一种无尾料的全自动切管机的制作方法
1.本实用新型涉及切管机相关领域,具体是一种无尾料的全自动切管机。
背景技术:
2.全自动切管机的原理是通过气推油式的互相配合,由电器系统控制气压系统的运动方向,推动油路作直线往返运动,在往返运动中,从拖板限位所检测到的信号作依据,控制和改变气、油路运动,从而达到预期的走刀路线;受限于切割头与卡盘本身的的尺寸结构,切割头无法无限逼近后卡盘,因此导致切割头与后卡盘卡爪之间存在一定物理距离,此距离部分的管材无法被切割加工,称之为管材切割的尾料长度。
3.现有装置采用多个卡盘夹取管道,但是因激光切割头需要在各卡盘之间移动,动作繁琐,降低了切割效率,通过牺牲时间而降低尾料损耗,且自动上料效率低;现有装置由于多数采用气动或者液压夹紧,从而使现有的移动卡盘在移动推动管道时,需要通过泄压先对管道进行松开动作,移动至所需位置后,需要重新增压对管道进行夹紧动作,步骤繁杂。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种无尾料的全自动切管机。
5.本实用新型是这样实现的,构造一种无尾料的全自动切管机,该装置包括传送床身、支撑脚、导轨、线性滑座、安装板、行走电机、移动拖链、夹紧机构、固定卡盘、旋定机构、激光切割部件、材料管、单片机控制器和电线,所述传送床身底部与支撑脚螺栓连接,所述传送床身顶部前后两侧均设有导轨,所述导轨内轨与线性滑座滑动连接,所述线性滑座顶部与安装板螺栓连接,所述安装板顶部前侧与行走电机螺栓连接,所述行走电机轴动端通过连杆与移动拖链转动连接,所述移动拖链与传送床身前端面通槽滑动连接,所述安装板顶部与固定卡盘螺栓连接,所述传送床身后中侧凸块与激光切割部件螺栓连接,所述固定卡盘内环侧与材料管相接触,所述传送床身左端与单片机控制器螺栓连接,所述单片机控制器后端与电线固定连接,所述行走电机、激光切割部件和电线均与单片机控制器电连接,所述夹紧机构设于安装板顶部,所述夹紧机构包括支撑座、卡盘主体、气槽、快速接气口、活塞块、转动盘、限位槽、移动杆、移动板、电磁环、滚珠和红外传感器,所述安装板顶部中侧与支撑座螺栓连接,所述支撑座顶部与卡盘主体焊接,所述卡盘主体内环侧设有气槽,所述卡盘主体顶部与快速接气口螺栓连接,所述气槽与快速接气口管道连接,所述气槽内槽壁与活塞块滑动连接,所述活塞块左端与转动盘螺栓连接,所述转动盘外侧面与气槽内槽壁转动连接,所述转动盘左右两侧的盘身均设有限位槽,所述限位槽内槽壁与移动杆滑动连接,所述移动杆左端与移动板焊接,所述移动板与转动盘内槽壁滑动连接,所述移动板内槽壁与电磁环螺栓连接,所述电磁环内环侧与滚珠相接触,所述移动板内环壁与滚珠滚动连接,所述滚珠与材料管外管壁相接触,所述卡盘主体内环壁顶部的左右两侧均设有红外传感器,所述电磁环和红外传感器均与单片机控制器电连接,所述旋定机构设于固定卡盘内部。
6.优选的,所述旋定机构包括固定板、伺服电机、主动齿轮、从动齿盘和气动卡爪,所述安装板顶部后侧与固定板螺栓连接,所述固定板右端与伺服电机螺栓连接,所述伺服电机轴动端与主动齿轮同轴转动,所述主动齿轮与从动齿盘啮合,所述从动齿盘与固定卡盘内壁转动连接,所述从动齿盘盘身四周均设有气动卡爪,所述伺服电机和气动卡爪均与单片机控制器电连接。
7.优选的,所述气槽呈180
°
到90
°
的四分之三圆弧,且气槽内槽壁与转动盘接触台阶处设有橡胶垫圈。
8.优选的,所述转动盘内侧共设有四组移动杆和移动板,且四组移动板的外侧弧度与限位槽的弧度相同。
9.优选的,所述电磁环与移动板内环壁呈平行关系,且移动板内环壁共设有六组滚珠,六组滚珠呈两排自上而下等距分布。
