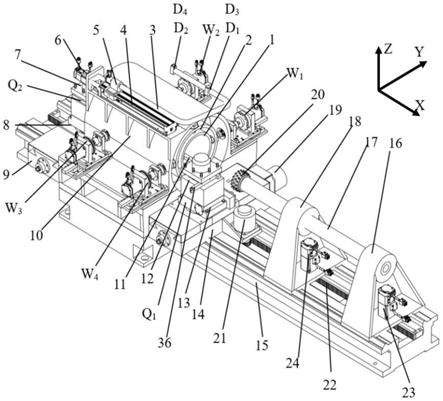
图1是本发明装置的总体结构示意图;
[0034]
图2是本发明装置中的调节组件与四爪夹盘的横截面安装示意图;
[0035]
图3是本发明方法加工对象的大型套筒件内壁修复原理简图;
[0036]
图4是本发明方法以内孔为定位基准的大型套筒件偏心测量原理简图;
[0037]
图5是本发明方法的大型套筒件1偏心量计算原理简图;
[0038]
图6是本发明方法以外台阶面为定位基准的大型套筒件偏心测量原理简图。
[0039]
图中,1.大型套筒件,2.四爪夹盘套筒主轴,3.测量架,4.导轨丝杠模组,5.回摆机构,6.电机一,7.刀台二,8.滑座二,9.床鞍二,10.主轴箱,11.螺纹车刀一,12.刀台一,13.滑座一,14.床鞍一,15.床身,16.动力支座,17.镗杆,18.中间支座,19.电机二,20.镗削刀头,21.电机三,22.精密齿轮齿条传动机构,23.电机四,24.电机五,25.夹爪,26.支撑架,27.转轴,28.支撑座,29.伺服电机,30.缸体,31.导轨条,32.导轨块,33.滑座,34.底座,35.伸缩机构,36.外圆车刀一;
[0040]
另外,w1、w2、w3、w4分别表示调节组件,d1、d2、d3、d4分别表示位移传感器,q1、q2分别表示前、后镗车时的车刀架,c表示待修复的大型套筒件内孔面,c1、c2分别表示待修复的大型套筒件内螺纹面,e1、e2分别表示大型套筒件的前、后端处的外台阶面,f表示大型套筒件的外圆柱面;a表示前夹爪位置,b表示后夹爪位置,a1、a2、a3、a4分别表示四个前夹爪,b1、b2、b3、b4分别表示四个后夹爪。
具体实施方式
[0041]
下面结合附图和具体实施方式对本发明作进一步详细说明。
[0042]
参照图1、图2,本发明装置的总体结构是,包括依次安装在床身15上的床鞍二9、主轴箱10、床鞍一14、中间支架18和动力支架16,在主轴箱10的内腔中沿轴向(x方向)设置有四爪夹盘套筒主轴2,四爪夹盘套筒主轴2中牢靠夹紧有作为加工对象的大型套筒件1,四爪夹盘套筒主轴2在主轴箱10中做回转运动;在主轴箱10外部横向(沿y方向)对称设置有四套调节组件,两两相对,简称为w1、w2、w3、w4,用于四爪夹盘套筒主轴2的前、后四爪的自动拧紧和松开操作;
[0043]
在主轴箱10的顶部沿轴向设置有导轨丝杠模组4,导轨丝杠模组4与电机一6驱动连接,导轨丝杠模组4的滑槽中设置有回摆机构5,回摆机构5的回转臂固定连接有测量杆3,测量杆3上安装有四个位移传感器,分别是d1、d2、d3、d4;导轨丝杠模组4在电机一6的驱动下,通过回摆机构5带动测量杆3沿x方向移动,同时回摆机构5可以使测量杆3实现回转摆动,从而使位移传感器d1、d2进入大型套筒件1内部,进而实现大型套筒件1的内孔偏心检测;
见图4,位移传感器d1、d2之间的测量杆3设置有伸缩机构35,以便调节位移传感器之间的距离,使得位移传感器与前、后夹爪位置处对应;见图6,同样可以利用导轨丝杠模组4、电机一6、回摆机构5、伸缩机构35使测量杆3上的位移传感器d3、d4之间与外台阶面e1、e2对应,以实现外台阶面e1、e2的偏心测量。
[0044]
床鞍一14通过精密齿轮齿条传动机构22套装在床身15中,床鞍一14与电机三21驱动连接,床鞍一14在床身15上在电机三21的驱动下通过精密齿轮齿条传动机构22实现沿x向的进给运动,从而达到大型套筒件1内孔前端的螺纹加工;在床鞍一14上设置有滑座一13,滑座一13与电机二19驱动连接,滑座一13在电机二19的驱动下在床鞍一14顶部沿y方向进给;滑座一13上固定有刀台一12,刀台一12上固定有螺纹车刀一11和外圆车刀一36,滑座一13上的所有部件一起称为车刀架q1;车刀架q1位于四爪夹盘套筒主轴2的前端位置,同时,在四爪夹盘套筒主轴2的后端位置设置有车刀架q2,车刀架q2包括设置在床鞍二9上的滑座二8、刀台二7、螺纹车刀二及外圆车刀二,该两套车刀架的结构及工作原理相同,实现对大型套筒件1的前、后端的内螺纹面和外台阶面的加工;车刀架q1、q2可绕自身轴线回转,以实现车螺纹和车外圆换刀操作。
