驱动装置以及驱动装置的组装方法与流程
1.本发明涉及一种驱动装置以及驱动装置的组装方法。
背景技术:
2.以往,在组装包括电机、减速器向臂的组装这样的作业的工业用机器人的情况下,将具有壳体的市售的伺服电机和市售的减速器接合多个夹设构件而组装驱动装置。此外,作为对减速器的润滑脂进行密封的方法,在专利文献1的旋转机械的油封保护装置中记载的现有例中,在轴上设置油封,防止减速器内部的润滑脂侵入电机内部。
3.专利文献1:日本特开平10-19133号公报
4.在接合多个夹设部件而组装臂、减速机、以及电机等的情况下,需要注入发挥润滑功能的润滑脂。这种情况下,润滑脂有可能侵入电机内。
技术实现要素:
5.一种驱动装置,具有:电机,具有轴;波发生器,在所述轴的轴向上具有第一厚度;波动齿轮装置,由沿所述波发生器的外周挠曲变形的柔性齿轮和刚性齿轮构成,所述刚性齿轮经由所述柔性齿轮而与所述波发生器的旋转联动并且在所述轴的所述轴向上具有大于所述第一厚度的厚度;至少一个夹设部件,兼用作所述电机的壳体,并具有用于固定所述刚性齿轮的一部分的凸缘;以及油封,固定于所述凸缘的内侧,沿着所述轴的外周;在包含所述轴的轴线的截面上,从相对于所述轴线垂直方向观察的情况下,使所述波发生器向与所述凸缘相反的方向靠近,从而由所述轴、固定于所述轴的所述波发生器、所述柔性齿轮、所述刚性齿轮、所述凸缘以及所述油封构成内部空间,在用润滑脂填充所述内部空间的基础上,在所述轴的所述轴向上,使所述油封与所述波发生器之间的距离小于其他部件之间的距离。
6.一种驱动装置的组装方法,在将具有轴的电机、具有波发生器的波动齿轮装置、兼用作所述电机的壳体并具有用于固定所述波动齿轮装置的一部分的凸缘的至少一个夹设部件、以及沿着所述轴的外周的油封组装的组装工序的中途,具有在由所述轴、所述波动齿轮装置、所述凸缘、所述油封构成的内部空间中填充润滑脂的工序,在所述组装工序结束后,在所述内部空间中,在所述轴的轴向上,所述油封与所述波发生器之间的距离小于其他部件之间的距离。
附图说明
7.图1是表示具备本实施方式所涉及的驱动装置的机器人的概略结构的立体图。
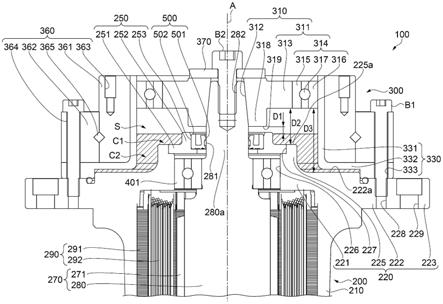
8.图2是表示本实施方式所涉及的驱动装置的概略结构的截面图。
9.图3是表示本实施方式所涉及的驱动装置的主要部分的放大图。
10.图4a是表示本实施方式所涉及的驱动装置的组装方法的图。
11.图4b是表示本实施方式所涉及的驱动装置的组装方法的图。
12.图4c是表示本实施方式所涉及的驱动装置的组装方法的图。
13.图4d是表示本实施方式所涉及的驱动装置的组装方法的图。
14.附图标记说明
15.10
…
机器人;100
…
驱动装置;200
…
电机;210
…
作为夹设构件的外壳;220
…
凸缘;280
…
轴;300
…
波动齿轮装置;310
…
波发生器;330
…
柔性齿轮;360
…
刚性齿轮;500
…
油封;a
…
作为轴线的中心轴线;c1、c2
…
位于比油封更靠铅直下方的区域;d1
…
油封与波发生器之间的距离;
16.d2、d3
…
其他部件之间的距离;g
…
润滑脂;s
…
内部空间;t1
…
第一厚度;t2
…
大于第一厚度的厚度。
具体实施方式
17.1.实施方式
18.对具备本实施方式所涉及的驱动装置100的机器人10进行说明。
19.本实施方式的机器人10能够进行精密设备、构成精密设备的零件的供件、卸件、输送以及组装等作业。
20.图1是表示具备本实施方式所涉及的驱动装置100的机器人10的概略结构的立体图。
21.如图1所示,机器人10例如是六轴的垂直多关节机器人,具备基座11、与基座11连接的机械臂12、设置于机械臂12的前端部的力检测器14、以及机械手13。另外,机器人10具备产生驱动机械臂12的动力的多个驱动装置100、以及控制多个驱动装置100的控制装置15。
