一种焊接机器人安装底座的制作方法
1.本实用新型涉及机械配件技术领域,更具体地说,本实用新型涉及一种焊接机器人安装底座。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(manipulator),具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂,焊接机器人安装在工作台上,需要在两者之间安装一个安装底座,以此对焊接机器人进行固定。
3.但是其在实际使用时,仍旧存在较多缺点,焊接机器人在与安装底座进行安装的过程中,需要使用到多组锁定螺栓进行固定,以此增大了工作量,降低了其实用性。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种焊接机器人安装底座,通过利用插杆来限位卡住多组插销,配合自动复位的定位杆穿过插杆上的第二通孔,利用卡合的方式,从而将整体进行联动,达到快速固定的效果,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种焊接机器人安装底座,包括安装座、焊接机器人、锁定件、插销、第一通孔、插杆、第二通孔、固定架、定位杆、固定块、紧固弹簧、调节件、滑轨、支撑板、插孔、定位销,所述安装座的上方设置有焊接机器人,所述安装座的内部设置有调节件,所述安装座与焊接机器人的连接处设置有锁定件,所述安装座的下方设置有工作台;
6.所述锁定件包括有插销,所述插销的底端位置处沿水平方向上开设有第一通孔,所述第一通孔的内部贯穿设置有插杆,所述插杆的内部沿竖直方向上开设有第二通孔,所述锁定件还包括有与安装座外侧壁固定连接的固定架,所述固定架的内部沿竖直方向上贯穿设置有定位杆,所述定位杆的外表面位置处固定设置有固定块,所述定位杆的外部靠近固定块上方设置有紧固弹簧。
7.在一个优选地实施方式中,所述定位杆与固定架之间通过滑动方式相连接,所述定位杆的底端与插杆上的第二通孔之间通过卡合方式相连接。
8.在一个优选地实施方式中,所述安装座和焊接机器人的四个拐角位置处分别开设有一组相对应的安装孔。
9.在一个优选地实施方式中,所述插销和插杆均为t字形结构,其中插销和插杆的外部均固定套设有紧固胶垫。
10.在一个优选地实施方式中,所述调节件包括有与安装座内侧壁固定连接的两组滑轨,两组所述滑轨之间沿水平方向上设置有支撑板,所述滑轨的侧表面沿竖直方向上等距开设有多组插孔,所述插孔的内部嵌入设置有定位销。
11.在一个优选地实施方式中,所述支撑板与滑轨之间通过滑动方式相连接。
12.在一个优选地实施方式中,所述滑轨上的插孔与定位销之间通过卡合方式相连接,所述定位销的外部套设有紧固垫圈。
13.本实用新型的技术效果和优点:
14.1、本实用新型通过整体设计,利用插杆来限位卡住多组插销,配合自动复位的定位杆穿过插杆上的第二通孔,利用卡合的方式,从而将整体进行联动,达到快速固定的效果,保证了整体安装后的稳定性,并且方便了人们进行拆卸安装,具备较高的实用性;
15.2、本实用新型通过设置了调节件,根据实际情况在滑轨上调节支撑板至指定位置处,随后将定位销插入到插孔中,进而将支撑板进行固定,以此达到调节安装座内部空间的效果,便于向内部储纳东西,提高了安装座的功能性。
附图说明
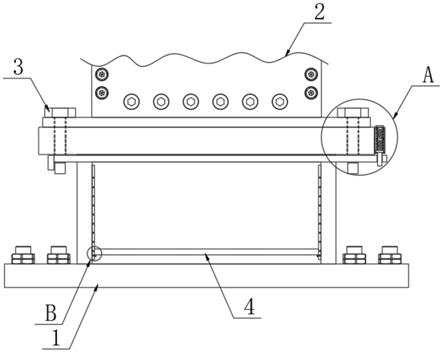
16.图1为本实用新型的整体结构示意图。
17.图2为本实用新型图1中a部分的放大结构示意图。
18.图3为本实用新型图1中b部分的放大结构示意图。
19.附图标记为:1安装座、2焊接机器人、3锁定件、31插销、32第一通孔、33插杆、34第二通孔、35固定架、36定位杆、37固定块、38紧固弹簧、4调节件、41滑轨、42支撑板、43插孔、44定位销。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.如附图1、附图2和附图3所示的一种焊接机器人安装底座,包括安装座1、焊接机器人2、锁定件3、插销31、第一通孔32、插杆33、第二通孔34、固定架35、定位杆36、固定块37、紧固弹簧38、调节件4、滑轨41、支撑板42、插孔43、定位销44,所述安装座1的上方设置有焊接机器人2,所述安装座1的内部设置有调节件4,所述安装座1与焊接机器人2的连接处设置有锁定件3,所述安装座1的下方设置有工作台;
22.所述锁定件3包括有插销31,所述插销31的底端位置处沿水平方向上开设有第一通孔32,所述第一通孔32的内部贯穿设置有插杆33,所述插杆33的内部沿竖直方向上开设有第二通孔34,所述锁定件3还包括有与安装座1外侧壁固定连接的固定架35,所述固定架35的内部沿竖直方向上贯穿设置有定位杆36,所述定位杆36的外表面位置处固定设置有固定块37,所述定位杆36的外部靠近固定块37上方设置有紧固弹簧38。
23.进一步的,所述定位杆36与固定架35之间通过滑动方式相连接,所述定位杆36的底端与插杆33上的第二通孔34之间通过卡合方式相连接,以便于定位杆36插入第二通孔34
中,进而将定位杆36和插杆33紧固在一起。
24.进一步的,所述安装座1和焊接机器人2的四个拐角位置处分别开设有一组相对应的安装孔,以便于将插销31插入到安装孔中,进而将安装座1和焊接机器人2两者联动在一起。
25.进一步的,所述插销31和插杆33均为t字形结构,其中插销31和插杆33的外部均固定套设有紧固胶垫。
26.进一步的,所述调节件4包括有与安装座1内侧壁固定连接的两组滑轨41,两组所述滑轨41之间沿水平方向上设置有支撑板42,所述滑轨41的侧表面沿竖直方向上等距开设有多组插孔43,所述插孔43的内部嵌入设置有定位销44,所述支撑板42与滑轨41之间通过滑动方式相连接,以便于支撑板42在滑轨41中进行滑动,进而来调节安装座1的内部空间,便于根据实际情况来放置不同的物品。
27.进一步的,所述滑轨41上的插孔43与定位销44之间通过卡合方式相连接,所述定位销44的外部套设有紧固垫圈,以便于通过定位销44直接插入到插孔43中,进而对支撑板42进行限位。
28.本实用新型工作原理:
29.参照说明书附图1、附图2和附图3,将焊接机器人2放置在安装座1上,并且将两者的四个拐角位置处对齐,分别将插销31从四个拐角位置处向下插入,插杆33从一侧插入插销31上的第一通孔32中,随即握住定位杆36向上拉动,定位杆36在固定架35内部滑动,定位杆36上的固定块37带动紧固弹簧38进行压缩,当插杆33穿过插销31上的第一通孔32到达指定位置处时,松开定位杆36,自动复位的定位杆36就会穿过插杆33上的第二通孔34,利用卡合的方式,达到快速固定的效果,保证了整体安装后的稳定性;
30.另外,在滑轨41上调节支撑板42的位置,根据实际情况将其调节至指定位置处,随后将定位销44插入到插孔43中,进而将支撑板42进行固定,以此达到调节安装座1内部空间的效果,便于向内部储纳东西,提高了安装座1的功能性。
31.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
32.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
33.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1