一种双工位多维度焊接工作站的制作方法
1.本发明涉及机械焊接领域,尤其涉及一种双工位多维度焊接工作站。
背景技术:
2.以往工程机械行业构件大多采用人工焊接,劳动强度大,焊接质量得不到保证。近几年开始大量采用焊接机器人代替普通工人进行焊接,提高了品质的同时还提高了产量降低了成本。但是,焊接机器人焊接时,在焊接的过程中,如果材料的位置相对稳定,那么焊接的质量就会比较好,工件最后成型的结构标准。但是,如果焊接过程中,材料的位置发生变动,就会导致最后工件的整体结构出现偏差,变形。多维度片状构件是一种异形件,如建筑用吊篮的四周侧壁构件,常是由若干杆状钢材通过焊接连接而成。焊接这类工件时,需要对焊接进行准确的定位,比较耗时。此外,焊接工作环境恶劣,焊接过程产生的烟尘、有毒气体等严重危害车间工人的身心健康,提高生产效率是目前亟待解决的问题。
技术实现要素:
3.本实用新型的目的在于,针对现有技术的不足,提供一种双工位多维度焊接工作站。
4.本实用新型采用的技术方案如下。
5.一种双工位多维度焊接工作站,其特征在于:包括多关节焊接机器人安装底座、两焊接作业支架、顶罩、抽风机;
6.两焊接作业支架沿多关节焊接机器人安装底座左、右对称设置;
7.各焊接作业支架包括纵向设置的底板、前支架、后支架、前旋转轴、后旋转轴、片状构件安装架、定位板、若干定位插杆;
8.底板的前、后两端分别设有前支架、后支架,前支架上套装有前旋转轴,后支架套装有后旋转轴,前旋转轴、后旋转轴的中轴线在同一纵向直线上;片状构件安装架的前、后两端分别与前旋转轴、后旋转轴相连;
9.后旋转轴上安装有定位板,后支架的前侧面上定位板的上方或下方纵向设有若干定位插孔,各定位插孔沿后旋转轴的中轴线环形阵列;通过若干分别插入定位插孔内的定位插杆来控制片状构件安装架与地面的夹角;
10.多关节焊接机器人安装底座上垂直向安装有转盘驱动电机,转盘驱动电机上安装有中轴线垂直于地面的转盘,转盘上安装有多关节焊接机器人;
11.两前支架中,一前支架的前端的远离另一前支架侧设有控制柜;
12.两底板分别通过若干立柱与顶罩相连;顶罩的顶端安装有抽风机,抽风机通过管道外接尾气处理装置;顶罩上设有可向多关节焊接机器人提供焊丝的可转动的焊丝盘;多关节焊接机器人安装底座的前侧设有备用焊机、备用焊机通过电缆与焊枪相连;至少一立柱上设有焊枪挂架。
13.本实用新型的有益效果是:片状构件安装架可沿通过其形心的纵向直线转动,并
通过若干分别插入定位插孔内的定位插杆来控制片状构件安装架与地面的夹角,便于针对不同的片状构件焊接需要进行调整,消除焊接死角;设有两个工位,当一个工位人工进行焊接材料安装时,另一个工位进行焊接,可以实现流水线作业;采用多关节焊接机器人,可以实现自动焊接;设有控制柜,可以控制焊接进度。顶罩上设有可向多关节焊接机器人提供焊丝的可转动的焊丝盘,可以自动供应焊丝。顶罩的顶端安装有抽风机,抽风机通过管道外接尾气处理装置,可以解决焊接过程产生的烟尘、有毒气体等严重危害车间工人的身心健康的问题。多关节焊接机器人安装底座的前侧设有备用焊机,可以解决焊接过程产生的烟尘、有毒气体等严重危害车间工人的身心健康的问题。
14.作为优选技术方案,片状构件安装架上设有若干夹具。
15.作为优选技术方案,片状构件安装架上设有若干定位螺钉孔。
16.作为优选技术方案,各焊接作业支架的前支架或后支架顶端上设有光电传感器。设有光电传感器,可以监控各焊接作业支架上多关节焊接机器人的焊接半径内是否有人员,焊接比较安全。
17.作为优选技术方案,多关节焊接机器人安装底座的前侧设有用于挂放电缆的电缆架。
18.作为优选技术方案,至少一立柱的底端设有灭火器支架,灭火器支架上安装有灭火器。
19.作为优选技术方案,顶罩上垂直向连接有连杆,连杆的底端位于多关节焊接机器人的正后方,焊丝盘安装在连杆的底端。
20.作为优选技术方案,顶罩底面的四周纵向连接有透明的塑料条带。
21.作为优选技术方案,顶罩上设有照明灯。
22.作为优选技术方案,备用焊机底部设有若干滚轮。
附图说明
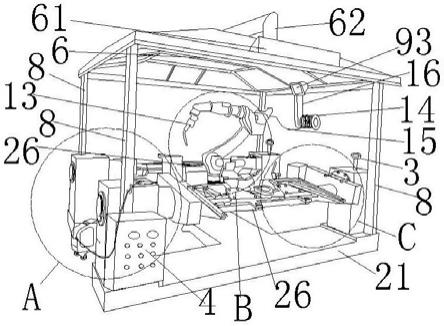
23.图1是本实用新型双工位多维度焊接工作站一较佳实施例的结构示意图。
24.图2是图1的a部分的局部放大图。
25.图3是图1的b部分的局部放大图。
26.图4是图1的c部分的局部放大图。
27.图5是图1所示双工位多维度片状构件焊接装置焊接时的示意图。
28.图6是图5的d部分的局部放大图。
29.图7是图5的e部分的局部放大图。
30.图8是本实用新型双工位多维度焊接工作站一较佳实施例的结构示意图。
31.图9是图8的f部分的局部放大图。
32.图10是本实用新型双工位多维度焊接工作站一较佳实施例的结构示意图。
33.图11是图10的g部分的局部放大图。
34.图12是本实用新型双工位多维度焊接工作站一较佳实施例的结构示意图。
