一种台阶式供料机构
1.本实用新型涉及加工工程自动化领域,特别涉及一种台阶式供料机构。
背景技术:
2.在棒料加工过程中,常需要对棒料进行搬运,随着机械制造技术的不断发展和进步,已经逐步实现棒料加工自动化,通过机械手将棒料进行抓取放入加工设备中,而通过人工放置显然大大影响上料速度,并且每次摆放位置并不确定,会对后续加工造成较大影响。
技术实现要素:
3.针对以上现有技术存在的缺陷,本实用新型的主要目的在于克服现有技术的不足之处,公开了一种台阶式供料机构,包括工作台,所述工作台的一侧设置侧支撑板,所述侧支撑板的两侧分别安装上料机构和定位机构,所述工作台上设置与所述上料机构连接的送料机构,利用所述送料机构存储并引导工件向所述上料机构移动,所述上料机构将所述工件逐个向上抬举并送入所述定位机构,所述定位机构调节所述工件至指定位置;
4.所述上料机构包括固定座、滑动座和升降机构,所述滑动座为阶梯结构,所述滑动座竖直滑动设置在所述侧支撑板上,所述固定座分设在所述滑动座的两侧,且固定在所述工作台上,所述固定座呈阶梯结构,所述升降机构设置在所述工作台下方,且与所述滑动座连接,驱动所述滑动座竖直往复移动。
5.进一步地,所述滑动座和所述固定座的台阶面向内倾斜。
6.进一步地,所述定位机构包括安装板、基准板、支撑板、推头和驱动器,所述安装板水平固定在所述侧支撑板上,所述基准板和所述支撑板水平可调节的设置在所述安装板上,所述支撑板的上表面凹设v形槽,所述驱动器设置在所述安装板远离所述基准板的一侧,所述推头安装在所述驱动器上,利用所述驱动器驱动所述推头水平移动。
7.进一步地,所述安装板上间隔平行设置至少两条调节孔,所述基准板和所述支撑板通过螺丝固定在所述调节孔内。
8.进一步地,所述支撑板至少间隔平行设置两块。
9.进一步地,所述送料机构包括第一侧板、第二侧板、调节板、载物板,所述工作台上依次平行设置所述第一侧板、所述调节板、所述载物板和所述第二侧板,所述载物板至少平行设置两块,且上表面向所述上料机构倾斜,所述第一侧板安装于所述工作台上,所述调节板通过调节机构与所述第一侧板连接,利用所述调节机构调节所述调节板与所述第一侧板之间的间距;所述第二侧板通过所述调节机构与所述工作台连接,利用所述调节机构调节所述第二侧板的水平位置。
10.进一步地,所述送料机构还包括门板和锁定机构,所述门板通过铰链上下开合设置在所述第二侧板上,利用所述锁定机构使所述门板处于关闭状态。
11.进一步地,所述锁定机构包括安装座和连杆,所述调节板和所述门板的侧边凹设固定凹口,所述安装座固定在所述第一侧板上,所述连杆通过转轴水平转动设置在所述安
装座上,锁定时,所述连杆置于所述调节板和所述门板的所述固定凹口内。
12.进一步地,所述升降机构为直筒式凸轮机。
13.本实用新型取得的有益效果:
14.本实用新型通过送料机构、上料机构和定位机构的相互配合,实现了多尺寸工件逐个精准上料;同时上料机构采用阶梯结构,对工件分布抬升,即每一次动作仅实现工件一台阶高度的抬升,减少了升降机构的行程,进而提高运行速度;同时升降机构采用凸轮机,弥补了常规气缸的动力不足,有这更强的顶升力。送料机构通过调节机构实现调节板与第二侧板的间距调节,以配合不同长度的工件,提高了设备的适配性;同时在第二侧板上增设门板,以降低第二侧板的高度,在调节时,将门板打开,以方便工作人员及时观察工件在通道内的状态。
附图说明
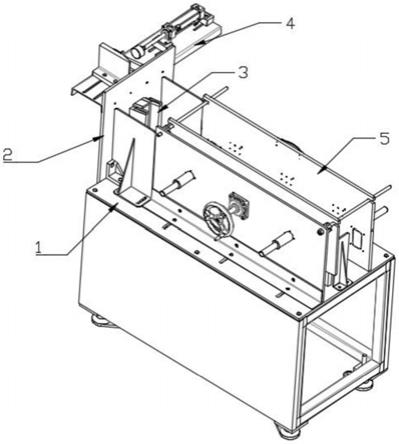
15.图1为本实用新型的一种台阶式工料机构的立体结构示意图;
16.图2为上料机构的安装示意图;
17.图3为固定座与滑动座的配合示意图;
18.图4为定位机构的结构示意图;
19.图5为送料机构的立体结构示意图;
20.图6图5的俯视图;
21.图7为载物板的结构示意图;