22.基座11是将机器人10安装于任意的设置位置的部分。需要说明的是,基座11的设置位置没有特别限定,例如,能够列举地面、墙壁、天花板、可移动的台车上等。
23.机械臂12具备多个臂(第一臂121、第二臂122、第三臂123、第四臂124、第五臂125、第六臂126),这些臂从基端侧朝向前端侧依次连结。第一臂121连接于基座11。
24.驱动装置100从基座11向第一臂121传递驱动力,使第一臂121相对于基座11转动。在第六臂126的前端,例如,可装卸地安装有把持各种零件等的机械手13(末端执行器)。机械手13具有两根机械手指131、132,通过机械手指131、132例如能够把持各种零件等。
25.在基座11上,设置有驱动装置100。驱动装置100具有驱动第一臂121的伺服电机等电机200、以及波动齿轮装置300(减速装置)。另外,虽然省略了图示,但在各臂121至126上,也分别设置有具有电机和减速装置的多个驱动装置。并且,各驱动装置由控制装置15控制。
26.在这种机器人10中,波动齿轮装置300从基座11和第一臂121中的一个向另一个传递驱动力。具体而言,波动齿轮装置300将使第一臂121相对于基座11转动的驱动力从基座11侧向第一臂121侧传递。在此,波动齿轮装置300作为减速装置发挥功能,由此使电机200的旋转减速、提高驱动力,从而使第一臂121相对于基座11转动。
27.图2是表示本实施方式所涉及的驱动装置100的概略结构的截面图。另外,图2是以轴280的中心轴线a为中心的截面图。图3是表示本实施方式所涉及的驱动装置100的主要部分的放大图。
28.参照图2、图3,对驱动装置100进行说明。
29.需要说明的是,在图2之后,为了便于说明,在附图中,将附图的上侧作为上侧、上方向、上部,将附图的下侧作为下侧、下方向、下部进行说明。
30.如上所述,本实施方式的驱动装置100构成为具有电机200和波动齿轮装置300(减速装置)。
31.对本实施方式所涉及的电机200进行说明。
32.本实施方式的电机200使用所谓的伺服电机。具体而言,使用ac伺服电机。需要说明的是,作为电机200,没有特别限定,例如,能够列举dc伺服电机、步进电机等。如图2所示,电机200具备转子270、定子290、以及至少一个作为夹设部件的外壳210等。外壳210与后述的机壳240共同兼用作电机200的壳体。
33.如图2所示,在外壳210的上侧端部和成为外壳210的下侧的机壳240的中心部,设置有轴承401、402。另外,在外壳210的上侧端部,形成有凸缘220。需要说明的是,轴280的轴线与成为旋转的中心的中心轴线a相同。
34.轴承401、402是包含内圈和外圈而构成的滚动轴承。轴280的两端部通过过盈配合分别固定于轴承401、402的内圈。一个轴承401的外圈由后述的外壳210(凸缘220)的电机支承部221支承。另外,另一个轴承402的外圈由机壳240支承。需要说明的是,机壳240固定于外壳210。
35.电机200的轴280经由轴承401、402被外壳210和机壳240支承,并围绕中心轴线a旋转。轴280在轴承401侧的端部280a与波动齿轮装置300连结,并将驱动力传递至波动齿轮装置300。另外,轴280在轴承402侧的端部280b与检测轴280的旋转的旋转检测器260连结。
36.对电机200进行进一步说明。
37.转子270具备作为旋转轴的轴280、以及磁铁271。轴280形成为沿着中心轴线a的方向直径缩小的圆柱状。轴280由铁等软磁性材料构成。轴280经由轴承401、402围绕中心轴线a可旋转地支承。
38.磁铁271固定于沿着轴280的中心轴线a周围的外周面上。磁铁271形成为环状,并且在周向上排列配置有多个。磁铁271具有在周向上形成有多个磁极的多极结构。磁铁271例如由六个磁铁片构成,并以极性在周向上成为nsnsns的方式构成。磁铁271被定子290包围。
39.定子290围绕中心轴线a包围转子270。定子290形成为圆筒状,在周向上以规定间隔配置,并分别在作为芯的铁芯291的周围具备线圈292。
