一种人防门扇的机器人焊接平台装置的制作方法
1.本实用新型属于焊接设备技术领域,具体是一种人防门扇的机器人焊接平台装置。
背景技术:
2.人防门扇就是人民防护工程出入口的门扇,人防门分类比较鲜明,有普通单、双扇防护密闭门扇和密闭门扇,活门槛单、双扇防护密闭门扇和密闭门扇等多种人防设备,而为了生产人防门扇,就会使用到机器人焊接设备,由于机器人焊接设备自动化,所以就可以节约人力资源和提高生产效率。
3.现有的人防门扇在使用机器人焊接设备进行生产工作的时候,由于焊接过程中产生强光,所以质检人员在现场进行抽样检查的时候,眼睛就会容易被强光刺伤,另外在对细微的焊接点进行检查的时候,质检人员通过肉眼很难发现细微的差错,这样就降低了产品的合格率。
技术实现要素:
4.本实用新型的目的在于克服现有技术的缺陷,提供一种人防门扇的机器人焊接平台装置。
5.为实现上述目的,本实用新型采用了如下技术方案:一种人防门扇的机器人焊接平台装置,包括焊接机器人,所述焊接机器人的焊接组件表面固定安装有可拆式防护罩,所述焊接机器人一侧斜角设有清枪站,所述焊接机器人四周呈三角形的方式安装有三个安全工作台,且焊接机器人和清枪站位于三个安全工作台中间,三个所述安全工作台之间设有围栏门,左后侧所述围栏门左侧分别安装有焊机和机器人控制柜,且焊机位于机器人控制柜后侧。
6.优选的,所述焊接机器人由旋转台、折叠支撑臂和焊接组件组成,折叠支撑臂位于旋转台上端,焊接组件套接在折叠支撑臂上侧,旋转台和折叠支撑臂的接线端均通过电线与机器人控制柜电连接,焊接组件的接线端通过电线与焊机电连接。
7.优选的,所述可拆式防护罩包括凹字形防护罩、遮光片、卡孔式l形支撑柱、观察圆槽、放大镜片、卡柱式连接端和凸字形圆柱,所述凹字形防护罩上端中间开设有观察圆槽,所述观察圆槽中间内壁固定连接有放大镜片,所述凹字形防护罩上端且位于观察圆槽一侧套接有凸字形圆柱,所述凸字形圆柱上端固定连接有遮光片,且遮光片位于观察圆槽上侧,所述凹字形防护罩一端上侧固定连接有卡柱式连接端,所述卡柱式连接端外壁套接有卡孔式l形支撑柱。
8.优选的,所述卡孔式l形支撑柱包括l型连接支撑柱、凹字形开口槽、旋转圆孔和固定卡孔,所述l型连接支撑柱一端开设有凹字形开口槽,所述l型连接支撑柱一侧前后两端开设有旋转圆孔,且两个旋转圆孔位于凹字形开口槽前后两端一侧,所述l型连接支撑柱一侧前后两端开设有多个固定卡孔,且多个固定卡孔呈等间距半圆弧结构分布在旋转圆孔另
一侧,同时多个固定卡孔位于凹字形开口槽前后两端另一侧。
9.优选的,所述卡柱式连接端包括固定插柱、弹簧卡柱和旋转轴,所述固定插柱一侧前后两端面固定连接有旋转轴,且旋转轴与卡孔式l形支撑柱中的旋转圆孔旋转套接,所述固定插柱前后两端另一侧套接有弹簧卡柱,且弹簧卡柱与卡孔式l形支撑柱中的固定卡孔卡接。
10.优选的,所述安全工作台包括安全光栅和固定工作台,所述固定工作台一端固定连接有安全光栅,且安全光栅一侧位于相邻两个围栏门之间。
11.优选的,所述机器人控制柜与焊机电连接,所述机器人控制柜和焊机外壁均涂有绝缘漆层结构。
12.与现有技术相比,本实用新型提供了一种,具备以下有益效果:
13.本实用新型中通过卡柱式连接端中的弹簧卡柱在l型连接支撑柱中的股预定卡孔内部进行伸缩工作,以及旋转轴在l型连接支撑柱中的旋转圆孔内部进行旋转工作,就可以使得卡柱式连接端中的固定插柱在l型连接支撑柱中的凹字形开口槽内部进行旋转工作,从而就可以对卡柱式连接端和凹字形防护罩进行角度调节工作,方便凹字形防护罩进行防护工作,避免焊接产生的强光伤害质检人员的眼睛;
