一种电容焊接装置的制作方法
1.本实用新型贴片钽电容器生产设备技术领域,尤其是一种电容焊接装置。
背景技术:
2.贴片钽电容是一种技术先进、性能优良的电容器产品。它所具备的高频低阻抗性具有普通电容器所无法比拟的优越性,被广泛使用在平板电脑、智能手机、平板显示器等电子产品上。电容器的性能取决于其所有生产工序的工艺合格与否,在生产过程中将电容器进行稳定可靠的焊接,是电容生产的重要步骤。
技术实现要素:
3.针对现有技术中存在的不足,本实用新型提供一种电容焊接装置,能将贴片钽电容在更高速、更稳定、更可靠、可调节的状态下,焊接电容产品,使电容产品焊接质量更稳定,提高成品率和生产率。本实用新型采用的技术方案是:
4.一种电容焊接装置,包括伺服驱动机构、压力调节机构、重量平衡机构和焊轮;
5.所述焊轮依次通过交叉滚子滑座和垫块与所述伺服驱动机构连接,以便于所述伺服驱动机构驱动所述垫块以及连接于所述垫块上的部件沿直线运动;
6.所述压力调节机构连接于所述垫块与所述交叉滚子滑座之间,用于推动所述焊轮沿直线运动;
7.所述重量平衡机构连接于所述伺服驱动机构和所述垫块之间,能够在所述伺服驱动机构的直线运动中减轻其负载。
8.进一步地,所述伺服驱动机构包括伺服电机和单轴机器人,所述垫块连接于所述单轴机器人上,在所述伺服电机的驱动下由所述单轴机器人驱动所述垫块沿直线运动。
9.更进一步地,所述交叉滚子滑座安装于所述垫块上;所述焊轮通过焊臂和焊臂连板连接于所述交叉滚子滑座上,由压力调节机构带动所述焊轮在所述交叉滚子滑座上滑动;
10.所述压力调节机构包括螺套、拉杆、手旋螺钉和焊轮弹簧,所述焊轮弹簧沿轴线设置于所述螺套中,所述手旋螺钉从所述螺套一端插入,与所述焊轮弹簧接触,所述拉杆从所述螺套另一端插入,与所述焊轮弹簧接触。
11.更进一步地,所述螺套靠近所述手旋螺钉端连接有调节螺母与所述手旋螺钉螺纹连接。
12.更进一步地,所述螺套靠近所述拉杆端连接有挡片。
13.更进一步地,所述螺套通过第一固定座与所述垫块固定连接;所述拉杆通过第二固定座与所述焊臂连板固定连接。
14.更进一步地,所述拉杆与所述第二固定座之间设有压力传感器。
15.进一步地,所述重量平衡机构包括支架和至少一个拉簧,所述支架安装于所述伺服驱动机构上,所述拉簧一端与所述支架连接,另一端与所述垫块连接。
16.更进一步地,所述拉簧设置有两组,分别布设于所述伺服驱动机构两侧。
17.本实用新型的优点在于:
18.1)该电容焊接装置通过伺服驱动机构精准地控制移动位置以及位置停留的时间,确保电容产品能在需要的时间焊接,以及持续焊接的时间控制。运动的位置,运动的时间,停顿的时间都可调节,保证了电容产品焊接的质量。
19.2)该电容焊接装置通过压力调节机构能够调节并实时监测焊轮焊接过程中的压力,提高电容产品的焊接质量。
20.3)该电容焊接装置重量平衡机构能够平衡掉焊轮及其相关组件的重量,减轻伺服驱动机构的负载,使动作平稳快速,提高产品的生产率。
附图说明
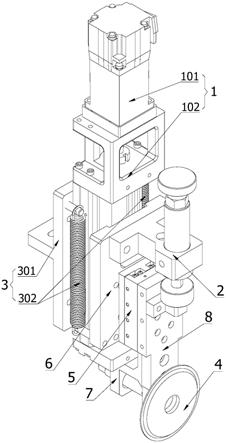
21.图1为本实用新型实施例中的一种电容焊接装置的结构示意图。
22.图2为本实用新型实施例中的一种电容焊接装置的侧视图。
23.图3为本实用新型实施例中的一种电容焊接装置压力调节机构的剖视图。
具体实施方式
24.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
