一种滚压成型设备自动下料装置的制作方法
1.本实用新型涉及一种滚压成型设备自动下料装置,用于自动将滚压后的滚压底板下料叠放到料框内。
背景技术:
2.滚压底板是一种利用滚压工艺金属板,由于滚压工艺的不同,导致滚压底板的产品规格有多种类型,但是滚压底板可以粗分两种类型,一种滚压底板是底板的板面是处于同一个平面只是滚压底板上滚压了折痕,而另一种类型的滚压底板通过滚压工艺后使滚压底板形成了不同高度的板面,这两种滚压底板在进行滚压后都需要下料,而目前的下料采用人工操作,工人将滚压底板放置在料框内叠放,这种方式工人的劳动强度大,效率低。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供一种滚压成型设备自动下料装置,该自动下料装置能够满足两种类型的滚压底板的输送、下料和叠放要求。
4.为解决上述技术问题,本实用新型的技术方案是:一种滚压成型设备自动下料装置,包括第一输送装置和第二输送装置,所述第一输送装置的一端与第一滚压机衔接用于输送一类滚压底板;所述第二输送装置的一端与第二滚压机衔接用于输送二类滚压底板,所述第一输送装置和第二输送装置的另一端分别为一类下料工位和二类下料工位,所述第一输送装置和第二输送装置上分别安装有将一类滚压底板和二类滚压底板定位于一类下料工位和二类下料工位上的定位机构,所述自动下料装置还包括机械手,所述机械手的终端上固定有吸取一类滚压底板和第二滚压底板的吸取装置,所述一类下料工位和二类下料工位的周围放置有用于接收一类滚压底板和二类滚压底板的料框,所述机械手安装于移动机构上,该移动机构带动机械手在一类下料工位和二类下料工位之间滑动。
5.作为一种优选的方案,所述第一输送装置包括第一输送机架,所述第一输送机架的两侧设置有第一防护板和第二防护板,所述第一防护板和第二防护板中间形成了第一输送区域,所述第一输送机架上位于第一输送区域安装有相互配合的第一循环输送带和辅助输送辊组,所述第一循环输送带由第一输送动力装置驱动,所述辅助输送辊组的上端部高于第一循环输送带;所述定位机构安装于第一输送机架上,因此,一类滚压底板在进入到第一输送装置时,由于板面的高度不同,低板面的底部会被第一循环输送带支撑,而高板面的底部会被辅助输送辊组支撑,这样使一类滚压底板能更平稳的移动到一类下料工位,方便机械手的准确的吸取。
6.作为一种优选的方案,所述定位机构包括端部定位装置和横向定位装置,所述横向定位装置安装于端部定位装置的上游,所述横向定位装置包括横向滑动安装于第一输送机架上的活动定位推板,所述活动定位推板由横向动力装置驱动将一类滚压底板定位在第一防护板或第二防护板,所述端部定位装置安装于第一输送机架的下游端用于阻挡定位一类滚压底板,该定位机构可以对一类滚压底板的端部和侧面进行定位,从而确保每次吸取
之前一类滚压底板的位置都是一致的,这样可以使机械手吸取一类滚压底板后准确的叠放到料框中。
7.作为一种优选的方案,所述端部定位装置包括固定于第一输送机架上的端部定位块,所述端部定位块处于第一循环输送带的上方,所述辅助输送辊组延伸至端部定位块的上游端面。
8.作为一种优选的方案,所述端部定位装置包括固定于第一输送机架上且位于输送下游的端部安装座,所述端部安装座上通过纵向调节结构安装有端部定位板,所述纵向调节结构沿与输送方向平行的方向调整端部定位板的位置,采用该端部定位装置可以调节端部定位板的位置,从而满足不同尺寸的一类滚压底板的定位要求。