35.图13是一种焊接后的片状构件的示意图。
36.其中:多关节焊接机器人安装底座-1;转盘驱动电机-11;转盘-12;多关节焊接机器人-13;焊丝盘-14;焊丝-15;连杆-16;
37.底板-21;前支架-22;后支架-23;前旋转轴-24;后旋转轴-25;片状构件安装架-26;定位插杆-27;定位插孔-28;定位板-29;定位螺钉孔-210;夹具-211;
38.光电传感器-3;
39.控制柜-4;
40.待焊接件5安装孔51
41.顶罩-6;抽风机-61;管道-62;塑料条带-63;
42.备用焊机-7;电缆-71;焊枪-72;焊枪挂架-73;电缆架-74;滚轮-75;
43.立柱-8;灭火器支架-81;灭火器-82;
44.灭火器支架-91;灭火器-92;照明灯-93。
具体实施方式
45.下面,结合附图和实施例对本实用新型作进一步说明。
46.实施例1。如图1-7所示,一种双工位多维度焊接工作站,包括多关节焊接机器人安装底座1、两焊接作业支架、顶罩6、抽风机61。
47.两焊接作业支架沿多关节焊接机器人安装底座1左、右对称设置。
48.各焊接作业支架包括纵向设置的底板21、前支架22、后支架23、前旋转轴24、后旋转轴25、片状构件安装架26、定位板29、两定位插杆27。
49.底板21的前、后两端分别设有前支架22、后支架23,前支架22上套装有前旋转轴24,后支架23套装有后旋转轴25,前旋转轴24、后旋转轴25的中轴线在同一纵向直线上;片状构件安装架26的前、后两端分别与前旋转轴24、后旋转轴25相连。
50.后旋转轴25上安装有定位板29,后支架23的前侧面上定位板29的上方或下方纵向设有若干定位插孔28,各定位插孔28沿后旋转轴25的中轴线环形阵列;通过若干分别插入定位插孔28内的定位插杆27来控制片状构件安装架26与地面的夹角。
51.多关节焊接机器人安装底座1上垂直向安装有转盘驱动电机11,转盘驱动电机11上安装有中轴线垂直于地面的转盘12,转盘12上安装有多关节焊接机器人13。
52.两前支架22中,一前支架22的前端的远离另一前支架22侧设有控制柜4。
53.两底板21分别通过四立柱8与顶罩6相连;顶罩6的顶端安装有抽风机61,抽风机61通过管道62外接尾气处理装置;顶罩6上设有可向多关节焊接机器人提供焊丝15的可转动的焊丝盘14;多关节焊接机器人安装底座1的前侧设有备用焊机7、备用焊机7通过电缆71与焊枪72相连;至少一立柱8上设有焊枪挂架73。焊接好的构件如图13所示。
54.片状构件安装架26可沿通过其形心的纵向直线转动,并通过若干分别插入定位插孔28内的定位插杆27来控制片状构件安装架26与地面的夹角,便于针对不同的片状构件焊接需要进行调整,消除焊接死角;设有两个工位,当一个工位人工进行焊接材料安装时,另一个工位进行焊接,可以实现流水线作业;采用多关节焊接机器人13,可以实现自动焊接;设有控制柜,可以控制焊接进度。顶罩6上设有可向多关节焊接机器人提供焊丝15的可转动的焊丝盘14,可以自动供应焊丝。顶罩6的顶端安装有抽风机61,抽风机61通过管道62外接尾气处理装置,可以解决焊接过程产生的烟尘、有毒气体等严重危害车间工人的身心健康的问题。多关节焊接机器人安装底座1的前侧设有备用焊机7,可以解决焊接过程产生的烟尘、有毒气体等严重危害车间工人的身心健康的问题。
55.作为优选技术方案,片状构件安装架26上设有若干夹具211。
56.作为优选技术方案,片状构件安装架26上设有若干定位螺钉孔210。
57.作为优选技术方案,各焊接作业支架的前支架22或后支架23顶端上设有光电传感器3。
58.作为优选技术方案,顶罩6上垂直向连接有连杆16,连杆16的底端位于多关节焊接机器人的正后方,焊丝盘14安装在连杆16的底端。
59.作为优选技术方案,顶罩6上设有照明灯93。
60.作为优选技术方案,备用焊机7底部设有若干滚轮75。
61.实施例2。如图8-9所示,本实施例与实施例1的不同在于:最前方的底板21的右端的立柱8的底端设有灭火器支架91,灭火器支架91上安装有灭火器92。
62.实施例2。如图10-11所示,本实施例与实施例1的不同在于:多关节焊接机器人安装底座1的前侧设有用于挂放电缆71的电缆架74。
63.实施例4。如图12所示,本实施例与实施例1的不同在于顶罩6底面的四周纵向连接有透明的塑料条带63。设有透明的塑料条带63,便于高效吸收焊接过程产生的烟尘、有毒气体,且不影响操作人员焊接操作。
64.以上所列举的实施方式仅供理解本实用新型之用,并非是对本实用新型所描述的技术方案的限定,有关领域的普通技术人员,在权利要求所述技术方案的基础上,还可以作出多种变化或变形,所有等同的变化或变形都应涵盖在本实用新型的权利要求保护范围之内。本实用新型未详述之处,均为本技术领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1