一种灯具自动组装机用组装装置的制作方法
1.本技术涉及灯具加工技术领域,更具体地说,它涉及一种灯具自动组装机用组装装置。
背景技术:
2.灯,照明用品,泛指可以照亮的用具。人类远古时代用火把照明,后来有了蜡烛和油灯。在古时“烛”是一种由易燃材料制成的火把,用于执持的已被点燃的火把,称之为烛;放在地上的用来点燃的成堆细草和树枝叫做燎,燎置于门外的称大烛,门内的则称庭燎。
3.随着科技时代的不断进步,灯已经成为我们生活中必不可分的必须品之一,现有的灯具中,如白炽灯、卤钨灯以及荧光灯等,该灯具均采用人工操作进行组装,且人工组装的生产方式,工序环节较多,生产效率低,产品的一致性难以控制。这样使得在灯具生产时,难以实现全线的自动化生产。
技术实现要素:
4.针对上述现有技术的不足,本技术的目的是提供一种自动组装机用组装装置,具有实现灯具全自动化生产,替代人工作业,大大提高生产效率的优点。
5.本技术的上述技术目的是通过以下技术方案得以实现的:一种灯具自动组装机用组装装置,包括机架和设于机架上的工作台,所述工作台上设置有完成灯泡和灯头组装的第一组装装置和用于完成灯头端部封装的第二组装装置,所述第一组装装置和所述第二组装装置之间连通有上料装置,所述上料装置设于所述工作台上,所述上料装置用于间歇式输送灯具。
6.优选的,所述上料装置包括转动连接于工作台上输送件、均匀分布于所述输送件上的料盘以及驱动所述输送件移动的第一驱动件。
7.优选的,所述第一组装装置包括设于机架一侧的振动盘以及与振动盘连接的第一机械手,所述第一机械手用于将灯头由振动盘转移至所述上料装置上,且活动往返于所述振动盘和所述上料装置之间。
8.优选的,所述第一机械手包括夹取灯头的第一夹爪、驱动所述第一夹爪靠近或者远离所述上料装置的第二驱动件。
9.优选的,所述第二组装装置包括设于机架上的螺旋输送机以及位于所述螺旋输送机上方的第二机械手,所述第二机械手用于将灯头由螺旋输送机转移至所述上料装置上,且活动往返于所述螺旋输送机和所述上料装置之间。
10.优选的,所述第二机械手包括吸取端盖的吸爪、与所述吸爪连通的负压产生装置以及驱动所述吸爪靠近或者远离所述上料装置的第五驱动件。
11.优选的,所述机架上设置有多个定位夹爪,所述定位夹爪略高于所述上料装置。
12.综上所述,本技术具有的有益效果:首先将配备好灯芯的灯泡依次放置在上料装置上,并通过上料装置将该灯泡依次输送至第一组装装置、第二组装装置,由第一组装装置
完成灯泡和灯头的组装,安装好灯头的灯泡由上料装置移动至第二组装装置,经第二组装装置完成灯头端部的封装,以此实现灯具的全自动化生产,替代人工作业,大大提高生产效率。
附图说明
13.图1是本技术实施例的立体右侧方向的结构示意图;
14.图2是本技术实施例的立体左侧方向的结构示意图;
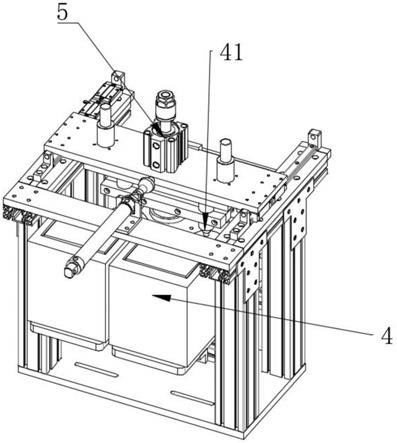
15.图3是本技术实施例的第二组装装置的局部示意图。
16.附图标记:1、机架;11、工作台;12、输送件;13、料盘;14、上料装置;2、振动盘;21、第二夹爪;22、第二驱动件;23、第三驱动件;24、第四驱动件;25、第一组装装置;3、裁刀;31、第九驱动件;32、裁切机构; 4、螺旋输送机;41、吸爪;42、第五驱动件;43、第二组装装置;5、功率检测仪;51、第六驱动件;52、第三夹爪;53、第七驱动件;54、检测装置;6、打点机;61、第八驱动件;7、定位夹爪;8、抵接板;9、下料机构;91、第四夹爪;92、第十驱动件;10、安装板。
具体实施方式
17.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
18.需说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接在另一个部件上或者间接在该另一个部件上。当一个部件被称为是“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。