9.作为一种优选的方案,所述第二输送装置包括第二输送机架,所述第二输送机架上转动安装有由第二输送动力装置驱动的主动带轮和从动带轮,所述主动带轮上设置有间隔的第一主动安装轴段和第二主动安装轴段,所述从动带轮上设置有间隔的第一从动安装轴段和第二从动安装轴段,所述第一主动安装轴段和第一从动安装轴段之间安装有第二循环输送带,所述第二主动安装轴段和第二从动安装轴段之间安装有第三循环输送带,所述第二循环输送带和第三循环输送带共同形成了输送区域,所述第二循环输送带和第三循环输送带之间形成了方便滚压底板中部折痕通过的通道,所述第二输送机架上还设置有所述的定位机构,第二输送装置通过第二循环输送带和第三循环输送带支撑二类滚压底板的板面,而同时,二类滚压底板的中间折痕处于通道中,从而保证平整输送,方便机械手的吸取装置能够更稳定可靠的吸取二类滚压底板。
10.作为一种优选的方案,所述吸取装置包括连接座,所述连接座上安装有若干个磁吸头,所述连接座可拆卸安装于机械手的终端,利用连接座可以快速安装在机械手的终端,同时磁吸头可以很好的通过磁力作用固定一类滚压底板和二类滚压底板。
11.作为一种优选的方案,所述磁吸头包括至少一个固定磁吸头和至少一个活动磁吸头,所述固定磁吸头固定在连接座的下部,所述活动磁吸头固定安装于升降板上,所述升降板升降安装于连接座上且由升降动力装置驱动,该磁吸头的活动磁吸头可以通过升降动力装置驱动升降,从而调整活动磁吸头和固定磁吸头之间的高度差,这样就同时可以适合平整的二类滚压底板或者不平整的一类滚压底板,无需更换磁吸头。
12.作为一种优选的方案,所述连接座的底部还安装有用于检测吸取装置是否吸取到滚压底板的检测传感器,这样可以快速有效的检测磁吸头是否吸取到滚压底板,保证工作的可靠性。
13.作为一种优选的方案,所述移动机构包括安装底板和固定于安装底板上的直线导轨,所述直线导轨上滑动安装有移动滑座,所述机械手固定于移动滑座上,所述移动滑座和安装底板之间设置有驱动移动滑座滑动的滑动动力装置。
14.采用了上述技术方案后,本实用新型的效果是:由于该滚压底板自动下料装置,包括第一输送装置和第二输送装置,所述第一输送装置的一端与第一滚压机衔接用于输送一类滚压底板;所述第二输送装置的一端与第二滚压机衔接用于输送二类滚压底板,所述第一输送装置和第二输送装置的另一端分别为一类下料工位和二类下料工位,所述第一输送装置和第二输送装置上分别安装有将一类滚压底板和二类滚压底板定位于一类下料工位和二类下料工位上的定位机构,所述自动下料装置还包括机械手,所述机械手的终端上固
定有吸取一类滚压底板和第二滚压底板的吸取装置,所述一类下料工位和二类下料工位的周围放置有用于接收一类滚压底板和二类滚压底板的料框,所述机械手安装于移动机构上,该移动机构带动机械手在一类下料工位和二类下料工位之间滑动,因此,第一滚压机和第二滚压机择一开启,此时机械手会通过移动机构带动移动到对应的工位,一类滚压底板或者二类滚压底板由对应的输送装置输送到一类下料工位或者二类下料工位,然后机械手上的吸取装置将对应的一类滚压底板或二类滚压底板转移到料框中,这样,该自动下料装置可以满足两种类型的滚压底板的转移要求,节省了成本,同时效率提高。
附图说明
15.下面结合附图和实施例对本实用新型进一步说明。
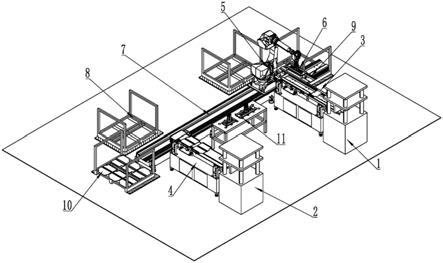
16.图1是本实用新型实施例的结构立体图;
17.图2是本实用新型实施例的另一个角度立体图;
18.图3是本实用新型实施例的俯视图;
19.图4是第一输送装置的结构立体图;
20.图5是吸取装置的立体图;
21.图6是第二输送装置的结构立体图;
22.附图中:1、第一滚压机;2、第二滚压机;3、第一输送装置;31、第一输送机架;32、第一循环输送带;33、辅助输送辊组;34、第一防护板;35、活动定位推板;36、横向动力装置;37、端部安装座;38、安装块;39、导杆;310、端部定位板;311、第二防护板;4、第二输送装置;41、第二输送机架;42、主动带轮;421、第一主动安装轴段;422、第二主动安装轴段;43、从动带轮;431、第一从动安装轴段;432、第二从动安装轴段;44、第二循环输送带;45、第三循环输送带;46、通道;5、机械手;6、吸取装置;61、连接座;62、固定磁吸头;63、活动磁吸头;64、升降板;65、升降动力装置;66、检测传感器;7、移动机构;71、安装底板;72、直线导轨;73、移动滑座;8、料框;9、一类滚压底板;10、二类滚压底板;11、放置架。
