1.本实用新型属于焊接装置技术领域,尤其涉及一种不锈钢叶轮激光焊接系统。
背景技术:2.焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。现有技术中的自动焊接机构大都仍采用气保焊的焊接方式,焊接效率有待提高。
3.例如,中国实用新型专利公开了一种焊接机构及焊接专机[申请号:201920775951.4],该实用新型专利包括焊接组件、底座以及夹紧组件,所述夹紧组件固定在所述底座上,所述夹紧组件用于对待焊接工件进行固定,所述底座上设有散热组件,当焊接机构对待焊接工件进行焊接时,焊接产生的热量能够通过所述夹紧组件传递至所述底座上,所以所述散热组件能够对底座进行散热,进而对焊接机构进行散热。
[0004]
该实用新型具有可防止焊接机构温度过高,影响焊接机构正常工作以及影响设备的使用寿命的优势,但其仍未解决上述问题。
技术实现要素:[0005]
本实用新型的目的是针对上述问题,提供一种可实现激光焊接,焊接效率高的不锈钢叶轮激光焊接系统。
[0006]
为达到上述目的,本实用新型采用了下列技术方案:
[0007]
一种不锈钢叶轮激光焊接系统,包括焊接机器人,所述焊接机器人的端部设有焊接头,还包括用于安装叶轮且可带动叶轮发生翻转和旋转的叶轮安装组件,所述叶轮安装组件位于焊接机器人的一侧,所述焊接头为激光焊接头,焊接头一端固定连接在焊接机器人上,另一端竖直向下延伸,移动焊接机器人可使焊接头位于叶轮安装组件的正上方。
[0008]
在上述的不锈钢叶轮激光焊接系统中,所述叶轮安装组件包括固定连接在安装平台上的底板,所述底板上设有翻转组件,所述翻转组件上连接有转动驱动组件,所述转动驱动组件的一端驱动连接有用于安装叶轮的安装盘。
[0009]
在上述的不锈钢叶轮激光焊接系统中,所述翻转组件包括翻转板,所述转动驱动组件连接在翻转板上,还包括至少一个固定连接在底板上的驱动翻转电机,所述翻转板的一端通过摆臂与驱动翻转电机的输出轴驱动连接,所述摆臂一端固定连接在输出轴上,另一端沿输出轴的径向延伸并与翻转板的端部相连。
[0010]
在上述的不锈钢叶轮激光焊接系统中,所述驱动翻转电机设有两个且分别位于翻转板的两端外侧,两个驱动翻转电机分别通过两个摆臂与翻转板的两端相连。
[0011]
在上述的不锈钢叶轮激光焊接系统中,所述摆臂靠近翻转板的一端设有弯折部,所述弯折部位于翻转板下方且与翻转板底面相贴合,所述弯折部的延伸方向与翻转板的延伸方向相平行。
[0012]
在上述的不锈钢叶轮激光焊接系统中,所述翻转板包括固定连接的下底板、框架
和面板,所述下底板、框架和面板围合形成减重空腔,所述弯折部固定连接在下底板的底面上。
[0013]
在上述的不锈钢叶轮激光焊接系统中,所述转动驱动组件包括固定连接在翻转板上的箱体,所述箱体内具有容纳空腔,驱动旋转电机设置在容纳空腔内,驱动旋转电机驱动连接有旋转盘,所述安装盘固定连接在旋转盘上,所述旋转盘的一侧还设有顶紧组件,所述顶紧组件连接在翻转板上且顶紧组件的一端压设在旋转盘侧面。
[0014]
在上述的不锈钢叶轮激光焊接系统中,所述箱体上还设有镂空的通风孔,所述通风孔与容纳空腔相连通。
[0015]
在上述的不锈钢叶轮激光焊接系统中,所述顶紧组件包括固定连接在旋转盘上的安装板,所述安装板上固定连接有两块相对设置的导向块,所述导向块内表面上设有向导向块内部凹陷的导向槽,顶紧块滑动连接在导向槽内,所述顶紧块的一侧设有弹簧,所述弹簧远离顶紧块的一端压设在安装板上。
[0016]
在上述的不锈钢叶轮激光焊接系统中,所述顶紧块靠近旋转盘的一端表面呈弧形;所述安装板上还设有调节螺钉,所述调节螺钉表面凸出有一圈呈环形的调节凸檐,所述弹簧远离顶紧块的一端压设在调节凸檐上,转动调节螺钉可使调节螺钉沿轴心线方向移动。
[0017]
