一种基于三轴机械手的自动锁螺丝装置的制作方法
1.本实用新型涉及自动化设备技术领域,尤其是涉及一种基于三轴机械手的自动锁螺丝装置。
背景技术:
2.在一些产品,如汽车零部件、电脑、显示屏、灯具、手机、制氧机等,的生产中,螺丝锁付是一个必不可少的工序。随着智能制造技术的不断发展,机械手已成为现代制造生产中一个重要组成部分,它可以代替人类手臂完成搬运、抓取、移位等一系列动作。三轴机械手作为空间运动机构,可以在高温、高压、潮湿、粉尘、污染性等恶劣环境实现多重运作,完成人类无法完成的工作,在工业生产领域得到广泛的应用。
3.随着机械手技术的不断发展,基于机械手的自动锁螺丝设备应运而生。自动锁螺丝设备可以取代传统手工拧紧螺丝的机器,提高工作效率。然而,目前的自动锁螺丝设备中,待组装工件通常通过人工握持,以保持待组装工件的稳定,然而人工握持待组装工件,稳定性差,容易导致锁螺丝过程中,螺丝锁不到位或者造成螺丝、工件损坏等等。同时,一些自动锁螺丝设备中,无相应的定位机构,导致待组装工件放置位置不准确,最终螺丝锁紧过程中出现问题。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺陷,提供一种基于三轴机械手的自动锁螺丝装置,在锁螺丝过程中保持工件稳定,避免造成工件损坏。
5.为实现上述目的,本实用新型提出如下技术方案:一种基于三轴机械手的自动锁螺丝装置,所述自动锁螺丝装置包括工作台、三轴机械手和电批,所述工作台上设有用于对工件进行定位的定位机构和用于对工件进行固定的夹紧机构,所述夹紧机构包括第一抵压件、第二抵压件和夹紧驱动机构,所述第一抵压件和第二抵压件相对设置,所述第一抵压件与第二抵压件均与所述夹紧驱动机构相连,或者所述第一抵压件固定于工作台上,所述第二抵压件与夹紧驱动机构相连,所述三轴机械手设于所述工作台上,所述电批与所述三轴机械手相连。
6.优选地,所述定位机构包括至少一个设于所述工作台上的限位件。
7.优选地,当第一抵压件与第二抵压件均与夹紧驱动机构相连时,所述夹紧驱动机构包括用于驱动第一抵压件移动的第一动力源和用于驱动第二抵压件移动的第二动力源,所述第一动力源与所述第一抵压件相连,所述第二动力源与所述第二抵压件相连。
8.优选地,当第一抵压件固定于工作台上,第二抵压件与夹紧驱动机构相连时,所述夹紧驱动机构包括驱动第二抵压件移动的第三动力源,所述第三动力源与第二抵压件相连。
9.优选地,所述第一抵压件和第二抵压件与工件相接触的端面上设有柔性接触件。
10.优选地,所述三轴机械手包括x轴直线移动机构、y轴直线移动机构和z轴直线移动
机构,所述x轴直线移动机构包括沿x轴方向延伸设置的第一支撑件、滑动设于所述第一支撑件上的第一基座和x轴驱动机构,所述x轴驱动机构与第一基座相连;所述y轴直线移动机构设于第一基座上,所述y轴直线移动机构包括沿y轴方向延伸设置的第二支撑件、滑动设于所述第二支撑件上的第二基座和y轴驱动机构,所述y轴驱动机构与第二基座相连;z轴直线移动机构设于第二基座上,所述z轴直线移动机构包括沿z轴方向延伸设置的第三支撑件、滑动设于第三支撑件上的第三基座和z轴驱动机构,所述z轴驱动机构与第三基座相连,所述电批设于第三基座上。
11.优选地,所述x轴驱动机构包括第一丝杆、第一螺母和驱动第一丝杆转动的第四动力源,所述第四动力源与第一丝杆相连,所述第一基座与第一螺母相连。
12.优选地,所述y轴驱动机构包括第二丝杆、第二螺母和驱动第二丝杆转动的第五动力源,所述第五动力源与第二丝杆相连,所述第二基座与第二螺母相连。
13.优选地,所述z轴驱动机构包括第三丝杆、第三螺母和驱动第三丝杆转动的第六动力源,所述第六动力源与第三丝杆相连,所述第三基座与第三螺母相连。
14.优选地,所述自动锁螺丝装置还包括用于检测电批在x轴方向移动位置的第一移位移传感器、检测电批在y轴方向移动位置的第二位移传感器和检测电批在z轴方向移动位置的第三位移传感器。