[0045]
动力支架16与电机四23驱动连接,中间支架18与电机五24驱动连接,电机四23和电机五24均通过精密齿轮齿条传动机构22与床身15啮合连接,电机四23和电机五24同样通过精密齿轮齿条传动机构22实现动力支架16和中间支架18在床身15的进给运动,在中间支架18和动力支架16上共同支撑有镗杆17,镗杆17的前端设置有镗削刀头20;在动力支架16的带动下,在床身15的导轨上沿x向进给,实现大型套筒件1内孔的镗削工序加工;中间支架18对镗杆17起到辅助支撑的作用,以提高镗削系统的刚度。
[0046]
参照图2,本发明的四套调节组件与四爪夹盘之间的安装关系是,在四爪夹盘套筒主轴2的前、后端沿径向均布设置有8个夹爪25(包括四个前夹爪和四个后夹爪);
[0047]
每一套调节组件的结构是,包括固定在主轴箱10上的底座34和缸体30,在底座34上通过导轨块32和导轨条31滑动设置有滑座33,滑座33与缸体30驱动连接,在滑座33上通过支撑架26支撑安装有转轴27,在滑座33上还通过支撑座28固定安装有伺服电机29,转轴27与伺服电机29驱动连接;
[0048]
根据需要,每一套调节组件上可设置两根导轨条或一根导轨条,每个导轨条上可设置两个导轨块或一个导轨块。
[0049]
四套调节组件的调整方法相同,大型套筒件1被四爪夹盘套筒主轴2的前、后端均布设置的四个夹爪25固定和定位,当其中的两个夹爪25位于水平位置时,缸体30通过滑座33向内推动转轴27与夹爪25啮合对接,然后伺服电机29驱动转轴27带动夹爪25转动,夹爪25内端头向内顶紧大型套筒件1或向外离开大型套筒件1,实现夹爪25对大型套筒件1的拧紧或放松,以实现大型套筒件1的内孔中心与夹盘套筒主轴2的回转中心的偏心调节。
[0050]
参照图3,本发明方法的加工对象为大型套筒件1,其结构是,该大型套筒件1的外圆柱面f为毛面,无法作为定位基准面;其内孔包括两个部分,中间段为光滑内孔面c,两端内段分别为内螺纹面c1、c2,需要修复的表面为c、c1、c2,统称为大型套筒件的内壁面;内螺纹面c1、c2要求修复后的连接强度好,并且内孔面c与内螺纹面c1、c2要同轴,因此必须以内孔面c作为原始定位基准来开展相关的修复制造工作,才能满足上述的技术要求,其加工流程如下:
[0051]
1)通过四爪夹盘套筒主轴2的夹爪25将大型套筒件1在a、b处预装夹到机床上;
[0052]
2)以内孔面c作为定位基准找正a、b处的夹爪25,使内孔面c与机床主轴的回转中心重合,这时的加工基准就是内孔面c;
[0053]
3)对e1、e2两个外台阶面进行精加工,即将内孔面c定位基准翻转到e1、e2两个外台阶面上;
[0054]
4)对内孔面c进行镗削处理;
[0055]
5)取下大型套筒件1,通过焊接熔覆方式,或激光熔覆方式,或离心浇铸方式给c、c1、c2表面熔覆一层同类或异类金属;
[0056]
6)将熔覆后的大型套筒件1通过a、b处的夹爪25重新装夹到机床上;
[0057]
7)以e1为定位基准调节a处的夹爪25,以e2为定位基准调节b处的夹爪25,使e1、e2与机床主轴回转中心重合,这样就保证了加工后的内孔面c熔覆厚度的均匀性,同时也保证了c1、c2处的螺纹修复厚度的均匀性;
[0058]
8)先通过镗削工艺加工内孔面c,再通过车螺纹工艺修复c1、c2处的内螺纹表面,完成大型套筒件1的再制造修复。
[0059]
参照图4,是本发明的以内孔为定位基准的大型套筒件1在四爪夹盘套筒主轴2中的偏心测量示意图。对大型套筒件1进行偏心测量时,通过电机一6驱动及回摆机构5的回转,配合调整测量架3的回转角度,并通过伸缩机构35使安装在测量架3上的位移传感器(d1、d2)分别与四爪夹盘套筒主轴2上固定安装的前夹爪位置a、后夹爪位置b相对应,当四爪夹盘套筒主轴2带着大型套筒件1旋转时,通过位移传感器(d1、d2)分别测量出所对应夹爪位置的大型套筒件1的内孔偏心量,进而绘制出大型套筒件1的内孔尺寸变化曲线,准确得到大型套筒件1在四爪夹盘套筒主轴2中的偏心量及偏心位置。
