一种基于神经网络的三维机器人激光切割专用控制系统
1.本实用新型涉及机器人控制设备工具技术领域,具体涉及一种基于神经网络的三维机器人激光切割专用控制系统。
背景技术:
2.激光切割是一种使用激光切割材料的技术,通常用于工业制造应用,但也开始被学校、小企业和业余爱好者使用,激光切割的工作原理一般是通过光学器件引导高功率激光输出,激光光学系统和数控系统用于引导材料或引导产生的激光束,用于切割材料的商用激光器往往需要配合相应的运动控制系统,用以跟踪要切割的轨迹对应的数控指令或g代码。
3.现有的激光切割控制设备结构简单,在实际使用过程中只能依固定的方式安装在切割设备的周围来进行操作,没有相应的防护机构,在不使用的时候也无法收纳起来,这样很容易因为切割环境而造成显示设备或者控制设备损坏的情况,同时传统的激光切割控制设备散热效果较差,不便使用者长时间频繁操作使用。
技术实现要素:
4.针对背景技术中提到的问题,本实用新型的目的是提供专利名称车,以解决背景技术中提到的问题。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种基于神经网络的三维机器人激光切割专用控制系统,包括外箱、显示机构和排风机构,所述外箱包括箱壳和箱盖,所述箱盖安装在箱壳的前端面,且箱盖与箱壳转动连接,所述显示机构安装在箱壳的中部,且显示机构与箱壳固定连接,所述排风机构对称设置在箱壳的后端面,且排风机构与箱壳固定连接。
7.通过采用上述技术方案,来保证使用者可以通过箱壳来安装显示机构和排风机构来使用,同时通过对箱盖的设置来保证对箱壳进行的前端进行密封的目的,通过对显示机构的设置来保证使用者更好的进行观察使用,通过对排风机构的设置来实时对箱壳内部进行散热使用。
8.较佳的,所述箱壳的中部水平设置有隔板,所述隔板与箱壳垂直固定连接,所述箱壳的侧面还安装有通风网,所述通风网与箱壳可拆卸固定连接。
9.通过采用上述技术方案,来保证通过隔板来将箱壳分隔成为两部分,同时通过对通风网的设置来保证箱壳侧面进行通风使用。
10.较佳的,所述箱盖的头部开设有观察窗,所述观察窗与箱盖固定连接,所述箱盖的前端面还安装有操作台,所述操作台与箱盖转动连接。
11.通过采用上述技术方案,来保证使用者可以通过观察窗来更好的观察显示屏的目的,同时通过对操作台的设置来保证使用者更好的进行操作使用。
12.较佳的,所述显示机构包括导板、弧形架和显示屏,所述导板后端面的中部固定安
装有电动杆,所述弧形架固定安装在导板的中部,所述显示屏固定安装在弧形架的头部。
13.通过采用上述技术方案,来保证使用者可以通过导板、弧形架来安装显示屏的目的,保证通过显示屏来进行观察操作的目的。
14.较佳的,所述箱壳的内侧面上还对称设置有导向杆,所述导向杆与箱壳垂直固定连接,所述导板滑动安装在导向杆的中部。
15.通过采用上述技术方案,来保证通过导向杆来安装导板,保证导板可以稳定的在导向杆上进行滑动的目的。
16.较佳的,所述排风机构包括安装框和风扇,所述风扇安装在安装框的中部,且风扇与安装框固定连接。
17.通过采用上述技术方案,来保证使用者可以通过安装框来固定风扇,保证使用者可以通过风扇来实时进行散热作业。
18.综上所述,本实用新型主要具有以下有益效果:本实用新型通过对传统的切割机器人控制设备结构和控制过程加以研究,设计出一种基于神经网络的三维机器人激光切割专用控制系统,保证使用者需要使用的时候通过隔板将箱壳分隔成为两部分,这样使用者可以在隔板的上端安装相应的显示机构,同时在隔板的下端来安装相应的控制设备和相应的元器件,并且使用者可以通过观察窗进行观察使用,不使用的时候可以将显示屏收纳在箱壳的内部,在使用过程中使用者可以通过排风机构来进行排风作业,同时使用者可以通过通风网来保证箱壳内部更好的进行排风作业,并且使用者在箱盖的前端安装操作台,保证使用者更好的在外部进行操作输入使用。
附图说明
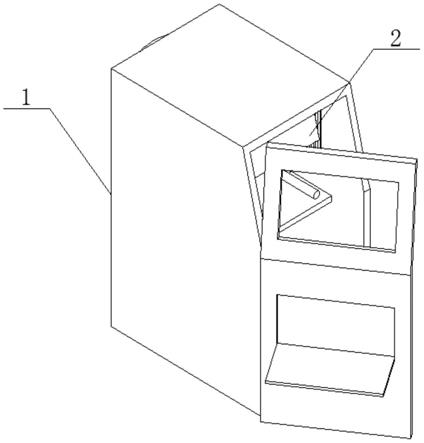
19.图1是本实用新型装置的立体图;
20.图2是图1所示装置的右视图;
21.图3是图1所示装置的后视图;
22.图4是图1所示外箱的结构示意图;
23.图5是图4所示装置的后视图;
24.图6是图1所示显示机构的结构示意图;
25.图7是图6所示装置的正视图。
26.附图标记:1、外箱;11、箱壳;111、隔板;112、通风网;113、导向杆;114、环形套;115、限位块;116、挡板;12、箱盖;121、观察窗;122、操作台;2、显示机构;21、导板;211、电动杆;22、弧形架;23、显示屏;3、排风机构;31、安装框;32、风扇。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.参考图1、图2、图3、图4、图5、图6和图7,一种基于神经网络的三维机器人激光切割专用控制系统,包括外箱1、显示机构2和排风机构3,外箱1包括箱壳11和箱盖12,箱盖12安