10.优选的,所述从动齿盘圆心处设有直径为30cm的通孔,且该通孔四周共设有四组气动卡爪。
11.优选的,所述移动板材质为材料钢。
12.优选的,所述主动齿轮材质为高碳钢。
13.本实用新型具有如下优点:本实用新型通过改进在此提供一种无尾料的全自动切管机,与同类型设备相比,具有如下改进:
14.本实用新型所述一种无尾料的全自动切管机,通过设置了夹紧机构在安装板顶部,设置气槽和快速接气口,有利于快速接通高压气作为动力进行夹紧动作,设置限位槽和移动杆,有利于带动移动板进行夹紧工作,设置电磁环和滚珠,有利于灵活控制滚珠的滚动,从而控制对材料管的位移和旋转工作。
15.本实用新型所述一种无尾料的全自动切管机,通过设置了旋定机构在固定卡盘内部,设置主动齿轮和从动齿盘,有利于通过齿轮传动配合激光切割部件的切割工作,设置气动卡爪,有利于夹紧材料管配合切割工作。
附图说明
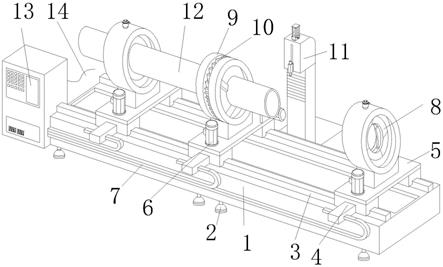
16.图1是本实用新型结构示意图;
17.图2是本实用新型的夹紧机构结构示意图;
18.图3是本实用新型的夹紧机构右视结构示意图;
19.图4是本实用新型的旋定机构右视结构示意图。
20.其中:传送床身-1、支撑脚-2、导轨-3、线性滑座-4、安装板-5、行走电机-6、移动拖链-7、夹紧机构-8、固定卡盘-9、旋定机构-10、激光切割部件-11、材料管-12、单片机控制器-13、电线-14、支撑座-81、卡盘主体-82、气槽-83、快速接气口-84、活塞块-85、转动盘-86、限位槽-87、移动杆-88、移动板-89、电磁环-810、滚珠-811、红外传感器-812、固定板-101、伺服电机-102、主动齿轮-103、从动齿盘-104、气动卡爪-105。
具体实施方式
21.下面将结合附图1-4对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不
是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1,本实用新型的一种无尾料的全自动切管机,包括传送床身1、支撑脚2、导轨3、线性滑座4、安装板5、行走电机6、移动拖链7、夹紧机构8、固定卡盘9、旋定机构10、激光切割部件11、材料管12、单片机控制器13和电线14,传送床身1底部与支撑脚2螺栓连接,传送床身1顶部前后两侧均设有导轨3,导轨3内轨与线性滑座4滑动连接,线性滑座4顶部与安装板5螺栓连接,安装板5顶部前侧与行走电机6螺栓连接,行走电机6轴动端通过连杆与移动拖链7转动连接,移动拖链7与传送床身1前端面通槽滑动连接,安装板5顶部与固定卡盘9螺栓连接,传送床身1后中侧凸块与激光切割部件11螺栓连接,固定卡盘9内环侧与材料管12相接触,传送床身1左端与单片机控制器13螺栓连接,单片机控制器13后端与电线14固定连接,行走电机6、激光切割部件11和电线14均与单片机控制器13电连接。
23.请参阅图2和图3,本实用新型的一种无尾料的全自动切管机,夹紧机构8设于安装板5顶部,提高对材料管12的夹紧和带动效果,夹紧机构8包括支撑座81、卡盘主体82、气槽83、快速接气口84、活塞块85、转动盘86、限位槽87、移动杆88、移动板89、电磁环810、滚珠811和红外传感器812,安装板5顶部中侧与支撑座81螺栓连接,提高对支撑座81的固定效果,支撑座81顶部与卡盘主体82焊接,提高对卡盘主体82额固定效果,卡盘主体82内环侧设有气槽83,为转动盘86转动提供位置和通过气流推动转动盘86提供空间,卡盘主