22.附图标记如下:
23.1、工作台,2、侧支撑板,3、上料机构,4、定位机构,5、送料机构,31、固定座,32、滑动座,33、升降机构,331、伺服电机,332、凸轮,333、滚轮,41、安装板,42、基准板,43、支撑板,44、推头,45、驱动器,46、传感器,51、第一侧板,52、第二侧板,53、调节板,54、载物板,55、调节机构,56、门板,57、锁定机构,331、伺服电机,332、凸轮,333、滚轮,551、导套,552、导杆,553、螺杆,554、螺套,555、手轮,571、安装座,572、连杆。
具体实施方式
24.为了使本实用新型的目的、技术方案及优点更加清楚明白,下面结合附图及实施例对本实用新型作进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
25.一种台阶式供料机构,如图1所示,包括工作台1,工作台1的一侧设置侧支撑板2,侧支撑板2的两侧分别安装上料机构3和定位机构4,工作台1上设置与上料机构3连接的送料机构5,利用送料机构5存储并引导工件(棒料)向上料机构3移动,上料机构3将工件逐个向上抬举并送入定位机构4,定位机构4调节工件至指定位置,以保证每次棒料位置均相同,等待机械手抓取。
26.如图1
‑
3所示,上料机构3包括固定座31、滑动座32和升降机构33,如图2
‑
3所示,滑动座32为阶梯结构,其上面具有三个台阶面,滑动座32通过直线导轨竖直滑动设置在支撑板2上;固定座31分设在滑动座32两侧,并且固定安装于工作台1上,固定座31呈阶梯结构,也同样设置两个台阶面。升降机构33安装于工作台1下方,与滑动座32连接,通过升降机构
33驱动滑动座32竖直往复移动。优选的,滑动座32和固定座31的台阶面向内倾斜。使用时,升降机构33驱动滑动座32下移,一工件滑动至滑动座32的下台阶面,通过升降机构33驱动滑动座32上移将工件抬起,工件顺着滑动座32的下台阶面滑至固定座31的下台阶面,而后驱动机构重复上述动作,利用滑动座32的中台阶面将固定座31的下台界面上的工件移动至固定座31的上台阶面;最后升降机构33再次重复上述动作,利用滑动座32的上台阶面将固定座31的上台阶面上的工件抬举至工件能够滑入定位机构4内。进而完成一工件的提升,每一步操作各台阶面上工件均上升一台阶高度,升降机构3所需形成端,且工件传送效率高。
27.在上述实施例中,升降机构33为直筒式凸轮机。如图2所示,升降机构33包括伺服电机331、齿轮箱、凸轮332和滚轮333,滚轮333安装于滑动座32的底部,凸轮332通过齿轮箱与伺服电机331连接,滚轮333置于凸轮332上,利用伺服电机331驱动齿轮箱以带动凸轮332转动,以驱动滑动座32竖直移动。
28.在一实施例中,如图1、4所示,定位机构4包括安装板41、基准板42、支撑板43、推头44和驱动器45,安装板41水平固定在侧支撑板2上,基准板42和支撑板43水平可调节的设置在安装板41上,工件放置在支撑板43上,并且通过基准板42确定工件的一端的位置。支撑板43的上表面设置v形槽;可知,v形槽有两斜面相交形成,工件从支撑板43的一侧的斜面划入v形槽的底部,并通过v形槽实现对工件一方向上的定位。驱动器45安装在安装板41远离基准板42的一侧,推头44安装在驱动器45上,利用驱动器45驱动推头44水平移动,以推动工件向基准板42方向移动,直至工件的端面贴于基准板42上。其中,驱动器45可以为气缸。
29.在上述实施例中,安装板41上间隔平行设置至少两条调节孔,基准板42和支撑板43通过螺丝与调节孔固定,进而实现基准板42和支撑板43的位置调节。即由于工件的长度不同,调节基准板42的位置,以确定工件的基准位置;调节支撑板43的位置以调节工件的支撑位置。优选的,支撑板43设置两块,两块支撑板43竖直平行设置在安装板41上,根据不同长度的工件,调节两支撑板43之间的距离,使得工件能够稳定的放置在支撑板43上,以保证工件水平放置。当然,支撑板43可以根据实际需求放置更多。