14.本实用新型中通过放大镜片,就可以对焊接过后的细微的焊接点进行放大工作,从而方便质检人员对细微的焊接点进行观察工作和质检工作,这样就提高了产品的合格率;
15.本实用新型中通过凸字形圆柱带动遮光片进行旋转工作,就会使得遮光片完成展开工作和闭合工作,在遮光片进行展开工作的时候,方便质检人员进行观察细微的焊接点,而遮光片进行闭合工作的时候,就可以对强光进行遮挡工作,从而避免伤害质检人员的眼睛。
附图说明
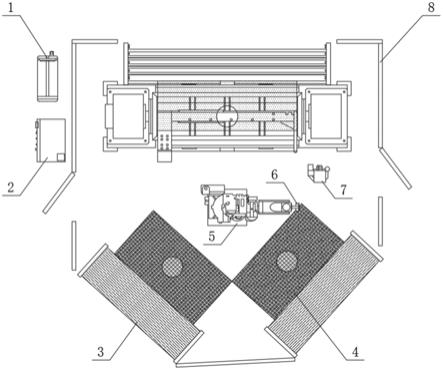
16.图1是本实用新型的一种人防门扇的机器人焊接平台装置俯视结构示意图;
17.图2是本实用新型中焊接机器人及可拆式防护罩结构示意图;
18.图3是本实用新型中可拆式防护罩闭合状态下爆炸结构示意图;
19.图4是本实用新型中可拆式防护罩展开状态下爆炸结构示意图;
20.图5是本实用新型中a部分结构示意图;
21.图6是本实用新型中可拆式防护罩闭合状态下正视解剖结构示意图;
22.图7是本实用新型中可拆式防护罩展开状态下正视解剖结构示意图;
23.图8是本实用新型中b部分结构示意图。
24.附图标记:1、焊机;2、机器人控制柜;3、安全光栅;4、固定工作台;5、焊接机器人;6、可拆式防护罩;61、凹字形防护罩;62、遮光片;63、l型连接支撑柱;631、凹字形开口槽;632、旋转圆孔;633、固定卡孔;64、观察圆槽;65、放大镜片;66、固定插柱;661、弹簧卡柱;662、旋转轴;67、凸字形圆柱;7、清枪站;8、围栏门。
具体实施方式
25.以下结合附图1
‑
8,进一步说明本实用新型一种人防门扇的机器人焊接平台装置
的具体实施方式。本实用新型一种人防门扇的机器人焊接平台装置不限于以下实施例的描述。
26.本实施例给出:一种人防门扇的机器人焊接平台装置,包括焊接机器人5,焊接机器人5的焊接组件表面固定安装有可拆式防护罩6,焊接机器人5一侧斜角设有清枪站7,焊接机器人5四周呈三角形的方式安装有三个安全工作台,且焊接机器人5和清枪站7位于三个安全工作台中间,三个安全工作台之间设有围栏门8,左后侧围栏门8左侧分别安装有焊机1和机器人控制柜2,且焊机1位于机器人控制柜2后侧。
27.通过采用上述技术方案:通过卡柱式连接端中的弹簧卡柱661在l型连接支撑柱63中的股预定卡孔内部进行伸缩工作,以及旋转轴662在l型连接支撑柱63中的旋转圆孔632内部进行旋转工作,就可以使得卡柱式连接端中的固定插柱66在l型连接支撑柱63中的凹字形开口槽631内部进行旋转工作,从而就可以对卡柱式连接端和凹字形防护罩61进行角度调节工作,方便凹字形防护罩61进行防护工作,避免焊接产生的强光伤害质检人员的眼睛。
28.通过采用上述技术方案:通过放大镜片65,就可以对焊接过后的细微的焊接点进行放大工作,从而方便质检人员对细微的焊接点进行观察工作和质检工作,这样就提高了产品的合格率;
29.通过采用上述技术方案:通过凸字形圆柱67带动遮光片62进行旋转工作,就会使得遮光片62完成展开工作和闭合工作,在遮光片62进行展开工作的时候,方便质检人员进行观察细微的焊接点,而遮光片62进行闭合工作的时候,就可以对强光进行遮挡工作,从而避免伤害质检人员的眼睛。
30.为了自动化进行焊接工作,焊接机器人5由旋转台、折叠支撑臂和焊接组件组成,折叠支撑臂位于旋转台上端,焊接组件套接在折叠支撑臂上侧,旋转台和折叠支撑臂的接线端均通过电线与机器人控制柜2电连接,焊接组件的接线端通过电线与焊机1电连接,通过焊接机器人5,可以自动化完成焊接工作,提高工作效率。