体82顶部与快速接气口84螺栓连接,提高对快速接气口84的固定效果,气槽83与快速接气口84管道连接,提高气流流动的连贯性,气槽83内槽壁与活塞块85滑动连接,为活塞块85移动提供限位路径,活塞块85左端与转动盘86螺栓连接,提高活塞块85对转动盘86的带动效果,转动盘86外侧面与气槽83内槽壁转动连接,提高转动盘86转动时的稳定性,转动盘86左右两侧的盘身均设有限位槽87,为移动杆88的移动提供空间,限位槽87内槽壁与移动杆88滑动连接,提高移动杆88移动时的稳定性,移动杆88左端与移动板89焊接,提高对移动板89的固定效果,移动板89与转动盘86内槽壁滑动连接,提高移动板89移动时的稳定性,移动板89内槽壁与电磁环810螺栓连接,提高对电磁环810的固定效果,电磁环810内环侧与滚珠811相接触,提高电磁环810对滚珠811的吸附效果,移动板89内环壁与滚珠811滚动连接,为滚珠811的转动提供限位条件,滚珠811与材料管12外管壁相接触,提高滚珠811的夹紧效果,卡盘主体82内环壁顶部的左右两侧均设有红外传感器812,提高对材料管12的移动进行监测,电磁环810和红外传感器812均与单片机控制器13电连接,旋定机构10设于固定卡盘9内部,提高对材料管12的带动辅助效果,气槽83呈180
°
到90
°
的四分之三圆弧,且气槽83内槽壁与转动盘86接触台阶处设有橡胶垫圈,有利于提高气槽83和转动盘86之间的气密性,转动盘86内侧共设有四组移动杆88和移动板89,且四组移动板89的外侧弧度与限位槽87的弧度相同,有利于提高移动杆88和限位槽87对移动板89的带动效果,电磁环810与移动板89内环壁呈平行关系,且移动板89内环壁共设有六组滚珠811,六组滚珠811呈两排自上而下等距分布,有利于提高滚珠811对材料管12的带动和夹紧效果。
24.请参阅图4,本实用新型的一种无尾料的全自动切管机,旋定机构10包括固定板101、伺服电机102、主动齿轮103、从动齿盘104和气动卡爪105,安装板5顶部后侧与固定板101螺栓连接,提高对固定板101的固定效果,固定板101右端与伺服电机102螺栓连接,提高对伺服电机102的固定效果,伺服电机102轴动端与主动齿轮103同轴转动,为主动齿轮103
的转动提供动力,主动齿轮103与从动齿盘104啮合,提高主动齿轮103对从动齿盘104的带动效果,从动齿盘104与固定卡盘9内壁转动连接,提高从动齿盘104转动时的稳定性,从动齿盘104盘身四周均设有气动卡爪105,提高气动卡爪105的夹紧效果,伺服电机102和气动卡爪105均与单片机控制器13电连接,从动齿盘104圆心处设有直径为30cm的通孔,且该通孔四周共设有四组气动卡爪105,有利于提高对材料管12的夹紧效果。
25.本实用新型通过改进提供一种无尾料的全自动切管机,其工作原理如下;
26.第一,使用本设备时,首先将本设备放置在工作区域中,然后将装置与外部电源相连接,即可为本设备提供工作所需的电源;
27.第二,工作人员先通过外部计算机对单片机控制器13进行编程工作,然后检查本装置的各部件正常使用情况,将外部高压气管与快速接气口84进行相连接,在进行材料管12切割工作时,工作人员先将材料管12通过导轨3内轨上左侧的转动盘86中心通孔中,此时红外传感器812感应到其下方管道经过时进行长度测量和记录工作,然后通过单片机控制器13控制导轨3背柜上左侧的卡盘主体82顶部快速接气口84相连接的的气管进行灌气工作,气流通过快速接气口84进入气槽83内部,通过气压挤压转动盘86后侧的活塞块85进行移动,当活塞块85在气槽83内槽进行滑