15.本实用新型的有益效果是:
16.本实用新型所述的基于三轴机械手的自动锁螺丝装置,通过设置定位机构,以对工件进行定位处理,同时通过设置夹紧机构,以对工件进行夹紧处理,提高工件的稳定性及装配精度,避免螺丝锁紧过程中造成工件的损坏。
附图说明
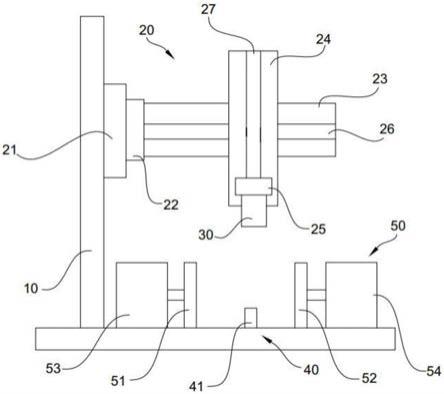
17.图1是本实用新型的结构示意图。
18.附图标记:10、工作台,20、三轴机械手,21、第一支撑件,22、第一基座,23、第二支撑件,24、第三支撑件,25、第三基座,26、第二丝杆,27、第三丝杆,30、电批,40、定位机构,41、限位件,50、夹紧机构,51、第一抵压件,52、第二抵压件,53、第一动力源,54、第二动力源。
具体实施方式
19.下面将结合本实用新型的附图,对本实用新型实施例的技术方案进行清楚、完整的描述。
20.如图1所示,为本实用新型所揭示的一种基于三轴机械手的自动锁螺丝装置,包括工作台10、三轴机械手20和电批30,其中,工作台10上设有定位机构40和夹紧机构50,定位机构40用于对工件进行定位处理,使工件处于正确的位置,夹紧机构50用于对工件进行固定,使工件在螺丝锁紧过程中保持稳定;三轴机械手20设于工作台10上,电批30与三轴机械手20相连,三轴机械手20驱动电批30移动至预设位置处,以将螺丝锁紧在工件上。
21.实施时,将工件放置于工作台10上,并通过定位机构40进行定位处理,进一步通过夹紧机构50将工件进行固定处理。当工件通过夹紧件固定后,三轴机械手20驱动电批30移动至预设位置处,将螺丝锁紧于工件上。
22.如图1所示,定位机构40包括设于工作台10上的至少一限位件41,实施时,工件放置于工作台10上后与限位件41相抵接,以实现工件的定位处理。当然,在其他实施例中,定位机构40也可包括相对设置的第一限位件41、第二限位件41及驱动第一限位件41移动的定位驱动机构,第一限位件41固定于工作台10上,第二限位件41与定位驱动机构相连,定位驱动机构优选气缸。实施时,将工件放置于第一限位件41和第二限位件 41之间,并使工件与第一限位件41相抵接,定位驱动机构进一步驱动第一第二限位件41向工件处移动以使工件与第二限位件41相抵接,在第一限位件41和第二限位件41的作用下,实现工件的定位处理。
23.如图1所示,夹紧机构50包括第一抵压件51、第二抵压件52和夹紧驱动机构,其中,第一抵压件51和第二抵压件52相对设置,第一抵压件 51与第二抵压件52均与夹紧驱动机构相连,或者第一抵压件51固定于工作台10上,第二抵压件52与夹紧驱动机构相连。当第一抵压件51与第二抵压件52均与夹紧驱动机构相连时,工件位于第一抵压件51和第二抵压件52之间,夹紧驱动机构驱动第一抵压件51和第二抵压件52向工件方向移动,第一抵压件51和第二抵压件52在移动到位后,与工件相抵接,实现对工件的夹紧固定。当第一抵压件51固定于工作台10上,第二抵压件 52与夹紧驱动机构相连时,工件位于第一抵压件51和第二抵压件52之间,夹紧驱动机构驱动第二抵压件52向工件方向移动,第二抵压件52在移动到位后与工件相抵接,在第一抵压件51和第二抵压件52相互作用下,实现对工件的夹紧固定。
24.进一步地,当第一抵压件51与第二抵压件52均与夹紧驱动机构相连时,夹紧驱动机构包括两个动力源,分别记为第一动力源53和第二动力源 54,第一动力源53与第一抵压件51相连,第一动力源53驱动第一抵压件51移动,第二动力源54与第二抵压件52相连,第二动力源54驱动第二抵压件52移动,在第一动力源53和第二动力源54的作用下,实现第一抵压件51与第二抵压件52之间距离的改变,最终实现工件的夹紧固定。当第一抵压件51固定于工作台10上,第二抵压件52与夹紧驱动机构相连时,夹紧驱动机构包括第三动力源,第三动力源与第二抵压件52相连,第三动力源驱动第二抵压件52移动,以实现第一抵压件51与第二抵压件52之间距离的改变,最终实现工件的夹紧固定。
