一种自动跟踪焊缝激光焊接机的制作方法
1.本实用新型涉及焊接装置技术领域,具体为一种自动跟踪焊缝激光焊接机。
背景技术:
2.激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法,激光焊接是激光材料加工技术应用的重要方面之一,20世纪70年代主要用于焊接薄壁材料和低速焊接,焊接过程属热传导型,即激光辐射加热工件表面,表面热量通过热传导向内部扩散,通过控制激光脉冲的宽度、能量、峰值功率和重复频率等参数,使工件熔化,形成特定的熔池。
3.经过海量的检索,发现现有技术中的焊接装置中典型的如公开号为:cn205184050u的一种新型激光焊接装置,包括激光焊接工控机、激光发生器、激光焊接半反射镜、激光焊接嗅嘴、激光焊接电荷传感器,所述激光焊接工控机与激光焊接机架相连,所述激光焊接工控机内有所述激光发生器,所述激光发生器下面有激光焊接电源,所述激光焊接发生器前面有所述激光焊接半反射镜,所述激光焊接半反射镜下面有所述激光焊接嗅嘴,所述激光焊接工作台内部有激光焊接背面光学传感器,但是在这项技术中,仍然存在一定的缺陷,无法对焊接缝进行跟踪,只能对规则型物体进行定向的焊接。
技术实现要素:
4.本实用新型的目的在于提供一种自动跟踪焊缝激光焊接机,以解决上述背景技术中提出的无法对焊接缝进行跟踪,只能对规则型物体进行定向的焊接的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种自动跟踪焊缝激光焊接机,包括焊接机台和焊接组件,
6.所述焊接机台包括控制面板、滑槽、电滑轨、焊接槽、电动液压杆和抵块,所述焊接机台的前端左上方设有控制面板,所述焊接机台的顶部两侧开设有滑槽,所述滑槽的底部设有电滑轨,所述焊接机台的顶部中间开设有焊接槽,所述焊接槽的左右两侧均安装有电动液压杆,所述电动液压杆的输出轴上固定安装有抵块;
7.所述焊接组件包括支撑架、顶架、滑动块、驱动带、气缸、激光焊接头和超声波传感器,所述焊接组件设置在焊接机台的顶部,所述顶架的底部两侧均设有支撑架,所述顶架的前端滑动安装有滑动块,所述滑动块的前端固定安装有气缸,所述顶架的上方设有驱动带,所述顶架的底部两侧安装有超声波传感器。
8.优选的,所述电滑轨的上方与支撑架的底部连接。
9.优选的,所述抵块包括伸缩腔、弹簧和伸缩块,所述抵块的内部开设有伸缩腔,所述伸缩腔的内部固定安装有弹簧,所述弹簧的顶部固定连接有伸缩块。
10.优选的,所述滑动块的左侧顶部与驱动带连接。
11.优选的,所述气缸的输出轴上固定安装有激光焊接头。
12.优选的,所述控制面板与电滑轨、电动液压杆、驱动带、气缸、激光焊接头和超声波
传感器电性连接。
13.与现有技术相比,本实用新型的有益效果是:该自动跟踪焊缝激光焊接机,
14.(1)设置有超声波传感器,超声波传感器对焊接槽内发射超声波,检测焊接件的位置以及需要焊接的焊接缝的位置,再将信号发送到控制面板,控制面板控制装置中的各个驱动组件,带动激光焊接头移动到指定的位置进行焊接,且焊接过程中持续发送信号,使得焊接过程自动化,提高焊接的效率;
15.(2)设置有抵块,抵块内部安装有弹簧,弹簧的端部连接有伸缩块,在固定焊接件的时候,通过电动液压杆带动抵块的移动,将焊接件夹持住,进而通过弹簧的作用,防止夹持时因压力过大而导致材料的变形,保护焊接件。
附图说明
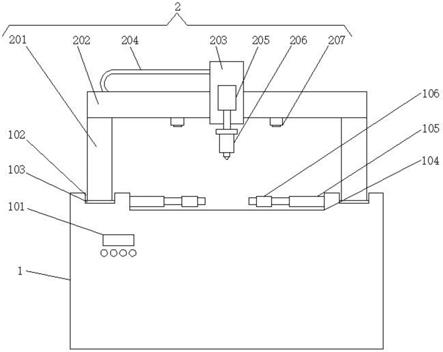
16.图1为本实用新型正视结构示意图;
17.图2为本实用新型抵块剖视结构示意图;
18.图3为本实用新型工作流程图。
19.图中:1、焊接机台,101、控制面板,102、滑槽,103、电滑轨,104、焊接槽,105、电动液压杆,106、抵块,1061、伸缩腔,1062、弹簧,1063、伸缩块,2、焊接组件,201、支撑架,202、顶架,203、滑动块,204、驱动带,205、气缸,206、激光焊接头,207、超声波传感器。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1
‑
3,本实用新型提供一种技术方案:一种自动跟踪焊缝激光焊接机,如图1和图2所示,焊接机台1包括控制面板101、滑槽102、电滑轨103、焊接槽104、电动液压杆105和抵块106,焊接机台1的前端左上方设有控制面板101,焊接机台1的顶部两侧开设有滑槽102,滑槽102的底部设有电滑轨103,电滑轨103的上方与支撑架201的底部连接,便于通过电滑轨103带动支撑架201和顶架202的前后移动,焊接机台1的顶部中间开设有焊接槽104,焊接槽104的左右两侧均安装有电动液压杆105,电动液压杆105的输出轴上固定安装有抵块106,抵块106包括伸缩腔1061、弹簧1062和伸缩块1063,抵块106的内部开设有伸缩腔1061,伸缩腔1061的内部固定安装有弹簧1062,弹簧1062的顶部固定连接有伸缩块1063,有利于防止焊接件在夹持的过程中产生形变。
22.如图1和图3所示,焊接组件2包括支撑架201、顶架202、滑动块203、驱动带204、气缸205、激光焊接头206和超声波传感器207,焊接组件2设置在焊接机台1的顶部,顶架202的底部两侧均设有支撑架201,顶架202的前端滑动安装有滑动块203,滑动块203的左侧顶部与驱动带204连接,便于通过驱动带204带动滑动块203得到左右移动,滑动块203的前端固定安装有气缸205,气缸205的输出轴上固定安装有激光焊接头206,有利于焊接的过程进行,顶架202的上方设有驱动带204,顶架202的底部两侧安装有超声波传感器207,控制面板101与电滑轨103、电动液压杆105、驱动带204、气缸205、激光焊接头206和超声波传感器207
电性连接,便于通过控制面板101控制装置内的电性设备的启动以及信号的处理。
23.工作原理:超声波传感器207的型号是tcrt16
‑
40,在使用该自动跟踪焊缝激光焊接机时,首先收缩电动液压杆105,再将两块需要焊接的加工件放置到焊接槽104内,然后启动电动液压杆105带动抵块106相互靠近,将加工件相互抵住,在挤压的过程中伸缩块1063与加工件接触,并挤压弹簧1062,避免加工件被夹坏,夹持完毕后,通过两个超声波传感器207发出超声波,检测焊接缝的位置,再将信号发送到控制面板101,控制面板101启动电滑轨103、驱动带204和气缸205,电滑轨103带动激光焊接头206前后移动,驱动204带动激光焊接头206左右移动,气缸205带动激光焊接头206上下移动,且焊接过程中超声波传感器207持续检测焊接缝的位置,使得焊接过程自动化,本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
24.术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本实用新型的简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本实用新型保护内容的限制。
25.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1