[0060]
参照图5,是本发明方法确定各夹爪的调整方向及其调整量的原理图,以前夹爪为例,对大型套筒件1偏心量的计算过程是,假设四爪夹盘套筒主轴2的回转中心为o,大型套筒件1的内孔回转中心为o1,则以四爪夹盘套筒主轴2的回转中心o为原点建立直角坐标系,以前夹爪a1与前夹爪a4的连线为x轴,以前夹爪a2与前夹爪a3的连线为y轴;通过数控系统设置得到位移传感器d1偏离四爪夹盘套筒主轴2的回转中心o的位置和方位,根据位移传感器d1所测得的位移数据,绘制出如图5所示的大型套筒件1的内圆轮廓图,经过数学回归处理,计算出大型套筒件1的内圆圆心的偏心距r及其与x轴的偏心夹角
[0061]
本发明调偏心的目的就是使大型套筒件1的回转中心o1与四爪夹盘套筒主轴2的回转中心o重合,根据图5所给出的实施例,通过数学计算能够得出,沿x方向左移沿y方向下移就能够实现大型套筒件1的回转中心o1与四爪夹盘套筒主轴2的回转中心o重合,这样就确定出了各个前夹爪的调整方向及其调整量大小;
[0062]
同理,也能够确定出位置b处各后夹爪的偏心量,以四爪夹盘套筒主轴2的回转中心o为原点建立直角坐标系,以后夹爪b1与后夹爪b4为x轴,以后夹爪b2与后夹爪b3为y轴,同样也能够绘制出后夹爪各处的大型套筒件1的内圆曲线图,进而确定出各后夹爪的调整方向及其调整量大小。
[0063]
最后,根据上面两个原理确定的各个夹爪的调整量,控制系统再操纵电机带动四爪夹盘套筒主轴2进行旋转,分别通过四个调节组件(w1、w2、w3、w4)实现偏心调整。
[0064]
参照图6,是本发明的以外台阶面定位的大型套筒件偏心测量示意图。当大型套筒件1内孔面熔覆新金属以后,需要对该件的内孔进行再加工,为了保证内孔熔覆层的均匀性,加工基准为大型套筒件1两端的外台阶面e1、e2,因此需以外台阶面e1、e2为基准对大型套筒件1进行偏心调整。
[0065]
首先对大型套筒件1进行偏心测量,对大型套筒件1进行偏心测量时,通过电机一6驱动配合回摆机构5的回转,调整测量架3回摆角度,并通过利用伸缩机构35使安装在测量架3上的位移传感器(d3、d4),分别与大型套筒件1两端的外台阶面(e1、e2)相对应,当四爪夹盘套筒主轴2带着大型套筒件1旋转时,通过位移传感器(d3、d4)分别测量出大型套筒件1所对应位置处外台阶面的偏心量,进而绘制出大型套筒件1两端的外台阶面(e1、e2)外圆的空间轨迹曲线,再通过图5的方法可以得到大型套筒件1在四爪夹盘套筒主轴2中的偏心量及偏心位置。
[0066]
本发明在测量架3上设置四个位移传感器,设置在外侧的位移传感器(d1、d2)用于大型套筒件1的内孔c的偏心测量,设置在里侧的位移传感器(d3、d4)用于大型套筒件1的两端外台阶面(e1、e2)的偏心测量,内外侧的两套位移传感器互不干扰。
[0067]
综上所述,本发明方法,基于上述装置的结构布局、测量及调节原理,按照以下步骤实施:
[0068]
步骤1、固定大型套筒件1,将大型套筒件1放入四爪夹盘套筒主轴2中,通过四爪夹盘套筒主轴2的前夹爪、后夹爪将大型套筒件1固定牢靠;
[0069]
步骤2、将测量架3伸入大型套筒件1内腔中,使得位移传感器d1、d2分别与前夹爪、后夹爪所在横截面对应,位移传感器d1、d2与四爪夹盘套筒主轴2的回转中心的偏移量通过机床结构尺寸和数控系统确定,设为p0;
[0070]
步骤3、测量与绘制大型套筒件1的内孔曲线,
[0071]
启动四爪夹盘套筒主轴2和大型套筒件1旋转,以x轴为参考位置开始记录角度信息θi,通过位移传感器d1、d2采集位移信息qi,根据所采集到的位移和角度信息绘制大型套筒件1的内圆曲线图,该内圆曲线图坐标如下:
[0072][0073]
