一种触点焊接装置的制作方法
1.本实用新型属于焊接装置技术领域,特别是涉及一种触点焊接装置。
背景技术:
2.触点焊接主要包括触点切割及触点与基带的焊接工序。现有的触点焊接装置,如申请号cn202010332806.6公开的一种模内冲焊的点焊机头,其包括上电极、下电极、动力机构和上切刀,动力机构驱动上切刀向上运动,以剪切穿入上电极的线材段,动力机构驱动上电极相对下电极向下直线运动,使得上电极向下冲压来使线材段接触下电极上的带材,从而在上电极和下电极通电后,能使线材段与带材熔融完成焊接。然而,该点焊机头在焊接过程中动力机构仅驱动上电极向下运动,不能同时驱动下电极向上运动,所以,在焊接时,上电极的运行行程大,这会增加焊接时间,降低焊接效率,并影响焊接质量。
技术实现要素:
3.本实用新型的目的是针对现有技术的不足,提供一种焊接效率更高、焊接稳定性和焊接质量更好的触点焊接装置,该触点焊接装置特别适用于小规格触点焊接。
4.基于此,本实用新型公开了一种触点焊接装置,包括机架、安装于机架的上电极座、下电极座、切刀机构和动力机构;所述上电极座与下电极座之间形成供外部的基带与触点焊接的空间,所述切刀机构设于焊接空间的侧边;所述动力机构包括凸轮、第一连杆、第二连杆及剪切杆;所述剪切杆连接切刀机构和凸轮,凸轮转动以带动剪切杆移动进而带动切刀机构剪切触点带上的触点,所述凸轮还连接第一连杆和第二连杆,第一连杆和第二连杆分别连接上电极座和下电极座,凸轮转动带动第一连杆和第二连杆摆动,以使第一连杆和第二连杆分别带动上电极座和下电极座进行相向运动,以实现基带与触点的焊接。
5.优选地,所述第一连杆的固定端与机架铰接,第一连杆的中部与凸轮的前侧面滑动连接,且第一连杆的摆动端与上电极座铰接。
6.进一步优选地,所述上电极座设有可上下移动地安装于机架的线性滑轨,且线性滑轨通过拉杆与第一连杆的摆动端铰接。
7.优选地,所述下电极座的底部通过弹性件与机架弹性铰接,所述第二连杆的滑动端与凸轮的后侧面滑动连接,第二连杆的中部为第二连杆的转动支点,且第二连杆的摆动端可转动连接于所述下电极座。
8.进一步优选地,所述动力机构还包括第三连杆,第三连杆和第二连杆对称设于弹性件的两侧,第三连杆的固定端与第二连杆的中部通过支杆固定,且第三连杆和第二连杆都以支杆作为转动支点。
9.优选地,所述凸轮包括前后对称分布且同轴转动的前凸轮和后凸轮,所述第一连杆设置有第一凸点,第一凸点滑动插入设置于所述前凸轮的外侧面的第一环形凸轮凹槽的上边,所述第二连杆设置有第二凸点,第二凸点滑动插入设置于所述后凸轮的外侧面的第二环形凸轮凹槽的下边。
10.进一步优选地,所述剪切杆的滑动端设有第三凸点,第三凸点滑动插入设置于所述前凸轮或后凸轮的内侧面的第三环形凸轮凹槽,剪切杆的移动端与切刀机构弹性铰接,前凸轮或后凸轮转动以带动剪切杆的移动端移动进而带动切刀机构向凸轮侧的斜下方来回摆动以实现触点带上的触点剪切。
11.更进一步优选地,所述前凸轮与后凸轮之间通过转轴连接,剪切杆设有连接头,所述连接头的外端部设有u形卡槽,转轴滑动卡入所述u形卡槽,所述连接头的中部设有所述第三凸点,连接头的内端部与所述剪切杆固定。
12.优选地,所述切刀机构包括刀座和设于刀座顶部的刀片,所述刀座底部弹性铰接于机架,且剪切杆的移动端与刀座的中部弹性铰接。
13.优选地,所述下电极座的顶部设有放置剪切后的触点的凹槽体。
14.与现有技术相比,本实用新型至少包括以下有益效果:
15.本实用新型的触点焊接装置通过凸轮与剪切杆、第一连杆及第二连杆的协同配合,不仅能使转动的凸轮带动剪切杆移动来带动切刀机构剪切触点带上的触点,同时还能使转动的凸轮带动第一连杆和第二连杆摆动,以使第一连杆和第二连杆分别带动上电极座和下电极座进行相向运动来实现基带与触点的焊接;也即,该触点焊接装置的动力机构能带动切刀机构完成触点剪切,并能带动上电极座和下电极座相向运动来焊接基带与触点,这样,在焊接时上电极座和下电极座相向运动,能减少单独的上电极座或下电极座运动的运动行程,能缩短焊接时间,大大提高焊接效率,并能避免因单独的上电极座或下电极座运动行程大而导致上电极座或下电极座的运动稳定性差,进而能提高焊接稳定性和焊接质量。