具体实施方式
23.下面通过具体实施例对本实用新型作进一步的详细描述。
24.如图1至图6所示,一种滚压成型设备自动下料装置,包括第一输送装置3和第二输送装置4,所述第一输送装置3的一端与第一滚压机1衔接用于输送一类滚压底板9;所述第二输送装置4的一端与第二滚压机2衔接用于输送二类滚压底板10,其中第一滚压机1和第二滚压机2为常规结构,通过滚压的方式压制成一块块滚压底板,其中,本实施例中,由于滚压后得到底板类型不同,一类滚压底板9为板面压痕后形成了高度不动的板面,而二类滚压底板10为板面平整且中部有中间折痕的形状。
25.所述第一输送装置3和第二输送装置4的另一端分别为一类下料工位和二类下料工位,所述第一输送装置3和第二输送装置4上分别安装有将一类滚压底板9和二类滚压底板10定位于一类下料工位和二类下料工位上的定位机构,所述自动下料装置还包括机械手5,所述机械手5的终端上固定有吸取一类滚压底板9和第二滚压底板的吸取装置6,所述一类下料工位和二类下料工位的周围放置有用于接收一类滚压底板9和二类滚压底板10的料框8,所述机械手5安装于移动机构7上,该移动机构7带动机械手5在一类下料工位和二类下
料工位之间滑动。
26.如图4所示,所述第一输送装置3包括第一输送机架31,所述第一输送机架31的两侧设置有第一防护板34和第二防护板311,所述第一防护板34和第二防护板311中间形成了第一输送区域,所述第一输送机架31上位于第一输送区域安装有相互配合的第一循环输送带32和辅助输送辊组33,所述第一循环输送带32由第一输送动力装置驱动,所述辅助输送辊组33的上端部高于第一循环输送带32;所述定位机构安装于第一输送机架31上,由于一类滚压底板9的板面的高度不同,低板面的底部会被第一循环输送带32支撑,而高板面的底部会被辅助输送辊组33支撑,这样使一类滚压底板9能更平稳的移动到一类下料工位,方便机械手5的准确的吸取。
27.本实施例中,所述定位机构包括端部定位装置和横向定位装置,所述横向定位装置安装于端部定位装置的上游,所述横向定位装置包括横向滑动安装于第一输送机架31上的活动定位推板35,所述活动定位推板35由横向动力装置36驱动将一类滚压底板9定位在第一防护板34或第二防护板311,如图6所示,在机架上位于活动定位推板35的上游侧设置有上游定位板,从而再输送时进行导向,当一类滚压底板9或二类滚压底板10进入到活动定位推板35范围时,活动定位推板35横向移动将一类滚压底板9或二类滚压底板10定位于第一防护板34上。
28.所述端部定位装置安装于第一输送机架31的下游端用于阻挡定位一类滚压底板9,该定位机构可以对一类滚压底板9的端部和侧面进行定位,从而确保每次吸取之前一类滚压底板9的位置都是一致的,这样可以使机械手5吸取一类滚压底板9后准确的叠放到料框8中。
29.本实施例中,所述端部定位装置的结构有两种方式:一种是端部定位装置包括固定于第一输送机架31上的端部定位块,所述端部定位块处于第一循环输送带32的上方,所述辅助输送辊组33延伸至端部定位块的上游端面。
30.另一种方式为如图4所示,所述端部定位装置包括固定于第一输送机架31上且位于输送下游的端部安装座37,所述端部安装座37上通过纵向调节结构安装有端部定位板310,所述纵向调节结构沿与输送方向平行的方向调整端部定位板310的位置,该纵向调节结构包括固定在端部安装座37上的安装块38,该安装块38上安装有导杆39,导杆39与端部定位板310连接,安装块38上安装有锁紧螺栓将导杆39固定,采用该端部定位装置可以调节端部定位板310的位置,从而满足不同尺寸的一类滚压底板9的定位要求。端部定位装置安装在第一输送装置3和第二输送装置4上的方式相同。
