激光芯片光波导与底板的对位贴合装置的制作方法
激光芯片光波导与底板的对位贴合装置
【技术领域】
1.本实用新型涉及对位设备技术领域,特别涉及激光芯片光波导与底板的对位贴合装置。
背景技术:
2.现有技术的激光器(ld)与底板的对位贴合中,吸嘴吸取后芯片产品后,底部光学相机抓取外轮廓对产品定位,进行直接与底板贴合,导致贴合精度不高。
技术实现要素:
3.为了克服上述问题,本实用新型提出一种可有效解决上述问题的激光芯片光波导与底板的对位贴合装置。
4.本实用新型解决上述技术问题提供的一种技术方案是:提供一种激光芯片光波导与底板的对位贴合装置,包括机台主体,所述机台主体下方设置有大理石底板;所述机台主体一侧设置有xy直线驱动装置,所述xy直线驱动装置上设置有共晶焊接台和中转定位台,中转定位台上方设置上下拍照单元;所述共晶焊接台和中转定位台上方设置有z轴直线驱动装置,所述z轴直线驱动装置一侧设置有旋转驱动装置,所述旋转驱动装置下方设置有第一吸嘴和第二吸嘴;所述中转定位台包括一中转环形光源,中转环形光源的环形中空部设置有透明承载台,所述中转环形光源的下方设置有中转底部棱镜,中转底部棱镜的侧方设置有中转底部相机;上下拍照单元包括棱镜分光部和相机拍摄部,所述棱镜分光部包括一等边直角三角分光棱镜,所述相机拍摄部包括一拍摄相机,拍摄相机前端设置有拍摄镜头。
5.优选地,所述共晶焊接台包括焊接腔室,所述焊接腔室侧部设置有脉冲加热板,所述焊接腔室侧部分别连通有氮气入口、氮气冷却吹气口和真空吸孔。
6.优选地,所述等边直角三角分光棱镜包括两垂直的直角面和一连接两直角面的斜面,所述拍摄镜头垂直对应斜面,两直角面相交的直角棱正对拍摄镜头的中心。
7.优选地,所述两直角面的外侧镀膜。
8.优选地,所述棱镜分光部还包括第一基座和第二基座,所述第一基座一侧固定有滑轨,所述第二基座滑动连接于滑轨,第二基座可沿滑轨来回滑动。
9.优选地,所述第一基座的侧部一体成型有竖直的棱镜安装板,所述等边直角三角分光棱镜的斜面贴合固定于棱镜安装板上。
10.优选地,所述等边直角三角分光棱镜的正上方设置有上光源,等边直角三角分光棱镜的正下方设置有下光源。
11.优选地,所述上光源上方设置有上挡光片,下光源下方设置有下挡光片,上挡光片一端连接有上驱动气缸,下挡光片一端连接有下驱动气缸,上驱动气缸和下驱动气缸均为转动气缸。
12.优选地,所述机台主体的侧方上部设置有上罩,所述机台主体的侧方下部设置有下罩。
13.优选地,所述中转环形光源侧部设置有物料放置盘。
14.与现有技术相比,本实用新型的激光芯片光波导与底板的对位贴合装置通过上下拍照单元和中转定位台对芯片产品的上下两个面分别定位,将基准转移到精度较高的光波导上,提高芯片光波导的提取精度,能有效提高贴合精度,结构简单,操作方便,能有效减少人工干涉,提高焊接对位自动化,提高焊接对位效率和焊接对位质量;光路简单,成本较低,上下两个产品只需使用一个拍摄相机拍照,相机标定简单,图像处理简单,贴合精度高,一致性好,并且兼容性高,具有不同的打光模式,不同的拍照模式。
【附图说明】
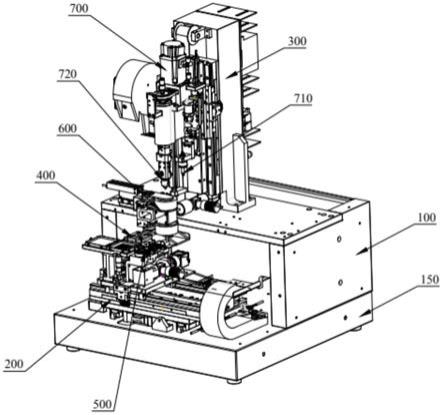
15.图1为本实用新型激光芯片光波导与底板的对位贴合装置的整体结构图;
16.图2为本实用新型激光芯片光波导与底板的对位贴合装置的内部结构图;
17.图3为本实用新型激光芯片光波导与底板的对位贴合装置的共晶焊接台结构图;
18.图4为本实用新型激光芯片光波导与底板的对位贴合装置的中转定位台结构图;
19.图5为本实用新型激光芯片光波导与底板的对位贴合装置的上下拍照单元整体结构图;
20.图6为本实用新型激光芯片光波导与底板的对位贴合装置的上下拍照单元的棱镜分光部结构图;
21.图7为本实用新型激光芯片光波导与底板的对位贴合装置的上下拍照单元的等边直角三角分光棱镜端面图。
【具体实施方式】
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施实例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本实用新型,并不用于限定本实用新型。