与现有的技术相比,本实用新型的优点在于:
[0018]
1、本实用新型的焊接头为激光焊接头,故可采用激光焊接的焊接方式,激光焊接焊缝美观,同时因为热量集中,焊接效率远高于气保焊,降低了焊接过程中产生的热量。
[0019]
2、本实用新型将叶轮安装在叶轮安装组件上,叶轮安装组件可带动叶轮发生翻转和旋转,从而方便焊接机器人对叶轮进行多角度焊接,实现了叶轮焊接的自动化,提高了生产效益。
附图说明
[0020]
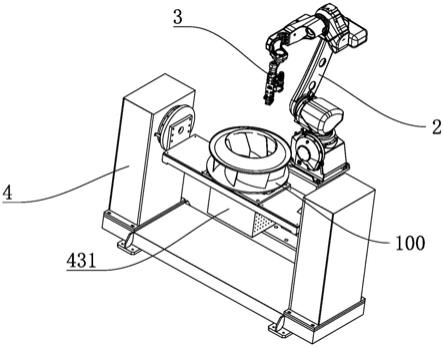
图1是本实用新型的结构示意图;
[0021]
图2是叶轮安装组件的结构示意图;
[0022]
图3是叶轮安装组件部分结构的结构示意图;
[0023]
图4是顶紧组件的结构示意图;
[0024]
图5是调节螺钉的结构示意图;
[0025]
图中:减重空腔1、焊接机器人2、焊接头3、叶轮安装组件 4、调节螺钉5、调节凸檐6、下底板7、框架8、面板9、底板41、翻转组件42、转动驱动组件43、安装盘44、叶轮100、翻转板 421、摆臂422、输出轴423、弯折部424、箱体431、旋转盘432、顶紧组件433、通风孔434、安装板435、导向块436、导向槽437、顶紧块438、弹簧439。
具体实施方式
[0026]
下面结合附图和具体实施方式对本实用新型做进一步详细的说明。
[0027]
如图1所示,一种不锈钢叶轮激光焊接系统,包括焊接机器人2,所述焊接机器人2的端部设有焊接头3,还包括用于安装叶轮100且可带动叶轮100发生翻转和旋转的叶轮安装组件4,所述叶轮安装组件4位于焊接机器人2的一侧,所述焊接头3为激光焊接头,焊接头
3一端固定连接在焊接机器人2上,另一端竖直向下延伸,移动焊接机器人2可使焊接头3位于叶轮安装组件 4的正上方。
[0028]
本实用新型,使用时,将待焊接的叶轮100安装至叶轮安装组件4上,焊接时,焊接机器人2带动焊接头3移动至叶轮100 正上方,以进行激光焊接。焊接过程中,安装组件4可带动叶轮 100发生翻转和转动,以方便焊接机器人2端部的焊接头3对叶轮100各个角度进行焊接。故本实用新型的焊接头3为激光焊接头,故可采用激光焊接的焊接方式,激光焊接焊缝美观,同时因为热量集中,焊接效率远高于气保焊,降低了焊接过程中产生的热量。
[0029]
结合图2和图3所示,所述叶轮安装组件4包括固定连接在安装平台上的底板41,所述底板41上设有翻转组件42,所述翻转组件42上连接有转动驱动组件43,所述转动驱动组件43的一端驱动连接有用于安装叶轮100的安装盘44。转动驱动组件43 实现对叶轮100驱动转动,翻转组件42带动叶轮100翻转。故本实用新型将叶轮100安装在叶轮安装组件4上,叶轮安装组件4 可带动叶轮100发生翻转和旋转,从而方便焊接机器人2对叶轮 100进行多角度焊接,实现了叶轮100焊接的自动化,提高了生产效益。
[0030]
具体的说,所述翻转组件42包括翻转板421,所述转动驱动组件43连接在翻转板421上,还包括至少一个固定连接在底板 41上的驱动翻转电机(图中未示出),所述翻转板421的一端通过摆臂422与驱动翻转电机的输出轴423驱动连接,所述摆臂422 一端固定连接在输出轴423上,另一端沿输出轴423的径向延伸并与翻转板421的端部相连。所述转动驱动组件43包括固定连接在翻转板421上的箱体431,所述箱体431内具有容纳空腔,驱动旋转电机(图中未示出)设置在容纳空腔内,驱动旋转电机驱动连接有旋转盘432。
[0031]
使用时,叶轮100固定设置在安装盘44上,驱动旋转电机驱动旋转盘432转动从而带动安装盘44和叶轮100旋转,设置在底板41上的驱动翻转电机通过输出轴423带动摆臂422摆动,从而使得翻转板421发生翻转,翻转板421带动叶轮100和转动驱动组件43整体发生翻转。