31.所述第二输送装置4包括第二输送机架41,所述第二输送机架41上转动安装有由第二输送动力装置驱动的主动带轮42和从动带轮43,所述主动带轮42上设置有间隔的第一主动安装轴段421和第二主动安装轴段422,所述从动带轮43上设置有间隔的第一从动安装轴段431和第二从动安装轴段432,所述第一主动安装轴段421和第一从动安装轴段431之间安装有第二循环输送带44,所述第二主动安装轴段422和第二从动安装轴段432之间安装有第三循环输送带45,所述第二循环输送带44和第三循环输送带45共同形成了输送区域,所述第二循环输送带44和第三循环输送带45之间形成了方便滚压底板中部折痕通过的通道46,所述第二输送机架41上还设置有所述的定位机构,第二输送装置4通过第二循环输送带44和第三循环输送带45支撑二类滚压底板10的板面,而同时,二类滚压底板10的中间折痕
处于通道46中,从而保证平整输送,方便机械手5的吸取装置6能够更稳定可靠的吸取二类滚压底板10。
32.所述吸取装置6包括连接座61,所述连接座61上安装有若干个磁吸头,所述连接座61可拆卸安装于机械手5的终端,利用连接座61可以快速安装在机械手5的终端,同时磁吸头可以很好的通过磁力作用固定一类滚压底板9和二类滚压底板10。当然,一类滚压底板9和二类滚压底板10可以采用对应特定的吸取装置6进行磁吸,因此在第一输送装置3和第二输送装置4之间设置有用来放磁吸装置的放置架11。
33.当然如图5所示,所述磁吸头包括至少一个固定磁吸头62和至少一个活动磁吸头63,所述固定磁吸头62固定在连接座61的下部,所述活动磁吸头63固定安装于升降板64上,所述升降板64升降安装于连接座61上且由升降动力装置65驱动,该磁吸头的活动磁吸头63可以通过升降动力装置65驱动升降,从而调整活动磁吸头63和固定磁吸头62之间的高度差,这样就同时可以适合平整的二类滚压底板10或者不平整的一类滚压底板9,无需更换磁吸头。
34.所述连接座61的底部还安装有用于检测吸取装置6是否吸取到滚压底板的检测传感器66,这样可以快速有效的检测磁吸头是否吸取到滚压底板,保证工作的可靠性,该检测传感器66可以采用接近开关或者其他光电传感器。
35.所述移动机构7包括安装底板71和固定于安装底板71上的直线导轨72,所述直线导轨72上滑动安装有移动滑座73,所述机械手5固定于移动滑座73上,所述移动滑座73和安装底板71之间设置有驱动移动滑座73滑动的滑动动力装置,该滑动动力装置包括固定在安装底板71上的电机,并且在安装底板71上设置有与直线导轨72平行的齿条,电机的输出轴上安装有与齿条啮合的齿轮,这样安装底板71就可以沿直线导轨72移动。
36.本实施例中提到的气路系统、伺服电机等执行装置、齿轮传动机构、丝杠螺母机构均为目前的常规技术,在2008年4月北京第五版第二十八次印刷的《机械设计手册第五版》中详细的公开了气缸、电机以及其他传动机构的具体结构和原理和其他的设计,属于现有技术,其结构清楚明了,2008年08月01日由机械工业出版社出版的现代实用气动技术第3版smc培训教材中就详细的公开了真空元件、气体回路和程序控制,表明了本实施例中的气路结构也是现有的技术,清楚明了,在2015年07月01日由化学工业出版社出版的《电机驱动与调速》书中也详细的介绍了电机的控制以及行程开关,因此,电路、气路连接都是清楚。
37.以上所述实施例仅是对本发明的优选实施方式的描述,不作为对本发明范围的限定,在不脱离本发明设计精神的基础上,对本发明技术方案作出的各种变形和改造,均应落入本发明的权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1