30.在上述实施例中,为了实现定位机构4的自动运行,在两支撑板43之间设置传感器46,用于向plc发送工件到位信号,以控制驱动器45运动。其中,传感器可以为接近开关等。
31.在一实施例中,送料机构5包括第一侧板51、第二侧板52、调节板53、载物板54,工作台1上依次设置第一侧板51、调节板53和第二侧板52,调节板53和第二侧板52之间形成引导工件的通道,第一侧板51固定在工作台1上,调节板53通过调节机构55安装在第一侧板51上,利用调节机构55调节第一侧板51与调节板53之间的距离。第二侧板52通过调节机构55安装在工作台1上,进而调节第二侧板52的水平位置以调节调节板53与第二侧板52之间的距离与工件向配合。载物板54安装在工作台1上,且至少设置两块;在本实施例中,载物板54设置两块,两块载物板54竖直且间隔安装在工作台1上;载物板54上表面设置以斜面,使得工件能够从较高的一端顺着斜面向较低的一端移动。
32.在上述实施例中,如图1及图5
‑
7所示,送料机构5还包括门板56和锁定机构57,门板56通过铰链上下开合设置在第二侧板52上,并通过锁定机构57使门板56处于关闭状态。具体的,在设备调试阶段,需要根据工件的长度不同进而调整调节板53和第二侧板52之间的距离;首先,确定调节板53的位置,而后调节第二侧板52的位置,因此,在调节时需要观察通道内的与工件配合情况,因此,通过设置门板56以降低第二侧板52的高度,进而工作人员
无需再调节时频繁在通道入口和调节机构55之间往返跑。即在调节时,锁定机构57打开,门板56绕铰链翻转至与第二侧板52折叠状态;而在设备运行时,门板56与第二侧板52处于展开状态。
33.其中,只需能够将门板56在展开状态时锁定,均可作为本实施例的锁定结构。一优选的,锁定机构57包括安装座571和连杆573,调节板53和门板56的侧边凹设固定凹口,安装座571固定在第一侧板51上,连杆572通过转轴水平转动设置在安装座571上,锁定时,连杆572置于调节板53和门板56的固定凹口内。通过连杆572连接第一侧板51、第二侧板52和调节板53,使其形成一整体,相互牵制,实现门板56的锁定。
34.上述实施例中,如图5
‑
7所示调节机构55包括导套551、导杆552、螺杆553、螺套554和手轮555。以调节机构55连接调节板53和第一侧板51,螺套554安装在第一侧板51上,导套551分设在螺套554的两侧,螺杆553和导杆552分别设置在螺套554和导套551内,且一端与调节板53连接,手轮555安装于螺杆553的另一端,利用手轮555驱动螺杆553转动,进而驱动调节板53沿导杆552引导方向水平移动。调节机构55连接第二侧板52和工作台1如上述结构,导套551和螺套554安装在工作台1上。
35.本实用新型在使用时,如图1
‑
7所示,操作人员根据工件的长度,调节调节板53与第二侧板52之间的距离,使其与工件长度配合;而后将工件依次存放于载物板54上,使其顺着载物板54的斜面向上料机构3移动,并通过上料机构3逐个将工件抬高以台阶,即在本实施例中能够同时驱动三个工件抬升一台阶。当工件落入定位机构4时,利用定位机构4保证每一工件到达指定位置,方便机械手抓取。
36.以上仅为本实用新型的较佳实施例,并非用来限定本实用新型的实施范围;如果不脱离本实用新型的精神和范围,对本实用新型进行修改或者等同替换,均应涵盖在本实用新型权利要求的保护范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1