一种管道自动焊接生产线
1.本发明属于工业机器人领域,具体涉及一种管道自动焊接生产线。
背景技术:
2.随着现代物流业的快速发展,快递、包裹等邮件数量不断增加,在一些物流中转中心每天都会有大量的邮件等待装卸、搬运,另外,随着工业生产机械化程度的增加,在工业生产的流程中,也需要焊接机器人参与作业,通过机器人搬运相关工件。现有的焊接机器人,结构复杂,制造成本高,小型工厂没有能力承担其高额的费用,占地面积大,装配不便,可靠性和集成度低。
技术实现要素:
3.有鉴于此,本发明的目的是旨在提供一种焊接机器人,该机器人结构简易,制造成本较低,适用于小型工厂完成搬运作业。
4.为实现上述技术目的,本发明采用的技术方案如下:
5.一种管道自动焊接生产线,包括管道外部焊接总成和管道内部焊接机器人;所述管道外部焊接总成包括用于支承待焊接管道并驱动其自转的管材旋转支撑装置、用于对管道进行焊接的焊接机器人和用于承载所述焊接机器人移动的轨道式移动小车;
6.所述轨道式移动小车包括两个平行设置的工字型导轨和小车底盘;所述小车底盘上设有两对与工字型导轨配合的行走轮;
7.所述焊接机器人包括机械臂和设置于所述机械臂末端的焊枪;所述机械臂包括底座、转动设置于所述底座上的转动座ⅰ、转动连接于所述转动座ⅰ的大臂1、转动连接于所述大臂外端的转动座ⅱ、转动连接于所述转动座ⅱ的小臂、转动连接于所述小臂外端的转动座ⅲ、转动连接于所述转动座ⅲ的焊枪安装座,以及用于分别对应驱动所述转动座ⅰ、大臂、转动座ⅱ、小臂、转动座ⅲ和焊枪安装座转动的电机ⅰ、电机ⅱ、电机ⅲ、电机ⅳ、电机
ⅴ
和电机
ⅵ
。
8.所述管材旋转支撑装置包括两个沿管材轴向分布的旋转支撑组件;所述旋转支撑组件包括条形底座、设置于所述条形底座上的两个对置设置的固定支撑架和活动支撑架,以及用于驱动所述活动支撑架沿条形底座滑动的电动缸;所述固定支撑架和活动支撑架均包括转轴架、铰接于所述转轴架上的轮架和安装于所述轮架上的两个滚轮;所述固定支撑架上的两个滚轮的轮轴之间通过同步带实现同步转动,且固定支撑架上设有滚轮驱动电机;所述滚轮驱动电机通过带传动机构驱动固定支撑架上的滚轮转动。
9.所述管道内部焊接机器人包括柱形机架、围绕所述柱形机架均匀设置的三个管内行走机构和设置于所述柱形机架前端的管内焊枪;
10.所述柱形机架包括后端电机座、中间体、前端电机座、连接于所述后端电机座与中间体之间的丝杠和滑杆;三根所述滑杆沿圆周方向均匀分布并固定于后端电机座与中间体之间,所述丝杠通过轴承支承在后端电机座与中间体之间;后端电机座内设有用于驱动丝
杠转动的丝杠驱动电机;所述前端电机座设置于中间体前端;前端电机座安装有焊接夹具旋转座和用于驱动所述焊接夹具旋转座转动的旋转座驱动电机;所述焊接夹具旋转座上安装有电动推杆,电动推杆外端通过夹具安装有焊枪;所述管内行走机构包括履带装置和铰接于所述履带装置与中间体之间以形成平行四边形连杆机构的两个履带连杆;所述滑杆滑动配合有螺母滑块,所述螺母滑块与丝杠通过螺纹配合,且螺母滑块与履带装置之间铰接有弹性支撑杆。
11.所述弹性支撑杆包括铰接于履带装置的导套、铰接于螺母滑块的导杆和外套于导杆的弹簧;导杆与导套之间滑动配合,导套上设有限位滑槽;所述导杆上固定有与限位滑槽配合的限位销。