31.为了进行防护工作,可拆式防护罩6包括凹字形防护罩61、遮光片62、卡孔式l形支撑柱、观察圆槽64、放大镜片65、卡柱式连接端和凸字形圆柱67,凹字形防护罩61上端中间开设有观察圆槽64,观察圆槽64中间内壁固定连接有放大镜片65,凹字形防护罩61上端且位于观察圆槽64一侧套接有凸字形圆柱67,凸字形圆柱67上端固定连接有遮光片62,且遮光片62位于观察圆槽64上侧,凹字形防护罩61一端上侧固定连接有卡柱式连接端,卡柱式连接端外壁套接有卡孔式l形支撑柱,通过可拆式防护罩6,可以更好地进行保护质检人员的眼睛,同时也为了方便质检人员进行质检工作。
32.为了进行角度调节工作,卡孔式l形支撑柱包括l型连接支撑柱63、凹字形开口槽631、旋转圆孔632和固定卡孔633,l型连接支撑柱63一端开设有凹字形开口槽631,l型连接支撑柱63一侧前后两端开设有旋转圆孔632,且两个旋转圆孔632位于凹字形开口槽631前后两端一侧,l型连接支撑柱63一侧前后两端开设有多个固定卡孔633,且多个固定卡孔633呈等间距半圆弧结构分布在旋转圆孔632另一侧,同时多个固定卡孔633位于凹字形开口槽631前后两端另一侧,通过卡孔式l形支撑柱,可以更好地进行角度调节工作,方便凹字形防护罩61进行防护工作。
33.为了进行支撑工作,卡柱式连接端包括固定插柱66、弹簧卡柱661和旋转轴662,固
定插柱66一侧前后两端面固定连接有旋转轴662,且旋转轴662与卡孔式l形支撑柱中的旋转圆孔632旋转套接,固定插柱66前后两端另一侧套接有弹簧卡柱661,且弹簧卡柱661与卡孔式l形支撑柱中的固定卡孔633卡接,通过卡柱式连接端,可以更好地进行固定支撑工作,同时也为了更好地进行角度调节工作。
34.为了进行安全工作,安全工作台包括安全光栅3和固定工作台4,固定工作台4一端固定连接有安全光栅3,且安全光栅3一侧位于相邻两个围栏门8之间,通过安全工作台,可以更好地进行固定工作和支撑工作,同时也为了提高安全防护工作。
35.为了进行控制工作,机器人控制柜2与焊机1电连接,机器人控制柜2和焊机1外壁均涂有绝缘漆层结构,通过机器人控制柜2与焊机1,可以更好地进行控制工作和焊接工作。
36.工作原理:工作人员先将机器人控制柜2与外部电源进行电连接工作,然后工作人员通过对机器人控制柜2进行操作,来检测焊机1和焊接机器人5是否正常工作,随后工作人员通过对可拆式防护罩6中的卡孔式l形支撑柱和卡柱式连接端进行角度调节工作,就可以对凹字形防护罩61进行角度调节工作,从而使得凹字形防护罩61可以更好地进行防护工作,在完成上述工作之后,整个装置就可以投入使用了;
37.在使用的时候,工作人员先将所有的待加工部件固定在固定工作台4上端,然后工作人员通过对机器人控制柜2进行操作,就可以控制焊接机器人5和焊机1进行工作,当焊接机器人5进行工作的时候,就可以进行横向转动工作和纵向高度调节工作,而焊机1进行工作的时候,就可以为焊接机器人5的焊接组件提供焊接的能源,从而使得焊接机器人5的焊接组件可以更好地对待加工部件进行焊接工作,并且在整个焊接的过程中,通过凹字形防护罩61和遮光片62,就可以遮挡焊接产生的强光;
38.而焊接完成之后,质检人员就可以进行质检工作过,在进行质检工作的时候,质检人员通过对遮光片62进行旋转工作,就可以将遮光片62旋转展开,然后质检人员再通过放大镜片65,就可以放大观察加工部件的细微的焊接点,从而方便质检人员对加工部件的细微的焊接点进行质检工作,这样就可以提高产品的合格率。
39.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1