动时,活塞块85带动转动盘86进行转动,同时因转动盘86外侧与气槽83的紧密配合,从而使转动盘86受活塞块85转动时,气槽83内部的气压不出现泄露等现象,间接保证对转动盘86的推动力,当转动盘86转动时,通过转动盘86内部所设的限位槽87带动移动杆88进行滑动,从而使移动杆88带动移动板89进行向心运动或者分离运动,从而使移动板89夹紧材料管12,当移动板89夹紧材料管12时,移动板89内环侧的滚珠811与材料管12的外侧面相接触,此时电磁环810通电工作吸附住滚珠811,有利于提高在夹紧材料管12的同时能控制和辅助材料管12的水平移动效果,从而提高对材料管12的切割效果;
28.第三,然后通过单片机控制器13控制行走电机6通过移动拖链7带动线性滑座4在导轨3内轨上向右侧移动,使线性滑座4带动安装板5和卡盘主体82以及材料管12向固定卡盘9方向移动,并且使材料管12进入固定卡盘9圆心处,通过单片机控制器13控制对气动卡爪105进行驱动,使气动卡爪105夹紧材料管12,然后通过单片机控制器13控制对电磁环810进行停电工作,使电磁环810失去磁性停止吸附滚珠811,此时移动板86和滚珠811仍然夹紧材料管12,但是滚珠811可滚动带动材料管12进行水平方向的移动以及圆周转动,然后行走电机6带动安装板5和支撑座81在导轨3内轨上向左侧移动所要切割的管道长度距离,通过红外传感器812对移动距离进行辅助监测,此时由于滚珠811在材料管12外侧面滚动,并且材料管12受气动卡爪105的夹紧作用,材料管12的位置没有发生变化,然后通过单片机控制器13控制对电磁环810进行通电,电磁环810吸附住滚珠811后,通过行走电机6的带动使卡盘主体82带动材料管12向右侧移动所切割距离,此时控制气动卡爪105进行松懈,使材料管12能在从动齿盘104圆心处滑动移动;
29.第四,待材料管12移动所设距离后,控制气动卡爪105重新夹紧材料管12,然后通过单片机控制器13控制伺服电机102进行转动,伺服电机102带动主动齿轮103和从动齿盘104转动啮合,从而通过从动齿盘104的转动带动材料管12进行转动,通过激光切割部件11进行切割工作,待切割至尾料部分时,可先通过控制导轨3内轨上左侧的卡盘主体82受行走电机6带动推动材料管12最大限度地进入固定卡盘9内部,然后控制导轨3内轨上右侧的卡
盘主体82靠近固定卡盘9,并通过固定卡盘9收行走电机6带动配合,将材料管12夹紧在固定卡盘9和右侧的卡盘主体82内侧,通过固定卡盘9向左侧移动越过激光切割部件11,使尾料切割部分放置在激光切割部件11下方,通过旋定机构10转动配合激光切部件11进行切割,有利于有效地对尾料进行切割,减少材料的浪费。
30.本实用新型通过改进提供一种无尾料的全自动切管机,设置气槽83和快速接气口84,有利于快速接通高压气作为动力进行夹紧动作,设置限位槽87和移动杆88,有利于带动移动板89进行夹紧工作,设置电磁环810和滚珠811,有利于灵活控制滚珠811的滚动,从而控制对材料管12的位移和旋转工作,设置主动齿轮103和从动齿盘104,有利于通过齿轮传动配合激光切割部件11的切割工作,设置气动卡爪105,有利于夹紧材料管配合切割工作。
31.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点,并且本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
32.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1