装在箱壳11的前端面,且箱盖12与箱壳11转动连接,通过对传统的切割机器人控制设备结构和控制过程加以研究,设计出一种基于神经网络的三维机器人激光切割专用控制系统,保证使用者需要三维机器人进行激光切割的时候,首先采用通过神经网络预先对大量的机器人在不同姿态不同激光控制参数下的切割割缝进行分析,分析割缝宽度,割缝挂渣,割缝过烧等情况,得到机器人工具端切割头不同姿态下的最优激光控制参数,生成激光工艺参数数据库,实际机器人作业时候,预先导入加工工件的轨迹路径规划,通过上位机模块,底层单片机驱动控制模块,机器人模块之间的通讯交互,根据加工轨迹的情况实时自动改变各种激光控制参数,完成三维激光切割功能,精度高,效果好,降低操作工的操作难度,这样在使用的过程中往往需要相同的,这样在实际控制的过程中往往需要不断的进行控制和观察使用,当需要使用的时候使用者可以通过箱壳11的内部安装隔板111,保证将箱壳11分隔成为两部分,这样使用者可以在隔板111的上端安装相应的显示机构2,保证使用者可以在箱壳11外部进行控制,同时在隔板111的下端来安装相应的控制设备和相应的元器件,使用者可以通过电动杆211来稳定的带动导板21在导向杆113上进行滑动,保证通过导板21来带动弧形架22和显示屏23在箱壳11内部进行移动,这样当使用者需要观察显示屏23的时候可以将显示屏23移动到前端,保证使用者可以通过观察窗121进行观察使用,不使用的时候可以将显示屏23收纳在箱壳11的内部,并且使用者可以在箱壳11的外部安装脚踏开关,保证使用者更灵活的控制电动杆211伸缩使用,在使用过程中使用者可以通过排风机构3来进行排风作业,同时使用者可以通过通风网112来保证箱壳11内部更好的进行排风作业,并且使用者在箱盖12的前端安装操作台122,保证使用者更好的在外部进行操作输入使用,有效的解决了现有的激光切割控制设备结构简单,在实际使用过程中只能依固定的方式安装在切割设备的周围来进行操作,没有相应的防护机构,在不使用的时候也无法收纳起来,这样很容易因为切割环境而造成显示设备或者控制设备损坏的情况,同时传统的激光切割控制设备散热效果较差,不便使用者长时间频繁操作使用的问题;
29.箱壳11的中部水平设置有隔板111,隔板111与箱壳11垂直固定连接,箱壳11的侧面还安装有通风网112,通风网112与箱壳11可拆卸固定连接,通过对隔板111的设置来保证将箱壳11内部空间进行分隔,保证将显示屏23和控制元件来分隔安装使用,这样使用者可以通过风扇32来分布进行散热作业,进而保证更好的散热效果,同时通过对通风网112的设置来保证壳体的侧面更好进行通风使用,箱盖12的头部开设有观察窗121,观察窗121与箱盖12固定连接,箱盖12的前端面还安装有操作台122,操作台122与箱盖12转动连接,通过对观察窗121的设置来保证使用者更好的进行观察显示屏23的目的,同时通过对操作台122的设置来保证使用者更好的进行控制操作使用,箱壳11的内侧面上还对称设置有导向杆113,导向杆113与箱壳11垂直固定连接,导板21滑动安装在导向杆113的中部,通过对导向杆113和导板21的设置来保证相互滑动配合,保证显示屏23可以灵活的进行滑动使用,箱壳11的后端面对称设置有供安装框31安装的环形套114,环形套114与箱壳11一体成型,且环形套114上扣合有密封盖,通过对环形套114的设置来保证风扇32可以稳定的进行安装使用,同时通过对密封盖的设置来保证风扇32不使用的时候可以将环形套114密封上,避免外部灰尘进入到箱壳11内部,箱壳11的侧面对称设置有限位块115,通过两侧限位块115的设置来保证挡板116进行夹持,限位块115上安装有挡板116,挡板116与限位块115纵向滑动连接,方便使用者可以通过挡板116来对通风网112进行密封使用者,当需要通过通风网112进行
通风的时候将挡板116滑动下来;
30.显示机构2安装在箱壳11的中部,且显示机构2与箱壳11固定连接,显示机构2包括导板21、弧形架22和显示屏23,导板21后端面的中部固定安装有电动杆211,弧形架22固定安装在导板21的中部,显示屏23固定安装在弧形架22的头部,通过对显示机构2的结构设置来保证使用者通过导板21和弧形架22来安装显示屏23,进而方便带动显示屏23同步移动的目的;
31.排风机构3对称设置在箱壳11的后端面,且排风机构3与箱壳11固定连接,排风机构3包括安装框31和风扇32,风扇32安装在安装框31的中部,且风扇32与安装框31固定连接,通过对排风机构3的结构设置来保证使用者可以通过安装框31来安装风扇32的目的,同时通过对风扇32的设置来稳定的进行排风作业。
32.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1