25.本实施例中,第一动力源53、第二动力源54和第三动力源均优选气缸。
26.进一步地,为避免在夹紧工件过程中第一抵压件51和第二抵压件52 对工件造成损伤,第一抵压件51和第二抵压件52与工件相接触的端面上设有柔性接触件,柔性接触件优选采用橡胶材质制成的柔性接触件。
27.如图1所示,三轴机械手20包括x轴直线移动机构、y轴直线移动机构和z轴直线移动机构,其中,x轴直线移动机构包括沿x轴方向延伸设置的第一支撑件21、滑动设于所述第一支撑件21上的第一基座22和驱动所述第一基座22沿x轴方向移动的x轴驱动机构(图未示出),x轴驱动机构与第一基座22相连;y轴直线移动机构设于第一基座22上,并且y 轴直线移动机构包括沿y轴方向延伸设置的第二支撑件23、滑动设于所述第二支撑件上的第二基座(图未示出)和驱动所述第二基座沿y轴方向移动的y轴驱动机构,y轴驱动机构与第二基座相连;z轴直线移动机构设于第二基座上,并且z轴直线移动机构包括沿z轴方向延伸设置的第三支撑件24、滑动设于第三支撑件24上的第三基座25和驱动第三基座25沿z 轴方向移动的z轴驱动机构,z轴驱动机构与第三基座25相连,电批30 设于第三基座25上。
28.进一步地,x轴驱动机构包括第一丝杆、第一螺母和驱动第一丝杆转动的第四动力源,第四动力源与第一丝杆相连,第一基座22与第一螺母相连。实施时,第四动力源驱动第
一丝杆转动,第一丝杆带动第一螺母移动,第一螺母进一步带动第一基座22移动;y轴驱动机构包括第二丝杆26、第二螺母(图未示)和驱动第二丝杆26转动的第五动力源(图未示),第五动力源与第二丝杆26相连,第二基座与第二螺母相连,实施时,第五动力源驱动第二丝杆26转动,第二丝杆26带动第二螺母移动,第二螺母进一步带动第二基座移动;z轴驱动机构包括第三丝杆27、第三螺母和驱动第三丝杆27转动的第六动力源,第六动力源与第三丝杆27相连,第三基座 25与第三螺母相连。实施时,第六动力源驱动第三丝杆27转动,第三丝杆27带动第三螺母移动,第三螺母进一步带动第三基座25移动。
29.当然,在其他实施例中,也可采用齿轮传动组件来实现第一基座22或第二基座或第三基座25的移动,齿轮传动组件包括主动轮、从动轮、环绕于主动轮和从动轮上传动带及动力源,动力源与主动轮相连,第一基座22 或第二基座或第三基座25与传动带相连。(动力源优选步进电机)
30.如图1所示,自动锁螺丝装置还包括用于检测电批30在x轴方向移动位置的第一位移传感器(图未示出)、用于检测电批30在y轴方向移动位置的第二位移传感器(图未示出)和用于检测电批30在z轴方向移动位置的第三位移传感器(图未示出),第一位移传感器、第二位移传感器和第三位移传感器将检测到的信息传输至控制系统中,控制系统进一步控制x轴驱动机构、y轴驱动机构和z轴驱动机构驱动相应的基座移动,以使电批 30移动至预设位置。
31.本实用新型所述的基于三轴机械手20的自动锁螺丝装置,通过设置定位机构40,以对工件进行定位处理,同时通过设置夹紧机构50,以对工件进行夹紧处理,提高工件的稳定性及装配精度,避免螺丝锁紧过程中造成工件的损坏。
32.本实用新型的技术内容及技术特征已揭示如上,然而熟悉本领域的技术人员仍可能基于本实用新型的教示及揭示而作种种不背离本实用新型精神的替换及修饰,因此,本实用新型保护范围应不限于实施例所揭示的内容,而应包括各种不背离本实用新型的替换及修饰,并为本专利申请权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1