[0032]
优选地,所述驱动翻转电机设有两个且分别位于翻转板421 的两端外侧,两个驱动翻转电机分别通过两个摆臂422与翻转板 421的两端相连。对翻转板421两端同时施力使得翻转板421摆动过程更加稳定。
[0033]
如图3所示,所述摆臂422靠近翻转板421的一端设有弯折部424,所述弯折部424位于翻转板421下方且与翻转板421底面相贴合,所述弯折部424的延伸方向与翻转板421的延伸方向相平行。通过弯折部424与翻转板421相连接,可以增大连接面积,使得摆臂422驱动翻转板421更加稳定。
[0034]
优选地,所述翻转板421包括固定连接的下底板7、框架8 和面板9,所述下底板7、框架8和面板9围合形成减重空腔1,所述弯折部424固定连接在下底板7的底面上。这样可以减小翻转板421的总重量,减小驱动翻转电机驱动翻转板421需要的输出功率,降低能耗。
[0035]
如图3所示,所述箱体431上还设有镂空的通风孔434,所述通风孔434与容纳空腔相连通。通风孔434可增加散热效果,防止驱动电机温度过高。
[0036]
结合图3-5所示,所述安装盘44固定连接在旋转盘432上,所述旋转盘432的一侧还设有顶紧组件433,所述顶紧组件433 连接在翻转板421上且顶紧组件433的一端压设在旋转盘432侧面,所述顶紧组件433包括固定连接在旋转盘432上的安装板 435,所述安装板435上固定连接有两块相对设置的导向块436,所述导向块436内表面上设有向导向块436内
部凹陷的导向槽 437,顶紧块438滑动连接在导向槽437内,所述顶紧块438的一侧设有弹簧439,所述弹簧439远离顶紧块438的一端压设在安装板435上。顶紧块438顶紧在旋转盘432侧面,可以保证翻转板421翻转后,旋转盘432处于倾斜状态时仍能稳定转动。
[0037]
优选地,所述顶紧块438靠近旋转盘432的一端表面呈弧形。这样可以使得顶紧块438端部能更好的贴合在旋转盘432侧面。
[0038]
如图5所示,所述安装板435上还设有调节螺钉5,所述调节螺钉5表面凸出有一圈呈环形的调节凸檐6,所述弹簧439远离顶紧块438的一端压设在调节凸檐6上,转动调节螺钉5可使调节螺钉5沿轴心线方向移动。转动调节螺钉5可通过调节凸檐 6调节弹簧439的松紧程度,从而调节顶紧块438的顶紧力。
[0039]
本实用新型的工作原理是:叶轮100固定设置在安装盘44 上,焊接时,焊接机器人2带动焊接头3移动至叶轮100正上方,以进行激光焊接。焊接过程中,驱动旋转电机驱动旋转盘432转动从而带动安装盘44和叶轮100旋转,设置在底板41上的驱动翻转电机通过输出轴423带动摆臂422摆动,从而使得翻转板421 发生翻转,翻转板421带动叶轮100和转动驱动组件43整体发生翻转,以方便焊接机器人2端部的焊接头3对叶轮100各个角度进行焊接。故本实用新型的焊接头3为激光焊接头,故可采用激光焊接的焊接方式,激光焊接焊缝美观,同时因为热量集中,焊接效率远高于气保焊,降低了焊接过程中产生的热量。
[0040]
本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
[0041]
尽管本文较多地使用了减重空腔1、焊接机器人2、焊接头3、叶轮安装组件4、调节螺钉5、调节凸檐6、下底板7、框架8、面板9、底板41、翻转组件42、转动驱动组件43、安装盘44、叶轮100、翻转板421、摆臂422、输出轴423、弯折部424、箱体431、旋转盘432、顶紧组件433、通风孔434、安装板435、导向块436、导向槽437、顶紧块438、弹簧439等术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。