40.相对于如此构成的电机200,在交流电流流过定子290的情况下,定子290成为电磁铁,电流的方向和大小因交流而交替切换,由此定子290切换为n极、s极。与此同时,通过吸引或排斥转子270的磁铁271,转子270(轴280)进行旋转。
41.对本实施方式所涉及的外壳210进行说明。
42.如图2所示,在电机200的上侧,设置有波动齿轮装置(减速装置)300。在外壳210上,形成有凸缘220。凸缘220在外壳210的上侧端部,相对于中心轴线a在垂直方向(径向)上呈大致圆盘状延伸而形成。
43.凸缘220包括支承电机200的电机支承部221、支承波动齿轮装置300的减速装置支承部222、以及安装在基座11的壳体上的基座安装部223,这些一体地由一个零件构成。
44.在本实施方式中,电机支承部221、减速装置支承部222、以及基座安装部223作为
凸缘220(外壳210)一体地由一个零件构成,由此能够不经由其他零件而直接将驱动装置100固定于基座11。需要说明的是,在基座安装部223上,形成有用于将驱动装置100固定于基座11的固定用螺纹孔229。
45.如图2、图3所示,在作为以中心轴线a为中心的凸缘220的中心部的电机支承部221上,形成有向上方突出而形成的大致圆筒状的固定用突起部225,该固定用突起部225具有用于插通轴280以及用于在内周面上设置轴承401和油封固定部件250的开口。需要说明的是,油封固定部件250是用于固定后述的油封500的部件。
46.如图3所示,在固定用突起部225的内周面226,设置有可旋转地轴支承轴280的上述的轴承401。在内周面226的上侧,形成有设置油封固定部件250的内周面227。在本实施方式中,油封固定部件250无间隙地紧密地焊接在内周面227上,与电机支承部221成为一体。
47.在本实施方式中,包括凸缘220的外壳210以及油封固定部件250由金属部件的铝构成。需要说明的是,外壳210包括凸缘220,由铝一体成型而构成。机壳240也由铝一体成型而构成。
48.如图3所示,油封固定部件250在中心具有插通轴280的端部280a的开口而形成为环状。油封固定部件250形成为具有焊接于固定用突起部225的内周面227的主体部251、固定油封500的外周侧的壁部252、以及从壁部252形成到开口的凹部253。
49.通过在油封500设置凹部253,油封固定部件250以环状包围油封500。通过将油封500设置于油封固定部件250的凹部253,油封500的唇面501沿着轴280的外周面281紧贴。轴280在唇面501上滑动并旋转。
50.对本实施方式所涉及的波动齿轮装置300进行说明。
51.本实施方式的波动齿轮装置300是减速装置。波动齿轮装置300以高减速比对由轴280输入的驱动力的旋转进行减速并输出。在输出侧,能够得到与减速比成比例的高转矩。如图2、图3所示,波动齿轮装置300构成为具备波发生器310、柔性齿轮330、以及刚性齿轮360。
52.刚性齿轮360是由在中心轴线a的径向上实质上不挠曲的刚体构成的齿轮,并且是具备内齿(省略图示)的环状的内齿轮。刚性齿轮360经由柔性齿轮330而与波发生器310的旋转联动。
53.环状的刚性齿轮360由连结于机器人10的臂(在图1中为第一臂121)的连结部361、以及将刚性齿轮360固定于凸缘220的减速装置支承部222的固定部362这两个部位构成。另外,刚性齿轮360在轴280的中心轴线a方向上,具有大于主体部313的第一厚度t1(图2)的厚度t2(图2),该主体部313包括后述的波发生器310的突出部318。
54.连结部361在上侧端部的中心轴线a的径向内侧,具备上述的内齿(省略图示)而形成。在连结部361上,形成有用于与第一臂121连结的固定用螺纹孔363。固定部362具备固定于凸缘220的减速装置支承部222的插通孔364。