步骤4、确定偏心位置和夹爪位移量,
[0074]
对大型套筒件1的内圆曲线图进行圆拟合,并确定出圆心位置,即求解出大型套筒件1的内孔中心位置,得到偏心量r和偏心角进一步确定出大型套筒件1在x、y方向的偏移量,即
[0075]
若前夹爪位置处得到了内圆的偏心量r1和偏心角后夹爪位置处得到了内圆的偏心量r2和偏心角则每个夹爪的位移量如下:
[0076]
前夹爪a1、前夹爪a4的位移量为
[0077]
前夹爪a2、前夹爪a3的位移量为
[0078]
后夹爪b1、后夹爪b4的位移量为
[0079]
后夹爪b2、后夹爪b3的位移量为
[0080]
夹爪的位移量方向按照坐标轴的正负来确定,进而确定出各个夹爪的拧紧或放松
状态;
[0081]
步骤5、按照逻辑顺序实施夹爪的拧紧和放松,
[0082]
由于各个调节组件只能对位于水平方向对应的夹爪25进行拧紧和放松,参照图1、图2和图5,以图5所给出的偏心调节为例,大型套筒件1的偏心调节按照下述逻辑顺序进行:
[0083]
5.1)大型套筒件1逆时针旋转900,使前夹爪a3、后夹爪b3位于水平左侧位置,分别与调节组件w4、调节组件w3对应;
[0084]
5.2)通过调节组件w4、调节组件w3使前夹爪a3、后夹爪b3放松,然后,大型套筒件1顺时针旋转900,使前夹爪a1、前夹爪a4、后夹爪b1、后夹爪b4位于水平位置,并分别与调节组件w4、调节组件w1、调节组件w3、调节组件w2对应;
[0085]
5.3)根据计算出的大型套筒件1在x向的偏心量转换成的夹爪位移量,先使调节组件w4、调节组件w3分别对前夹爪a1、后夹爪b1进行放松操作,放松移动量采用本步骤计算出来的夹爪位移量,再使调节组件w1、调节组件w2分别对前夹爪a4、后夹爪b4进行拧紧操作,达到初拧紧值(取值范围为8-10公斤)即可,从而实现x方向的偏心调整;
[0086]
5.4)继续将大型套筒件1顺时针旋转900,使前夹爪a2、前夹爪a3、后夹爪b2、后夹爪b3位于水平位置,并分别与调节组件w4、调节组件w1、调节组件w3、调节组件w2对应;
[0087]
5.5)根据计算出的大型套筒件1在y方向偏心量转换成的夹爪位移量,使调节组件w4、调节组件w3分别对前夹爪a2、后夹爪b2进行相应的放松操作,放松移动量采用本步骤计算出来的夹爪位移量,然后使调节组件w1、调节组件w2分别对前夹爪a3、后夹爪b3进行相应的拧紧操作,达到初拧紧值(取值范围为8-10公斤)即可,以实现y方向的偏心调整;
[0088]
步骤6、检测偏心量是否满足要求,若不满足要求,重复步骤2-步骤5,直到满足偏心调节要求为止;
[0089]
步骤7、满足偏心要求后,再分别控制调节组件w1、调节组件w2、调节组件w3、调节组件w4将所有夹爪拧紧到预定值(取值范围为40-70公斤),使大型套筒件1装夹牢靠,偏心调整结束。
[0090]
步骤8、镗削大型套筒件1的内孔面c到预定盈余尺寸,同时车削大型套筒件1前、后两端处的外台阶面e1、e2;取下大型套筒件1,并通过焊接熔覆或激光熔覆(或其他方法)给内孔面c和内螺纹面c1、c2熔覆新的金属层;
[0091]
步骤9、将熔覆后的大型套筒件1放入四爪夹盘套筒主轴2中,通过四爪夹盘套筒主轴2的前夹爪、后夹爪固定住大型套筒件1;
[0092]
步骤10、将测量架3伸入大型套筒件1内腔中,利用伸缩机构35使安装在测量架3上的位移传感器d3、d4,分别与大型套筒件1两端的外台阶面e1、e2相对应,这时,位移传感器d3、d4与四爪夹盘套筒主轴2的回转中心的偏移量通过机床结构尺寸和数控系统确定,设为p1;
[0093]
按照步骤3-步骤7进行大型套筒件1的偏心测量和偏心调整,直到满足偏心调整要求。
[0094]
步骤11、对调整好偏心的大型套筒件1内孔面c进行镗削,对内螺纹面c1、c2进行车螺纹加工,直到满足技术要求,即成。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1