12.本发明的有益效果为:本发明的管道自动焊接生产线利用焊接机器人对支撑于管材旋转支撑装置管道进行外部焊接;同时,还可以利用管道内部焊接机器人携带焊枪在管道内部行走并在管道内部进行焊接。
附图说明
13.本发明可以通过附图给出的非限定性实施例进一步说明;
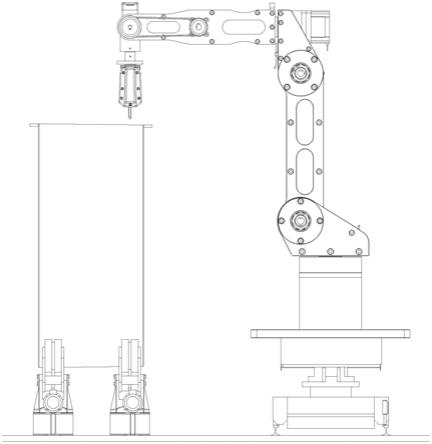
14.图1为本发明的焊接生产线的结构示意图;
15.图2为本发明的管材旋转支撑装置的轴测图;
16.图3为本发明的焊接机器人的轴测图;
17.图4为本发明的焊接机器人的剖视图ⅰ;
18.图5为本发明的焊接机器人的剖视图ⅱ;
19.图6为本发明的管道内部焊接机器人的结构示意图;
20.图7为本发明的弹性支撑杆的结构示意图。
具体实施方式
21.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
22.本实施例的管道自动焊接生产线包括管道外部焊接总成和管道内部焊接机器人;所述管道外部焊接总成包括用于支承待焊接管道并驱动其自转的管材旋转支撑装置、用于对管道进行焊接的焊接机器人和用于承载所述焊接机器人移动的轨道式移动小车。
23.如图1所示,本实施例中轨道式移动小车包括两个平行设置的工字型导轨和小车底盘;所述小车底盘上设有两对与工字型导轨配合的行走轮;小车底盘的驱动方式可采用现有的轮式小车底盘结构,在此不赘述。
24.如图3所示,所述焊接机器人包括机械臂和设置于所述机械臂末端的焊枪;所述机械臂包括底座11、转动设置于所述底座11上的转动座ⅰ12、转动连接于所述转动座ⅰ12的大臂113、转动连接于所述大臂113外端的转动座ⅱ112、转动连接于所述转动座ⅱ112的小臂110、转动连接于所述小臂110外端的转动座ⅲ17、转动连接于所述转动座ⅲ17的焊枪安装座16,以及用于分别对应驱动所述转动座ⅰ12、大臂113、转动座ⅱ112、小臂110、转动座ⅲ17和焊枪安装座 16转动的电机ⅰ114、电机ⅱ13、电机ⅲ14、电机ⅳ111、电机
ⅴ
19和电机
ⅵ
8。
25.如图4所示,底座1的上端面开设有阶梯孔,转动座ⅰ12的底部固定有插入所述阶梯
孔内的阶梯轴117,阶梯轴117与阶梯孔之间分别安装有深沟球轴承 116和推力轴承115,利用推力轴承115承载转动座ⅰ12以上部分的重量,电机ⅰ114设置于底座11内,其转轴固定连接于转动座ⅰ12底部,以驱动转动座
ⅰꢀ
12相对于底座11转动;
26.本实施例中,所述大臂113与小臂110均包括两平行设置的侧板和固定于两侧板之间的连接柱;所述侧板上分布有腰型减重孔;这种结构的臂体具有结构简单,制造成本低且自重小的优点,如图5所示为转动座ⅰ12与大臂113之间的关节处的结构;大臂113的两个侧板端部固定有转轴119,两转轴119通过轴承支承于转动座ⅰ12两侧壁的轴承座孔上,其中一个转轴设有花键孔118,电机ⅱ13固定安装于转动座ⅰ12内,其输出轴通过花键与转轴传动连接;大臂113与转动座ⅱ112之间的关节连接结构与转动座ⅰ12与大臂113之间关节结构类似,不再赘述;电机ⅳ111固定安装于转动座ⅱ112内,其输出轴与小臂110 的端部固定连接,从而驱动小臂110绕其纵向中心线自转。
27.本实施例中,所述电机
ⅴ
