一种焊接型钢防变形夹具的制作方法
1.本实用新型涉及焊接型钢夹具领域,具体是涉及一种焊接型钢防变形夹具。
背景技术:
2.焊接过程中被焊工件受到不均匀温度场的作用而产生的形状、尺寸变化称为焊接变形。随温度变化而变化的称为焊接瞬时变形;被焊工件完全冷却到初始温度时的改变,称为焊接残余变形。
3.将钢板与其他倾斜面焊接在一起时,焊接点附近的钢板总是朝向焊接点卷曲变形,变形后的钢板无法满足钢材的强度需求,给生产带来了极大的不便。现有的工装夹具往往是固定夹具,只对待焊接物进行固定,不能对钢板起到防变形的保护作用。
技术实现要素:
4.为解决上述技术问题,提供一种焊接型钢防变形夹具。
5.为达到以上目的,本实用新型采用的技术方案为:
6.一种焊接型钢防变形夹具,用于夹紧钢板,包括,
7.主体;
8.推杆,推杆可沿自身轴线方向滑动的安装在主体上;
9.夹板,夹板安装在推杆的一端,夹板抵住目标钢板的不被焊接的一面;
10.所述夹具还包括,
11.机械臂,机械臂至少有两个,机械臂环绕的固定安装在主体上,机械臂上设置有卡爪,卡爪抵住目标钢板待焊接的一面。
12.优选的,
13.推杆外壁上设置有螺纹;
14.主体上开设有与螺纹相对应的螺纹孔,螺纹孔与螺纹的螺纹相配合。
15.优选的,夹板固定安装在推杆的一端。
16.优选的,夹板可围绕推杆轴线转动的安装在推杆的一端,夹板的运动跟随推杆的径向运动。
17.优选的,
18.机械臂还包括,固定臂,固定臂固定安装在主体上;旋转臂,旋转臂铰接在固定臂远离主体的一端,旋转臂远离固定臂的一端为自由端;
19.卡爪固定设置在旋转臂自由端。
20.优选的,旋转臂上设置有扭转弹簧,扭转弹簧的一端固定安装在固定臂上,扭转弹簧的另一端固定安装在旋转臂上;扭转弹簧在原始状态时,旋转臂的自由端倾斜朝向推杆的轴线延伸线。
21.优选的,
22.机械臂还包括旋转臂,旋转臂铰接在主体上,旋转臂远离主体的一端为自由端;
23.卡爪固定设置在旋转臂的自由端上。
24.优选的,旋转臂上设置有扭转弹簧,扭转弹簧的一端固定安装在主体上,扭转弹簧的另一端固定安装在旋转臂上;扭转弹簧在原始状态时,旋转臂的自由端倾斜朝向推杆的轴线延伸线。
25.优选的,推杆未设置夹板的一端固定安装有旋转把手,旋转把手的把手部分为便于人手把持的形状。
26.优选的,主体上固定安装有固定把手,固定把手为便于人手把持的形状。
27.本实用新型与现有技术相比具有的有益效果是:
28.1.本实用新型通过夹板和卡爪的设计,解决了焊接钢板时防止钢板容易变形的技术问题。
29.2.本实用新型通过仅一个螺纹孔与少量铰接的设计,具有设计简单,成本低廉,结构可靠的优点。
30.3.本实用新型结构简单,具有方便携带与转移的优点。
31.4.本实用新型通过仅需要拨动旋转臂夹住待焊接钢板,旋转推杆来推动夹板这两步即可完成夹持操作的设计,具有操作简单的优点。
32.5.本实用新型通过旋转把手与固定把手的设计,具有操作方便,省时省力的优点。
附图说明
33.图1为本实用新型在工作状态下的主视图;
34.图2为本实用新型的主视图;
35.图3为本实用新型的侧视图;
36.图4为本实用新型的后视图;
37.图5为本实用新型的俯视图;
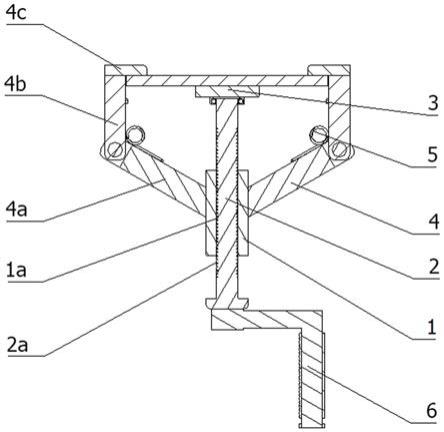
38.图6为图5的a-a截面处剖视图;
39.图7为本实用新型的立体图;
40.图8为本实用新型未夹持钢板时的立体图;
41.图中标号为:
42.1-主体;1a-螺纹孔;
43.2-推杆;2a-螺纹;
44.3-夹板;
45.4-机械臂;4a-固定臂;4b-旋转臂;4c-卡爪;
46.5-扭转弹簧;
47.6-旋转把手;
48.7-固定把手。
具体实施方式
49.以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
50.为了解决焊接钢板时防止钢板变形的技术问题,如图7、8所示,提供以下技术方
案:
51.一种焊接型钢防变形夹具,用于夹紧钢板,包括,
52.主体1;
53.推杆2,推杆2可沿自身轴线方向滑动的安装在主体上;
54.夹板3,夹板3安装在推杆2的一端,夹板3抵住目标钢板的不被焊接的一面;
55.机械臂4,机械臂4至少有两个,机械臂4环绕的固定安装在主体1上,机械臂4上设置有卡爪4c,卡爪4c抵住目标钢板待焊接的一面。
56.具体的,机械臂4至少两个,根据生产需求,可以上下各增设若干个,或者在主体1的上下左右各设置若干个。
57.在对目标钢板进行焊接时,钢板先被固定好后,将所述夹具夹持在目标钢板待焊接点附近:
58.将机械臂4夹持在目标钢板的侧边上,卡爪4c抵住目标钢板的焊接面靠近侧边的部分。推动推杆2,使得推杆2推动夹板3抵住目标钢板的另一侧面的中间部分。再进行焊接,由于卡爪4c抵住了钢板焊接面靠近侧边的部分,同时夹板3抵住了目标钢板的另一侧面的中间部分,使得钢板不能沿着焊接面向内卷曲:两边被卡爪4c抵住无法内卷,中间被夹板3抵住无法凸起,阻止了钢板的焊接变形。
59.进一步的:
60.为了解决如何推拉与固定推杆2的技术问题,如图1、2所示,提供以下技术方案:
61.推杆2外壁上设置有螺纹2a;
62.主体1上开设有与螺纹2a相对应的螺纹孔1a,螺纹孔1a的孔径与推杆2的直径相同。
63.具体的,通过螺纹孔1a和推杆2自身的螺纹2a,转动推杆2a,可以实现推杆2a在主体1中进行前进和后退。而且螺纹本身具有抗拒径向推力的原因,在无外部旋转力的作用下,推杆2相对于主体1 的位置固定。且因为螺纹2a的固定,推杆2受到夹板3的径向力时,推杆2仍会保持一个相对固定的状态,不会被夹板3推动,以此也保证了焊接时夹板3相对钢板固定,不会发生位移。
64.进一步的:
65.为了解决推杆2与夹板3间如何连接的技术问题,如图6、7、8 所示,提供以下技术方案:
66.夹板3固定安装在推杆2的一端。
67.具体的,夹板3固定安装在推杆2的一端,夹板3完全跟随推杆 2的运动而运动。
68.夹板3和推杆2还可以采用以下连接方式:夹板3可围绕推杆2 轴线转动的安装在推杆2的一端,夹板3的运动跟随推杆2的径向运动。
69.具体的,夹板3可通过止推轴承或其他机械结构安装在推杆2的一端。当推杆2旋转时,夹板3可以跟随推杆2转动也可以不跟随推杆2转动,但夹板3都会跟随推杆2做径向运动。当夹板3抵住目标钢板时,因为摩擦力的作用,夹板3相对目标钢板固定,此时夹板3 便不再跟随推杆2转动。
70.以上两种连接方式,固定连接较节约成本,但是因为螺纹2a的原因,推杆2前进时会进行旋转运动,并带动夹板3进行旋转,夹板 3在抵靠住目标钢板时,会在目标钢板表面
转动,可能会对目标钢板表面造成磨损,用止推轴承或其他旋转结构虽然会增加成本,而且降低使用可靠性,但是夹板3在抵住目标钢板后,夹板3因为与钢板间摩擦力的作用,夹板3便不会再跟随推杆2进行旋转,便减少了对目标钢板表面的磨损。所以以上连接方法,旋转结构连接是优选方法。
71.但是在考虑到生产时,部分钢板料对表面的微小磨损无技术及外观要求,而且固定连接更节约成本,结构更加可靠,所以固定连接仍可作为备选方案,并根据实际情况进行生产。
72.进一步的:
73.为了解决机械臂4如何使卡爪4c抵住目标钢板焊接面的技术问题,如图6所示,提供以下技术方案:
74.机械臂4还包括,固定臂4a,固定臂4a固定安装在主体1上;旋转臂4b,旋转臂4b铰接在固定臂4a远离主体1的一端,旋转臂 4b远离固定臂4a的一端为自由端;
75.卡爪4c固定设置在旋转臂4b自由端。
76.具体的,旋转臂4b可以绕着固定臂4a的一端旋转。当对目标钢板进行固定时,分别用相对的旋转臂4b抵住待焊接钢板的两侧边,卡爪4c抵住钢板待焊接面上下靠近边缘的部分。在抵紧夹板3时,夹板3与卡爪4c会相对的夹紧钢板的两侧面,从而夹紧钢板。在与钢板间摩擦力的作用下,卡爪4c也会相对钢板待焊接面固定。
77.机械臂4也可以不带有固定臂4a,如此就为以下结构:
78.机械臂4还包括旋转臂4b,旋转臂4b铰接在主体1上,旋转臂 4b远离主体1的一端为自由端;
79.卡爪4c固定设置在旋转臂4b的自由端上。
80.具体的,旋转臂4b可以绕着与主体1的铰接点旋转。当对目标钢板进行固定时,分别用相对的旋转臂4b抵住待焊接钢板的侧边,卡爪4c抵住钢板待焊接面。在抵紧夹板3时,夹板3与卡爪4c会相对的夹紧钢板的两侧面,从而夹紧钢板。在与钢板间摩擦力的作用下,卡爪4c也会相对钢板待焊接面固定。
81.以上两种机械臂4,机械臂4的总长度不变,铰接点个数不变,原理相同,并不会增加相应的成本。但是若不设置固定臂4a,在对目标钢板进行夹持时,旋转臂4b相对目标钢板的倾斜度增大,容易使旋转臂4b与卡爪4c增大相对目标钢板的夹角,一方面容易增加夹具与钢板的磨损,另一方面会对夹持效果造成影响。所以机械臂4最好带有固定臂4a。
82.进一步的:
83.为了解决旋转臂4b总是自由运动的技术问题,如图2、5、6所示,提供以下技术方案:
84.如果机械臂4带有固定臂4a:
85.机械臂4上设置有扭转弹簧5,扭转弹簧5的一端固定安装在固定臂4a上,扭转弹簧5的另一端固定安装在旋转臂4b上;扭转弹簧 5在原始状态时,旋转臂4b的自由端倾斜朝向推杆2的轴线延伸线。
86.如果机械臂4未带有固定臂4a:
87.机械臂4上设置有扭转弹簧5,扭转弹簧5的一端固定安装在主体1上,扭转弹簧5的另一端固定安装在旋转臂4b上;扭转弹簧5 在原始状态时,旋转臂4b的自由端倾斜朝向推
杆2的轴线延伸线。
88.具体的,如果仅靠卡爪4c与钢板间的摩擦力来固定机械臂4,那么在推杆2旋转推动的过程中,下方的旋转臂4b必须要一直进行托举,耗时耗力,浪费人工。而扭转弹簧5的使用,可以一直使得旋转臂4b的自由端有朝向推杆2的轴线运动的趋势,使得旋转臂4b可以一直夹持着待焊接钢板的侧面。从而一个人就可以完成夹具操作。
89.进一步的:
90.为了解决推杆2不易操作的技术问题,如图3、7、8所示,提供以下技术方案:
91.推杆2未设置夹板3的一端固定安装有旋转把手6,旋转把手6 的把手部分为便于人手把持的形状。
92.具体的,旋转把手6的把手部分还设置有防滑的凹槽,旋转把手 6的设置方便推杆2进行旋转推动,在操作时只需要旋转旋转把手6 便可以操作推杆2驱动,省时省力。
93.进一步的:
94.为了解决夹具整体不易把持的技术问题,如图3、7、8所示,提供以下技术方案:
95.主体1上固定安装有固定把手7,固定把手7为便于人手把持的形状。
96.具体的,固定把手7外部还设置有防滑的凹槽,在操作夹具时,可以通过一只手握持固定把手7来相对固定夹具,可以更方便的对夹具进行操作。
97.本实用新型的工作原理:
98.步骤一、放置夹具:焊接开始前放置夹具,将旋转臂4b掰开,使得相对的旋转臂4b分别抵住目标钢板的上下侧边。
99.步骤二、夹持夹具:一只手把持固定把手7,另一只手旋转旋转把手6,使得推杆2推动夹板3抵紧目标钢板的一侧面,在夹板3抵紧目标钢板的一侧面时,卡爪4c也会抵紧目标钢板另一侧面的上下靠近边缘的部分。此时双手可松开夹具,目标钢板被抵紧。
100.步骤三、焊接:操作焊枪对钢板进行焊接。焊接时,卡爪4c抵住了钢板焊接面靠近侧边的部分,同时夹板3抵住了目标钢板的另一侧面的中间部分,使得钢板不能沿着焊接面向内卷曲:两边被卡爪 4c抵住无法内卷,中间被夹板3抵住无法凸起,阻止了钢板的焊接变形。
101.步骤四、松开夹具:焊接好之后,松开夹具:一只手把持固定把手7,另一只手旋转旋转把手6,使得推杆2拉动夹板3松开目标钢板的一侧面,待夹板3完全松开钢板后,掰开旋转臂4b,使得旋转臂4b松开目标钢板,取下夹具。
102.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内。本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1