55.需要说明的是,连结部361和固定部362通过轴承365连结,连结部361构成为能够相对于固定部362旋转。需要说明的是,轴承365是所谓的交叉滚子轴承,是相对于旋转轴以+45
°
和-45
°
的角度交替地配置辊,并承受径向载荷和推力载荷这两者的轴承。
56.柔性齿轮330插通至刚性齿轮360的内侧。柔性齿轮330是具备在中心轴线a的径向上能够沿波发生器310的外周挠曲变形的具有挠性的筒状部331的齿轮,并且是具备与刚性
齿轮360的内齿啮合的外齿(省略图示)的外齿轮。外齿在筒状部331的上侧端部形成在中心轴线a的径向外侧。柔性齿轮330的齿数少于刚性齿轮360的齿数。
57.柔性齿轮330除了筒状部331之外,还具备从筒状部331的下侧端部向中心轴线a的径向外侧延伸的凸缘部332。凸缘部332配置于环状的刚性齿轮360(连结部361、固定部362)与凸缘220的减速装置支承部222之间。
58.凸缘部332与刚性齿轮360的固定部362的插通孔364相对地具备插通孔333。需要说明的是,在将刚性齿轮360的固定部362以及柔性齿轮330的凸缘部332固定于减速装置支承部222的情况下,将螺栓b1插通刚性齿轮360的固定部362的插通孔364以及柔性齿轮330的凸缘部332的插通孔333,并使其与形成于减速装置支承部222的固定用螺纹孔228螺合。
59.波发生器310具备波动发生部311以及突出部318。在波动发生部311的旋转中心,形成有供轴280的端部280a插通的插通孔312。需要说明的是,轴280的端部280a以圆柱状随着向前端侧前进直径缩小而形成。插通孔312沿着直径缩小而形成的端部280a的外周面而形成。
60.在从中心轴线a方向观察的情况下,在插通孔312的电机200侧(下侧)的周缘,突出部318具有覆盖油封500的径向的距离,在从相对于中心轴线a垂直的方向观察的情况下,突出部318朝向油封500呈环状突出而形成。
61.在轴280的端部280a的前端部,形成有沿着中心轴线a形成的固定用螺纹孔282。通过将轴280的端部280a插通至插通孔312,并经由止动环370将螺栓b2插入至轴280的固定用螺纹孔282而使其螺合,从而将波发生器310固定在轴280的前端部。由此,波发生器310与轴280的旋转联动地旋转。
62.波动发生部311具备主体部313以及安装在主体部313的外周的轴承314。上述的插通孔312形成于主体部313。需要说明的是,在从中心轴线a方向观察的情况下,主体部313的外周形成为椭圆形或长圆形。
63.如图3所示,轴承314是具备内圈315、外圈316、以及配置于它们之间的多个滚珠317的滚动轴承。内圈315嵌入主体部313的外周,沿着主体部313的外周面弹性变形为椭圆形或长圆形。与此同时,外圈316也弹性变形为椭圆形或长圆形。
64.另外,内圈315的外周面和外圈316的内周面分别成为沿周向引导多个滚珠317并使其滚动的轨道面。另外,多个滚珠317由省略图示的保持器保持,以保持彼此在周向上的间隔恒定。
65.在此,在将波发生器310固定于轴280上的情况下,波发生器310成为插通至柔性齿轮330的内侧的状态。另外,在包括作为轴280的轴的中心轴线a的截面上,从相对于中心轴线a的方向垂直的方向观察的情况下,波发生器310成为使波发生器310向与凸缘220相反的方向靠近的状态。通过该固定,波发生器310能够围绕中心轴线a旋转。
66.波动发生部311与柔性齿轮330的筒状部331的内周面接触,使筒状部331挠曲(弹性变形)成椭圆形或长圆形,并使筒状部331的外齿与刚性齿轮360(连结部361)的内齿局部啮合。一般地,柔性齿轮330在被波发生器310挠曲至椭圆状的情况下,在长轴的部分,刚性齿轮360与齿啮合,在短轴的部分,齿成为完全分离的状态。由此,柔性齿轮330与刚性齿轮360以能够围绕中心轴线a旋转的方式在内外啮合。
67.在如此构成的驱动装置100中,当来自电机200的驱动力被输入至波发生器310时,