23.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅限于指定视图上的相对位置,而非绝对位置。
24.另外,在本实用新型中如涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
25.请参阅图1至图7,本实用新型的激光芯片光波导与底板的对位贴合装置,适用于光通信领域共晶焊接,特别适用于芯片与底板的焊接,包括机台主体 100,所述机台主体100下方设置有大理石底板150,大理石底板150用于支撑机台主体100,稳定性更高,利于保障焊接精度。所述机台主体100一侧设置有xy直线驱动装置200,所述xy直线驱动装置200上设置有共晶焊接台 400和中转定位台500,xy直线驱动装置200用于调整共晶焊接台400和中转定位台500在xy方向的位置,共晶焊接台400用于焊接芯片与底板,中转定位台500用于获取芯片上下表面特征点位置信息。
26.所述共晶焊接台400和中转定位台500上方设置有z轴直线驱动装置 300,所述z轴直线驱动装置300一侧设置有旋转驱动装置700,所述旋转驱动装置700下方设置有第一吸
嘴710和第二吸嘴720,所述z轴直线驱动装置300可驱动旋转驱动装置700上下移动,旋转驱动装置700可驱动第一吸嘴 710和第二吸嘴720转动,实现较为灵活的位置调节。
27.所述机台主体100的侧方上部设置有上罩110,用于遮挡z轴直线驱动装置300、旋转驱动装置700、第一吸嘴710和第二吸嘴720,提高设备整体性。所述机台主体100的侧方下部设置有下罩120,用于遮挡xy直线驱动装置 200、共晶焊接台400和中转定位台500,提高设备整体性。所述上罩110和下罩120均设置有开口,用于作为运输通道。
28.所述机台主体100上侧设置有信号塔灯140,用于提示。所述上罩110外侧设置有急停按钮160,用于突发情况紧急停止。所述下罩120上侧设置有监控仪表130,用于观察数据。所述机台主体100内部设置有控制系统,用于总体协调控制。
29.所述共晶焊接台400包括焊接腔室410,所述焊接腔室410侧部设置有脉冲加热板420,所述焊接腔室410侧部分别连通有氮气入口430、氮气冷却吹气口440和真空吸孔450,真空吸孔450用于抽真空在焊接腔室410上产生吸附力固定产品。
30.所述中转定位台500包括一中转环形光源510,中转环形光源510的环形中空部设置有透明承载台,用于真空吸附放置芯片。所述中转环形光源510 的下方设置有中转底部棱镜520,中转底部棱镜520的侧方设置有中转底部相机530,所述中转底部相机530的一侧设置有中转同轴光发射器540,中转底部相机530通过中转底部棱镜520对放置在承载台的芯片底部进行拍照。所述中转环形光源510侧部设置有物料放置盘550,用于放置产品。
31.所述上下拍照单元600包括棱镜分光部和相机拍摄部,所述棱镜分光部包括一等边直角三角分光棱镜622,所述相机拍摄部包括一拍摄相机630,拍摄相机630前端设置有拍摄镜头640,所述等边直角三角分光棱镜622包括两垂直的直角面6221和一连接两直角面6221的斜面6222,所述拍摄镜头640 垂直对应斜面6222,两直角面6221相交的直角棱6223正对拍摄镜头640的中心。所述两直角面6221的外侧镀膜,用于反光成像。
32.所述棱镜分光部还包括第一基座610和第二基座620,所述第一基座610 一侧固定有滑轨611,所述第二基座620滑动连接于滑轨611,第二基座620 可沿滑轨611来回滑动。所述第一基座610上方固定有第一气缸612,第一气缸612的输出端连接于第二基座620,第一气缸612驱动第二基座620沿滑轨 611来回滑动。