19.需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
20.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
21.一种灯具自动组装机,参见图1和图2,包括机架和设于机架上的工作台,所述工作台上设置有上料装置、第一组装装置、第二组装装置以及检测装置,所述上料装置用于间歇式输送灯具,所述第一组装装置用于完成灯泡和灯头的组装,所述第二组装装置用于完成灯头端部的封装,所述检测装置用于检测灯具的实际功率,所述第一组装装置、第二组装装置以及检测装置沿所述上料装置移动方向依次设置,所述第一组装装置、第二组装装置以及检测装置分别位于所述上料装置的上方。
22.本实施例中首先将配备好灯芯的灯泡依次放置在上料装置上,并通过上料装置将该灯泡依次输送至第一组装装置、第二组装装置以及检测装置上,由第一组装装置完成灯泡和灯头的组装,安装好灯头的灯泡由上料装置移动至第二组装装置,经第二组装装置完成灯头端部的封装,最后通过检测装置检测组装灯具的实际功率,并将功率合格和不合格
的灯具区分开来,以此实现灯具的全自动化生产,替代人工作业,大大提高生产效率。
23.具体的,所述上料装置包括转动连接于工作台上输送件、均匀分布于所述输送件上的料盘以及驱动所述输送件移动的第一驱动件。
24.配置好灯芯的灯泡放置在料盘中,由第一驱动件驱动输送件将该料盘依次进行输送至第一组装装置、第二组装装置以及检测装置中,以此完成灯具的组装,其中第一驱动件为电机,输送件采用转盘,当然也可以利用输送带进行传输,所述料盘上设置有多个放置工位,提高生产效率。
25.具体的,所述第一组装装置包括设于机架一侧的振动盘以及与振动盘连接的第一机械手,所述第一机械手用于将灯头由振动盘转移至所述上料装置上,且活动往返于所述振动盘和所述上料装置之间。
26.将灯头倾倒进所述振动盘中,由振动盘将灯头有序的输送至所述振动盘末端,再由第一机械手将所述灯头进行抓取,将灯头运输至料盘上,完成灯泡和灯头的初步组装。
27.具体的,所述第一机械手包括夹取灯头的第一夹爪、驱动所述第一夹爪靠近或者远离所述上料装置的第二驱动件。
28.第一夹爪由气缸动力实现夹合,且所述第二驱动件驱动所述第一夹爪将灯头运输至灯泡上,设置结构简单。
29.具体的,所述第一组装装置还包括设于夹取灯头的第二夹爪、驱动所述第二夹爪转动的第三驱动件以及驱动所述第二夹爪靠近或者远离所述上料装置的第四驱动件,所述第三驱动件与所述第二夹爪之间通过同步带传动。
30.在将灯头放置在灯泡上后,第二夹爪通过第四驱动件的驱动,实现与灯头的靠近,并通过气缸将灯头进行夹合,同时驱动第三驱动件,使得第三驱动件通过同步带带动所述第二夹爪的转动,以此实现灯头和灯泡的螺纹锁合。
31.具体的,所述工作台上设置有裁切机构,所述裁切机构用于剪切多余的灯芯。
32.安装好灯头的灯泡,此时由于灯芯过长,为此需将多余的灯芯进行裁切,便于后续将铆钉安装于灯头的端部,为此通过设置裁切机构,利用裁切机构将剪切掉多余的灯芯。
33.具体的,所述裁切机构包括滑动连接于工作台上的裁刀以及驱动所述裁刀靠近或者远离所述上料装置第九驱动件,所述第九驱动件安装于所述工作台上。
34.通过第九驱动件驱动,驱动裁刀向灯芯靠近,以此将灯芯多余的连接段裁断。
35.具体的,所述裁刀呈“v”字形设置。将裁刀呈“v”字形可以尽可能的增大与灯芯多余连接段的接触面积,方便裁切。
36.具体的,所述第二组装装置包括设于机架上的螺旋输送机以及位于所述螺纹输送机上方的第二机械手,所述第二机械手用于将铆钉由螺旋输送机转移至所述上料装置上,且活动往返于所述螺旋输送机和所述上料装置之间。
37.将铆钉倾倒进所述螺旋输送机中,由螺旋输送机将铆钉有序的输送至所述螺旋输送机末端,再由第二机械手将所述铆钉进行抓取,并将铆钉运输至料盘上,完成灯头端部的封盖。