附图说明
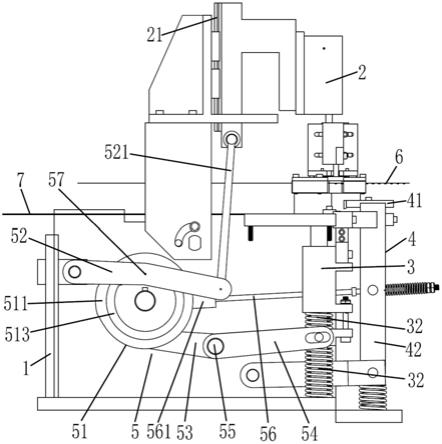
16.图1是本实施例的一种触点焊接装置的正视图。
17.图2是本实施例的一种触点焊接装置的立体结构示意图。
18.图3是图2中标号a的局部放大图。
19.图4是本实施例的一种触点焊接装置的后视图。
20.附图标号说明:1机架;2上电极座;21线性滑轨;3下电极座;31凹槽体;32弹性件;4切刀机构;41刀片;42刀座;5动力机构;51凸轮;511前凸轮;512后凸轮;513第一环形凸轮凹槽,514第二环形凸轮凹槽;515转轴;52第一连杆;521拉杆;53第二连杆;54第三连杆;55支杆;56剪切杆;561连接头;57第一凸点;58第二凸点;6基带;7触点带;71触点。
具体实施方式
21.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本实用新型作进一步详细的说明。
22.本实施例的一种触点焊接装置,参照图1-3,包括机架1、安装于机架1的上电极座2、下电极座3、切刀机构4和动力机构5;外部的焊接电源设备的正极和负极分别连接上电极座2和下电极座3,以使上电极座2和下电极座3通电;其中,外部的基带6放置于上电极座2,触点71由外部的触点带7提供并放置于下电极座3(参照图2-3),上电极座2与下电极座3之间形成供外部的基带6与触点71焊接的空间,切刀机构4设于焊接空间的侧边,且触点带7放
置于切刀机构4的下方,动力机构5连接并带动上电极座2、下电极座3和切刀机构4工作。
23.焊接时,将基带6放置于上电极座2,动力机构5带动切刀机构4剪切触点带7,以得到放置于下电极座3的触点71;然后,动力机构5带动上电极座2向下运动,且动力机构5同步带动下电极座3向上运动,以使上电极座2和下电极座3进行相向运动,此时,焊接电源设备的正极和负极分别经上电极座2和下电极座3连通在基带6和触点71处的电阻生产热量,使基带6和触点71融化进行焊接。
24.该触点焊接装置的动力机构5能带动切刀机构4完成触点71剪切,并能带动上电极座2和下电极座3同步进行相向运动来焊接基带6与触点71;这样,在焊接时上电极座2和下电极座3同步进行相向运动,能减少单独的上电极座2或下电极座3运动的运动行程,能缩短焊接时间,大大提高焊接效率,并能避免因单独的上电极座2或下电极座3运动行程大而导致上电极座2或下电极座3的运动稳定性差,进而能提高焊接稳定性和焊接质量。以下对该触点焊接装置实现剪切触点带7、上电极座2向上运动和下电极座3向下运动的具体结构分别进行描述:
25.参照图1-2,动力机构5包括凸轮51和剪切杆56,凸轮51包括前后对称分布且同轴转动的前凸轮511和后凸轮512,前凸轮511与后凸轮512之间固定连接有用于同轴转动的转轴515;切刀机构4包括刀座42和设于刀座42顶部的刀片41,刀座42底部弹性铰接于机架1,且刀座42的中部与剪切杆56的移动端弹性铰接,而剪切杆56的滑动端设有连接头561,连接头561的中部设有第三凸点,第三凸点滑动插入设于前凸轮511或后凸轮512的朝里侧面的第三环形凸轮凹槽,前凸轮511或后凸轮512转动以带动第三凸点在第三环形凸轮凹槽内滑动,连接头561的外端部设有u形卡槽,u形卡槽的开口朝向转轴515,转轴515滑动卡入u形卡槽内,连接头561的内端部与剪切杆56固定。当凸轮51转动时,通过连接头561拉动剪切杆56左右往复移动,进而带动刀座42摆动实现刀片41对触点带7的切割,以获得触点71。