柔性齿轮330和刚性齿轮360在相互的啮合位置沿周向依次移动的同时,因齿数差而围绕中心轴线a相对旋转。
68.在本实施方式中,柔性齿轮330的凸缘部332以及刚性齿轮360的固定部362固定于凸缘220(减速装置支承部222)。因此,通过刚性齿轮360的连结部361与柔性齿轮330啮合,连结部361围绕中心轴线a相对旋转。
69.由此,从作为驱动源的电机200的轴280输入至波发生器310的驱动力的旋转被减速,并从刚性齿轮360(连结部361)输出。并且,在输出侧,能够得到与减速比成比例的转矩。即,能够实现以波发生器310为输入侧、以刚性齿轮360(连结部361)为输出侧的作为减速装置的波动齿轮装置300。
70.图4a至图4d是表示本实施方式的驱动装置100的组装方法的图。参照图4a至图4d,对驱动装置100的组装方法(组装工序)的一例进行说明。但是,在图4a至图4d中,仅图示电机200的主要部分,省略电机200的组装方法的说明。需要说明的是,驱动装置100的组装顺序不限定于下述。另外,接合等方法也不限于一个。
71.如图4a所示,作为前提,电机200是可旋转地组装于外壳210、机壳240(图2)内部的状态。另外,以油封固定部件250固定(接合)于外壳210,油封500组装于油封固定部件250,油封500的唇面501(图3)紧贴于轴280的外周面281作为前提。
72.本实施方式的组装工序由柔性齿轮/刚性齿轮安装工序、润滑脂注入工序、以及波发生器安装工序构成。
73.如图4b所示,在外壳210的凸缘220(减速装置支承部222)上,组装柔性齿轮330和刚性齿轮360。详细而言,使柔性齿轮330的凸缘部332的插通孔333与减速装置支承部222的固定用螺纹孔228对准。然后,在凸缘部332的上部,载置刚性齿轮360,使固定部362的插通孔364与凸缘部332的插通孔333对准。之后,将螺栓b1从上方插通至插通孔364、333,并使其与固定用螺纹孔228螺合。由此,在外壳210的凸缘220(减速装置支承部222)上,组装柔性齿轮330和刚性齿轮360。
74.该工序是柔性齿轮/刚性齿轮安装工序。
75.需要说明的是,在本实施方式的柔性齿轮/刚性齿轮安装工序中,虽然分别安装了柔性齿轮330和刚性齿轮360,但也能够是柔性齿轮330和刚性齿轮360最初被子组装的状态。在该情况下,无需使柔性齿轮330与刚性齿轮360的位置对准,在被子组装后的状态下,使插通孔364、333与减速装置支承部222的固定用螺纹孔228对准之后,使螺栓b1从上方插通至插通孔364、333,并使其与固定用螺纹孔228螺合即可。
76.接下来,如图4c所示,将润滑脂g注入由柔性齿轮330、凸缘220、油封固定部件250、油封500、以及轴280的端部280a包围而构成的槽部600。需要说明的是,油封500固定于油封固定部件250,通过使唇面501沿着轴280的外周面281紧贴,防止润滑脂g经由轴承401进入电机200内部。
77.该工序是向槽部600的润滑脂注入工序。
78.需要说明的是,轴280使油封500的唇面501沿着外周面281紧贴,并在该唇面501滑动而旋转。此时,在考虑了油封500的寿命的情况下,需要在唇面501上夹设润滑脂g而在润滑状态下使用。润滑脂g在存在于唇面501和外周面281的细微的凹凸处,形成薄的液膜的同时循环。但是,由于因轴280的旋转产生的影响而产生的泵效应,向泄漏方向稍微渗出的润
滑脂g被推回,因此能够防止向轴承401侧泄漏。
79.接着,如图4d所示,将波发生器310组装于轴280的端部280a。详细而言,将轴280的端部280a插通至波发生器310的插通孔312。然后,经由止动环370,将螺栓b2从上方螺合于轴280的固定用螺纹孔282。由此,将波发生器310组装于轴280的端部280a。
80.该工序是波发生器安装工序。
81.需要说明的是,向图4c所示的向槽部600的润滑脂注入工序以及图4d所示的波发生器安装工序对应于向内部空间s填充润滑脂g的润滑脂填充工序。