38.具体的,所述第二机械手包括吸取端盖的吸爪、与所述吸爪连通的负压产生装置以及驱动所述吸爪靠近或者远离所述上料装置的第五驱动件。
39.由于铆钉本身体积就小,很难通过夹爪进行抓取,为此通过负压产生装置驱动吸
爪,利用吸爪对铆钉进行吸取,并通过第五驱动件将吸爪靠近或者远离所述料盘,实现对铆钉的安装。
40.具体的,所述工作台上滑动连接有抵接板,所述抵接板与所述第五驱动件连接设置。
41.当灯芯裁断后,仍旧有多余的灯芯露出灯头以外,在将铆钉安装于灯头端部时,为避免在安装灯头,造成灯芯挤压进灯泡的情况,需提前将裸露的灯芯进行弯折,为此在吸爪吸取铆钉进行转移时,第五驱动件带动抵接板滑动,对灯芯进行抵接,并将该多余的灯芯进行弯折,便于后续铆钉的安装。
42.具体的,所述检测装置包括功率检测仪、驱动所述功率检测仪靠近或者远离所述上料装置的第六驱动件以及能够夹取灯具的第三夹爪,所述第三夹爪滑动连接于所述机架上,所述机架上设置有驱动所述第三夹爪靠近或者远离所述上料装置的第七驱动件。
43.完成铆钉安装后的灯具,将由转盘输送至检测装置,第六驱动件驱动功率检测仪向料盘上的灯具靠近并与灯具上的铆钉抵接,将铆钉按压进灯头内,同时通过功率检测仪检测灯具的功率是否达标。
44.若功率检测仪检测灯具的功率不合格,将由第三夹爪夹取,经第七驱动件将该不合格灯具移出料盘,并将该不合格灯具进行回收。
45.具体的,所述功率检测仪上设置有安装板,所述安装板与所述第六驱动件连接。
46.铆钉经由吸爪抓取,并经过第五驱动件将吸取的铆钉放置在灯头端部,为固定铆钉和灯头之间的连接,在功率检测仪监测前,先利用第六驱动件带动所述安装板抵接铆钉,并通过安装板对铆钉进行挤压,加固铆钉和灯头之间的连接。
47.具体的,所述工作台滑动连接有打点机和驱动所述打点机靠近或者远离所述上料装置的第八驱动件,所述第八驱动件安装于所述机架上。
48.经功率检测仪检测功率合格的灯具,将由转盘转移至打点机的下方,通过第八驱动件带动打点机向转盘靠近,并通过打点机在灯头周向环绕打点,以此加固灯头和灯泡之间的连接。
49.具体的,所述机架上设置有多个定位夹爪,所述定位夹爪略高于所述上料装置。
50.由于灯具在组装时且在转盘的运输下,伴随机架的振动,导致灯具在料盘内会发生偏移,进而影响到组装的精确性,为此通过在所述机架上设置有多个定位夹爪,在每一步组装前,先通过定位夹爪对灯具在料盘中的位置进行校准,再进行作业,以此减低灯具组装的不良率。
51.具体的,所述机架上设置有挤压板,所述挤压板位于所述所述定位夹爪的上方,所述机架上设置有驱动所述挤压板靠近或者远离所述定位夹爪的第十一驱动件。
52.定位夹爪对灯具在料盘中的位置进行校准,再进行作业,以此减低灯具组装的不良率,为此通过第十一驱动件驱动挤压板对在进行加工的灯具进行挤压,辅助定位夹爪的校准。
53.具体的,所述工作台上设置有下料机构,所述下料机构用于将灯具移出所述上料装置。
54.检测合格好的灯具,经由转盘移动至所述下料机构,通过下料机构将该组装好的灯具从料盘内取出,以此将该批次灯具整理好。
55.具体的,所述下料机构包括滑动连接于工作台上的第四夹爪以及驱动所述第三夹爪靠近或者远离所述上料装置的第十驱动件。
56.组装好的灯具将由转盘移动至下料机构中,由第十驱动件驱动所述第四夹爪靠近料盘,第四夹爪由气缸动力实现夹合,第四夹爪将该灯具夹取之后经由第十驱动件带离料盘,以此将组装好的灯具进行归集。
57.具体的,所述工作台上设置有传感器,所述传感器位于所述上料装置的上方。利用传感器可便于检测料盘内是否放置有灯泡,当料盘内传感器放置有灯泡后,可通过电路板将上料装置与传感器连通,实现自动化生产的目的。
58.上述实施例仅仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1