19安装于所述小臂110中部,其通过同步带传动机构15驱动所述转动座ⅲ17转动,转动座ⅲ17铰接于小臂110的外端,铰轴上固定安装有从动带轮,电机
ⅴ
19的输出轴固定安装主动带轮,使电机
ⅴ
19能够通过同步带驱动转动座ⅲ17转动;电机
ⅵ
18固定安装于转动座ⅲ17内,其输出轴固定有焊枪安装座16,焊枪可固定安装于该安装座16上。
28.如图2所示,本实施例的管材旋转支撑装置包括两个沿管材轴向分布的旋转支撑组件;所述旋转支撑组件包括条形底座23、设置于所述条形底座23上的两个对置设置的固定支撑架22和活动支撑架26,以及用于驱动所述活动支撑架 26沿条形底座23滑动的电动缸;所述固定支撑架22和活动支撑架26均包括转轴架24、铰接于所述转轴架24上的轮架和安装于所述轮架上的两个滚轮25;所述固定支撑架22上的两个滚轮25的轮轴之间通过同步带实现同步转动,且固定支撑架22上设有滚轮驱动电机21;所述滚轮驱动电机21通过带传动机构驱动固定支撑架22上的滚轮25转动。
29.如图6所示,所述管道内部焊接机器人包括柱形机架、围绕所述柱形机架均匀设置的三个管内行走机构和设置于所述柱形机架前端的管内焊枪36;
30.所述柱形机架包括后端电机座、中间体35、前端电机座、连接于所述后端电机座与中间体35之间的丝杠31和滑杆310;三根所述滑杆310沿圆周方向均匀分布并固定于后端电机座与中间体35之间,而丝杠31通过轴承支承在后端电机座与中间体35之间;后端电机座内设有用于驱动丝杠31转动的丝杠31驱动电机;所述前端电机座设置于中间体35前端,其安装有焊接夹具旋转座37 和用于驱动所述焊接夹具旋转座转动的旋转座驱动电机;焊接夹具旋转座37上安装有电动推杆,电动推杆外端通过夹具安装有焊枪36;所述管内行走机构包括履带装置39和铰接于所述履带装置39与中间体35之间以形成平行四边形连杆机构的两个履带连杆34;所述滑杆310滑动配合有螺母滑块32,而所述螺母滑块32与丝杠31通过螺纹配合,且螺母滑块32与履带装置39之间铰接有弹性支撑杆33;如图7所示,所述弹性支撑杆33包括铰接于履带装置39的导套 331、铰接于螺母滑块32的导杆334(导杆334一端设有铰接件333)和外套于导杆334的弹簧332;导杆334与导套331之间滑动配合,导套331上设有限位滑槽;导杆334上固定有与限位滑槽配合的限位销335。所述履带装置39包括履带、与履带配合的履带轮和用于驱动履带轮转动的履带驱动电机。所述前端电机座的前端面上还设有照明灯和摄像头38;采用管道内部焊接机器人进行焊接时,丝杠31驱动电机驱动丝杠
31转动使螺母滑块32沿着滑杆310滑动,进而使弹性支撑杆33的导杆相对于导套相对滑动并压缩弹簧,最终向外同步推动三个履带装置39使其贴近在管道的内壁;履带装置39内端履带驱动电机转动,实现整个机器人在管道内移动;当移动到待焊接位置时,履带电机停止转动,履带电机采用蜗轮蜗杆减速电机,因此,当其停止转动时,能够锁定整个机器人的位置;最后由旋转座驱动电机带动夹持有焊枪的焊接夹具旋转座转动,电动推杆伸出使焊枪伸出至焊接位置完成管道内焊接作业。
31.以上具体实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1