82.通过以上的组装工序,驱动装置100完成。
83.如图2、图3、图4d所示,在驱动装置100完成的状态下,由轴280、固定于轴280的波发生器310、柔性齿轮330、刚性齿轮360、凸缘220、油封固定部件250、以及油封500构成内部空间s。
84.如图4c所示,在本实施方式中,由于在组装中向槽部600注入润滑脂g,因此润滑脂g填充于最后通过将波发生器310固定于轴280而构成的内部空间s中。
85.如图2、图3、图4d所示,在本实施方式中,在用润滑脂g填充内部空间s的驱动装置100的完成状态下,在轴280的中心轴线a方向上,使油封500与波发生器310之间的距离小于其他部件之间的距离。
86.具体而言,如图3所示,将油封500与波发生器310之间的距离设为油封500的波发生器310侧的端面502与波发生器310的突出部318的端面319之间的距离d1。并且,该距离d1小于作为其他部件之间的距离的距离d2、距离d3,该距离d2为波发生器310的波动发生部311与凸缘220的固定用突起部225的端面225a之间的距离、该距离d3为波发生器310的波动发生部311与凸缘220的减速装置支承部222的端面222a之间的距离。
87.如图3所示,在本实施方式的驱动装置100中,在波动齿轮装置300相对于电机200位于纸面的上方向(设为铅直上方)的情况下,在包含轴280的中心轴线a的截面上,从相对于中心轴线a垂直的方向观察的情况下,在填充有润滑脂g的内部空间s中,具备位于比油封500更靠铅直下方(详细而言,比油封500的端面502更靠铅直下方)的区域。
88.具体而言,如图3的斜线所示,在由润滑脂g填充的内部空间s中,由油封500的端面502和固定用突起部225的端面225a形成的区域c1、以及由油封500的端面502和减速装置支承部222的端面222a形成的区域c2成为位于比油封500更靠铅直下方的区域。另外,区域c1、c2在径向上形成于油封500的外周侧。
89.在通过电机200的驱动使波动齿轮装置300驱动(旋转)的情况下,柔性齿轮330的外齿与刚性齿轮360的内齿一边局部啮合并且彼此的啮合位置沿周向依次移动,一边围绕中心轴线a相对旋转。在该情况下,存在由于外齿与内齿啮合而产生金属粉等磨损粉的情况。
90.这样的磨损粉受到波动齿轮装置300的旋转引起的离心力的影响,容易在比油封500更靠外周侧的柔性齿轮330的筒状部331的内周侧循环。另外,由于磨损粉的比重比润滑脂g的比重大,因此容易向铅直下方移动。其结果,在由润滑脂g填充的空间区域s中,磨损粉容易积存在比油封500更靠外周侧且位于铅垂下方的区域的区域c1、区域c2。
91.根据本实施方式,能够得到以下效果。
92.本实施方式的驱动装置100具有电机200、以及由具有第一厚度t1的波发生器310、
柔性齿轮330、具有大于第一厚度t1的厚度t2的刚性齿轮360构成的波动齿轮装置300。另外,还具有兼用作电机200的壳体,并具有用于固定刚性齿轮360的一部分(固定部362)的凸缘220的至少一个外壳210,以及固定于凸缘220的内侧,沿着轴280的外周的油封500。并且,当在包含轴280的中心轴线a的截面上从相对于中心轴线a垂直方向观察的情况下,使波发生器310向与凸缘220相反的方向靠近,从而由轴280、固定于轴280的波发生器310、柔性齿轮330、刚性齿轮360、凸缘220以及油封500构成内部空间s。并且,在用润滑脂g填充内部空间s的基础上,在轴280的中心轴线a方向上,使油封500与波发生器310之间的距离d1小于其他部件之间的距离d2、d3。
93.通过这样构成,根据成为一体的驱动装置100,与分别将电机、波动齿轮装置组装于机械臂10的臂的情况相比,能够将一体构成的驱动装置100直接组装于臂,因此能够提高组装性。另外,在分别组装的情况下,需要在组装的中途进行润滑脂g的注入,但由于是一体构成,因此组装时不需要进行润滑脂g的注入,能够防止组装时的润滑脂g的泄漏。