33.所述第一基座610的侧部一体成型有竖直的棱镜安装板621,所述等边直角三角分光棱镜622的斜面6222贴合固定于棱镜安装板621上。所述等边直角三角分光棱镜622的正上方设置有上光源623,等边直角三角分光棱镜622 的正下方设置有下光源624,上光源623和下光源624用于补光,可满足不同产品的不同特征的图像品质要求。所述上光源623上方设置有上挡光片625,下光源624下方设置有下挡光片626,上挡光片625一端连接有上驱动气缸 627,下挡光片626一端连接有下驱动气缸628,上驱动气缸627和下驱动气缸628均为转动气缸,用于分别控制上挡光片625和下挡光片626转动,实现对等边直角三角分光棱镜622上下两条光路的开闭。所述上驱动气缸627 和下驱动气缸628均固定于第二基座620。所述第二基座620上还固定有两光源安装板629,所述上光源623和下光源624分别固定于光源安装板629。所述光源安装板629中部开设有透光孔6291,用于透光。所述上光源623和下光源624为环形光源,上光源623和下光源624的环形中空部对应光源安装板629的透光孔6291。
34.所述相机拍摄部还包括第三基座670,所述拍摄相机630和拍摄镜头640 固定于第
三基座670。所述第三基座670后端连接有第二气缸660,第二气缸 660驱动第三基座670移动从而带动拍摄镜头640移动,达到调焦目的。所述拍摄镜头640一侧设置有同轴光发射器650,同轴光发射器650从拍摄镜头 640内部发出同轴光,同轴光从拍摄镜头640发出,在等边直角三角分光棱镜 622上分成上下两路,在产品上打光,两路入射光照均匀。
35.上下拍照单元600工作时,拍摄相机630上下拍照定位后,等边直角三角分光棱镜622在第一气缸612的驱动下移开,上下两个产品靠近对位。入射的上下光路各转690度,穿过镜头,在拍摄相机630上成像,这种成像方式结构简单,上下光通量均匀。上挡光片625和下挡光片626可选择性开合,满足上下图像的亮度要求。产品拍照也可选择性开启一路拍照,一路闭合,或者两路同时开启,在拍摄相机630上两个产品同时成重叠的像。
36.设备整体工作时,第一吸嘴710从物料放置盘550吸取底板,放入共晶焊接台400的焊接腔室410内;第二吸嘴720从物料放置盘550吸取芯片,放入中转定位台500的承载台上,中转定位台500移动到上下拍照单元600 的下方,上下拍照单元600的拍摄相机630对芯片的上表面进行拍照,计算顶部外轮廓;中转定位台500的中转底部相机530拍芯片下表面,计算底部外轮廓,图像处理,得到芯片下表面与上表面特征点位置,重合归一处理,计算下轮廓与光波导的位置差值;第二吸嘴720从中转定位台500吸取芯片,并移动至上下拍照单元600的上方,放有底板的焊接腔室410移动至上下拍照单元600的下方,上下拍照单元600的拍摄相机630,拍照上方的芯片,与下方的底板,图像处理误差,计算芯片的光波导与底板的位置偏差,通过xy 直线驱动装置200和z轴直线驱动装置300调整位置,定位误差补偿进行对位;z轴直线驱动装置300控制第二吸嘴720下降,芯片与底板贴合;共晶焊接台400按照工艺参数,升温,焊接,保温,降温,完成焊接过程;焊接完成后,第二吸嘴720吸取焊接完成的产品进行下料。
37.与现有技术相比,本实用新型的激光芯片光波导与底板的对位贴合装置通过上下拍照单元600和中转定位台500对芯片产品的上下两个面分别定位,将基准转移到精度较高的光波导上,提高光波导的提取精度,能有效提高贴合精度,结构简单,操作方便,能有效减少人工干涉,提高焊接自动化,提高焊接效率和焊接质量;光路简单,成本较低,上下两个产品只需使用一个拍摄相机630拍照,相机标定简单,图像处理简单,贴合精度高,一致性好,并且兼容性高,具有不同的打光模式,不同的拍照模式。
38.以上所述仅为本实用新型的较佳实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的构思之内所作的任何修改,等同替换和改进等均应包含在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1