26.工作时,凸轮51转动通过连接头561带动剪切杆56的左右往复移动,进而带动刀座42及刀片41向凸轮51侧的斜下方进行往返摆动,以使刀片41沿斜下方剪切触点带7来获得触点71,而在获得触点71后,当凸轮51转动至第三凸点位于第三环形凸轮凹槽的凸环部时,刀片41在刀座42底部和剪切杆56的弹性铰接结构的弹性回复力的协同作用下,能快速返回至原始位置;凸轮51的转轴515能对连接头561的u形卡槽起到限定和支撑作用,凸轮51转动时,连接头561的u形卡槽能够以转轴515为支撑轴沿转轴515进行左右往复移动,且在移动过程中u形卡槽与转轴515不发生脱离;而且,在刀片41倾斜向下进行剪切时,刀座42及刀片41自身的重力也能协助刀片41剪切触点带7,使触点带7的剪切更好方便、快捷。剪切杆56优选为沿凸轮51侧(即图1的左侧)向下倾斜设置,以带动刀座42及刀片41向凸轮51侧的斜下方进行往返摆动。
27.参照图1,动力机构5还包括第一连杆52,第一连杆52的固定端与机架1铰接,第一连杆52的中部设有第一凸点57,第一凸点57滑动插入设于前凸轮511的外侧面的第一环形凸轮凹槽513;上电极座2设有可上下移动地安装于机架1的线性滑轨21,且线性滑轨21通过拉杆521与第一连杆52的摆动端铰接。
28.工作时,如图1所示,凸轮51转动,使得第一凸点57在第一环形凸轮凹槽513内滑动,从而带动第一连杆52上下摆动,从而带动拉杆521及线性滑轨21一同进行上下移动,进而使线性滑轨21带动上电极座2进行上下移动以实现焊接;通过线性滑轨21带动上电极座2
进行上下移动,能保证上下直线运动的顺畅。
29.参照图1-2和4,动力机构5还包括第二连杆53和第三连杆54;第二连杆53的滑动端设有第二凸点58,第二凸点58滑动插入设置于后凸轮512外侧面的第二环形凸轮凹槽514内,下电极座3的底部通过弹性件32与机架1弹性连接,第三连杆54和第二连杆53对称设于弹性件32的两侧,以使第三连杆54和第二连杆53的摆动端可转动连接于下电极座3,第三连杆54的固定端与第二连杆53的中部分别转动固定于支杆55的两端,支杆55作为第二连杆53摆动的支点。
30.工作时,后凸轮512和前凸轮511进行同轴转动,以带动第二凸点58在第二环形凸轮凹槽514内滑动,使得第二连杆53和第三连杆54以支杆55为支点进行上下摆动,进而带动下电极座3进行上下移动以实现焊接;通过弹性件32的回复力以实现其在焊接前对下电极座3的预压,提高焊接的稳定性和焊接质量。
31.第一连杆52的第一凸点57插入前凸轮511外侧面的第一环形凸轮凹槽513的上部,第二连杆53的第二凸点58插入后凸轮512的外侧面的第二环形凸轮凹槽514的下部,连接头561位于前凸轮511与后凸轮512之间,且连接头561上的第三凸点插入位于前凸轮511或后凸轮512的内侧面的第三环形凸轮凹槽的右侧中部(以图1的方位为准),因此,第一连杆52、第二连杆53和剪切杆56的运动互不干扰,且结构紧凑、布局合理,故而左右移动的剪切杆56能带动刀座42及刀片41向凸轮51侧的斜下方来回摆动来使刀片41完成触点71剪切,然后,上下摆动的第一连杆52和第二连杆53分别带动上电极座2和下电极座3同步进行相向运动来实现基带6与触点71的焊接。第三凸点的结构与第一凸点57及第二凸点58相似,且第三环形凸轮凹槽的结构与第一环形凸轮凹槽513及第二环形凸轮凹槽514相似。
32.参照图3,下电极座3的顶部设有放置剪切后的触点71的凹槽体31,触点71完成剪切后即进入凹槽体31,以防触点71在焊接前脱离下电极座3。
33.尽管已描述了本实用新型实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本实用新型实施例范围的所有变更和修改。
34.以上对本实用新型所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1