94.另外,驱动装置100将电机200和波动齿轮装置300一体地构成,并使刚性齿轮360的厚度t2大于具有第一厚度t1的波发生器310。另外,使波发生器310向与凸缘220相反的方向靠近,并且使油封500与波发生器310之间的距离d1小于内部空间s的其他部位的距离d2、d3。由此,能够抑制填充在内部空间s的润滑脂g在油封500与波发生器310之间流动,因此能够防止润滑脂g经由油封500侵入电机200内部。
95.另外,在驱动装置100中,通过使油封500与波发生器310之间的距离d1小于内部空间s的其他部位的距离d2、d3,使油封500成为接近波发生器310而设置的构成,因此能够实现小型的驱动装置100。
96.在本实施方式的驱动装置100中,兼用作电机200的壳体,并具有用于固定刚性齿轮360的一部分(固定部362)的凸缘220的至少一个夹设部件(外壳210)除了用于从外周侧固定油封500的部件(油封固定部件250)之外,由铝一体成型构成。
97.根据该结构,由于外壳210一体地构成,因此与由多个部件构成的情况相比,组装变得容易。另外,能够防止润滑脂g侵入电机200。
98.在本实施方式的驱动装置100中,在波动齿轮装置300相对于电机200位于铅直上方的情况下,在包含轴280的轴线(中心轴线a)的截面上,从相对于中心轴线a方向的垂直方向观察的情况下,在填充有润滑脂g的内部空间s中,具备位于比油封500更靠铅直下方的区域c1、c2。
99.根据该结构,在由于波动齿轮装置300的齿轮的啮合等而产生磨损粉的情况下,磨损粉能够积存在比油封500更靠铅直下方的区域c1、c2,因此能够防止混合有磨损粉的润滑脂g卡在油封500(唇面501)与轴280(外周面281)之间。因此,能够实现提高可靠性的驱动装置100。
100.根据本实施方式的驱动装置100的组装方法,在组装电机200、波动齿轮装置300、具有凸缘220的壳体210以及油封500的组装工序的中途,具有在由轴280、波动齿轮装置300、凸缘220、油封500构成的内部空间s中填充润滑脂g的工序。并且,在组装工序结束后,在内部空间s中,相对于轴280的中心轴线a方向,油封500与波发生器310之间的距离d1小于其他部件之间的距离d2、d3。
101.根据该组装方法,驱动装置100将电机200和波动齿轮装置300一体地构成,使油封
500与波发生器310之间的距离d1小于其他部件之间的距离d2、d3。由此,能够抑制填充在内部空间s的润滑脂g在油封500与波发生器310之间流动,因此,能够防止润滑脂g经由油封500侵入电机200内部。
102.另外,与分别将电机、波动齿轮装置组装于机械臂10的臂的情况相比,能够将一体构成的驱动装置100直接组装于臂,因此能够提高组装性。另外,在分别组装的情况下,需要在组装的中途进行润滑脂g的注入,但由于是一体构成,因此组装时不需要进行润滑脂g的注入,能够防止组装时的润滑脂的泄漏。
103.2.变形例1
104.在本实施方式的驱动装置100中,油封固定部件250和外壳210分体构成。但是,并不限于此,也能够将油封固定部件250和外壳210—体地成型。
105.3.变形例2
106.在本实施方式的驱动装置100中,内部空间s填充有润滑脂g,但并不限于此,也能够在内部空间s填充50%以上的润滑脂g。
107.4.变形例3
108.虽然说明了本实施方式的驱动装置100用作垂直多关节机器人的驱动装置,但并不限于此,本实施方式的驱动装置100也能够用作水平多关节机器人的驱动装置。
109.5.变形例4
110.在本实施方式的驱动装置100中,一个外壳210兼用作电机200的壳体,并固定刚性齿轮360的一部分。但是,并不限定于此,也能够通过分体设置的外壳兼用作电机200的壳体,并固定刚性齿轮360的一部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1