25.如图1和图2所示,本实用新型实施例提出的一种电容焊接装置,包括伺服驱动机构1、压力调节机构2、重量平衡机构3和焊轮4;所述焊轮4依次通过交叉滚子滑座5和垫块6与所述伺服驱动机构1连接,以便于所述伺服驱动机构1驱动所述垫块6以及连接于所述垫块6上的部件沿直线运动;所述压力调节机构2连接于所述垫块6与所述交叉滚子滑座5之间,用于推动所述焊轮4沿直线运动;所述重量平衡机构3连接于所述伺服驱动机构1和所述垫块6之间,能够在所述伺服驱动机构1的直线运动中减轻其负载。
26.具体的,所述伺服驱动机构1包括伺服电机101和单轴机器人102(单轴机器人又被叫做滚珠丝杆型直线滑台,主要由:滚珠丝杆、直线导轨、铝合金型材、滚珠丝杆支撑座、联轴器等组成;其中滚珠丝杆是将回转运动转化为直线运动,或将直线运动转化为回转运动的理想的产品。滚珠丝杠由螺杆、螺母和滚珠组成。它的功能是将旋转运动转化成直线运动;由于其具有很小的摩擦阻力,滚珠丝杠被广泛应用于各种工业设备和精密仪器。可在高负载的情况下实现高精度的直线运动。通过伺服电机驱动所述滚珠丝杆转动,从而带动直线导轨及其连接件沿直线运动),所述垫块6连接于所述单轴机器人102上,在所述伺服电机101的驱动下由所述单轴机器人102驱动所述垫块6沿直线运动;所述交叉滚子滑座5安装于所述垫块6上;所述焊轮4通过焊臂7和焊臂连板8连接于所述交叉滚子滑座5上,由压力调节机构2带动所述焊轮4在所述交叉滚子滑座5上滑动。该电容焊接装置通过伺服驱动机构精准地控制移动位置以及位置停留的时间,确保电容产品能在需要的时间焊接,以及持续焊接的时间控制。运动的位置,运动的时间,停顿的时间都可调节,保证了电容产品焊接的质量。
27.具体的,如图1和图3所示,所述压力调节机构2包括螺套201、拉杆202、手旋螺钉
203和焊轮弹簧204,所述焊轮弹簧204沿轴线设置于所述螺套201中,所述手旋螺钉203从所述螺套201一端插入,与所述焊轮弹簧204接触,所述拉杆202从所述螺套201另一端插入,与所述焊轮弹簧204接触;所述螺套201靠近所述手旋螺钉203端连接有调节螺母205,所述调节螺母205与所述手旋螺钉203螺纹连接,通过旋拧调节所述手旋螺钉203插入所述螺套201的长度,从而调节所述焊轮弹簧204的预紧力,从而调节与其连接的所述焊轮4的焊接压力;所述螺套201靠近所述拉杆202端连接有挡片206,用于放置所述拉杆202端部从所述螺套201中脱落,保证所述拉杆202既能够在所述螺套201中沿轴线滑动,又能够防止其从所述螺套201中脱落。
28.进一步的,所述螺套201通过第一固定座207与所述垫块6固定连接;所述拉杆202通过第二固定座208与所述焊臂连板8固定连接;所述拉杆202与所述第二固定座208之间设有压力传感器209,能够实时监测所述压力调节机构2作用于所述焊臂连板8上的压力,从而提高电容产品的焊接质量。
29.具体的,所述重量平衡机构3包括支架301和至少一个拉簧302,所述支架301安装于所述伺服驱动机构1上,所述拉簧302一端与所述支架301连接,另一端与所述垫块6连接;所述拉簧302设置有两组,分别布设于所述伺服驱动机构1两侧,能够平衡掉所述焊轮4及其相关组件的重量,减轻伺服驱动机构的负载,使动作平稳快速,提高产品的生产率。
30.最后所应说明的是,以上具体实施方式仅用以说明本实用新型的技术方案而非限制,尽管参照实例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1