一种五轴激光去油墨机构的制作方法
1.本实用新型涉及曲面激光去油墨的技术领域,特别涉及一种五轴激光去油墨机构。
背景技术:
2.激光去油墨技术是针对激光打标的一种应用,由于纳米效应,通过表面物质的蒸发露出深层物质,或者是通过光能导致表面物质的化学变化而“刻”出痕迹,或者通过光能烧掉部分物质,显出所刻蚀的图案,文字。目前,传统的激光激光机大部分采用三轴移动对工件进行激光去除处理。
3.随着社会的发展,传统的激光去油墨机逐渐显现出一些弊端:1.无法自动改变工件的激光去除角度,只能实现平面激光去除。2.没有配置视觉系统,激光去除精度不高。
技术实现要素:
4.本实用新型所要解决的技术问题是克服现有技术的不足,提供一种五轴驱动产品实现曲面去油墨、激光去油墨精准度高的一种五轴激光去油墨机构。
5.本实用新型所采用的技术方案是:本实用新型包括底座、承载台以及移载组件,所述承载台设置在所述底座上,所述移载模组与所述定位模组均设置在所述承载台上,所述移载组件包括x轴运动装置、y轴运动装置、z轴运动装置、第一旋转驱动装置以及第二旋转驱动装置,所述第二旋转驱动装置上设置有与产品相适配的载具,所述定位模组配合设置在所述载具的上方。
6.进一步,所述定位模组包括支撑架、标记组件、第一工业相机、第二工业相机以及激光组件,所述支撑架设置在所述承载台上,所述支撑架上设置有连接座,所述标记组件、所述第一工业相机以及所述第二工业相机均与所述连接座相连接,所述激光组件设置在所述支撑架的一侧并与所述承载台相连接。
7.进一步,所述标记组件包括连接板、标记驱动装置以及标记装置,所述连接板与所述连接座的中部相连接,所述标记驱动装置设置在所述连接板上,所述标记装置设置在所述标记驱动装置的活动端。
8.进一步,所述第一工业相机通过第一转接板设置在所述连接座的下部。
9.进一步,所述第二相机组件通过第二转接板与所述连接座的上端相连接。
10.进一步,还包括外框架,三色灯组件、自动门组件、光栅组件以及控制组件,所述底座、所述承载台、所述移载组件、所述定位模组均设置在所述外框架内部,所述三色灯组件与所述控制组件设置在所述外框架表面,所述自动门组件设置在所述外框架的一端,所述光栅组件设置在所述自动门组件的开口处。
11.本实用新型的有益效果是:本实用新型采用五轴平台的结构设计,包括x轴运动装置、y轴运动装置、z轴运动装置、第一旋转驱动装置以及第二旋转驱动装置,五轴平台带动产品在激光头前多方向运动,使产品在激光去油墨时可进行角度调整,实现产品空间曲面
去油墨效果,提高加工效率以及加工精度;加入第一工业相机以及第二工业相机的结构设计,双相机对产品进行二次定位并反馈至外部移载控制器,实现产品位置精准调节,提升产品加工精度。
附图说明
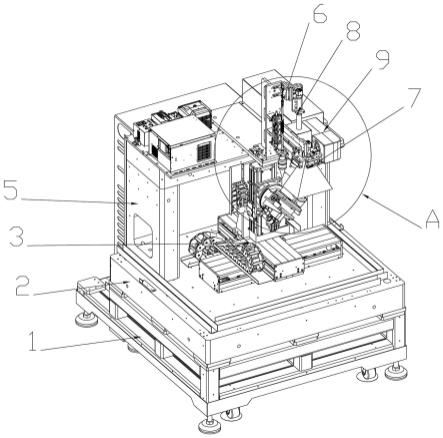
12.图1是本实用新型的结构示意图;
13.图2是图1中a部分的结构示意图;
14.图3是本实用新型移载组件的结构示意图;
15.图4是本实用新型整体结构的结构示意图;
16.图5是本实用新型自动门组件的结构示意图。
具体实施方式
17.如图1至图5所示,在本实施例中,本实用新型包括底座1、承载台2、移载组件3以及定位模组4,所述承载台2设置在所述底座1上,所述移载模组3与所述定位模组4均设置在所述承载台2上,所述移载组件3包括x轴运动装置301、y轴运动装置302、z轴运动装置303、第一旋转驱动装置304以及第二旋转驱动装置305,所述第二旋转驱动装置305上设置有与产品相适配的载具306,所述定位模组4配合设置在所述载具306的上方,所述x轴运动装置301、所述y轴运动装置302以及所述z轴运动装置303均采用滑台,所述第一旋转驱动装置304以及所述第二旋转驱动装置305均采用旋转电机。采用五轴平台的结构设计,五轴平台带动产品在激光头前多方向运动,使产品在激光去油墨时可进行角度调整,实现产品空间曲面去油墨效果,提高加工效率以及加工精度。
18.在本实施例中,所述定位模组4包括支撑架5、标记组件6、第一工业相机7、第二工业相机8以及激光组件9,所述支撑架5设置在所述承载台2上,所述支撑架5包括若干侧板502以及顶板503,所述顶板503与若干所述侧板502相连接,若干所述侧板502采用大理石材质,所述连接座501设置在所述顶板503上,所述支撑架5上设置有连接座501,所述标记组件6、所述第一工业相机7以及所述第二工业相机8均与所述连接座501相连接,所述激光组件9设置在所述支撑架5的一侧并与所述承载台2相连接,所述激光组件9与所述第二工业相机8相配合对产品定位加工,所述标记组件6采用。加入第一工业相机7以及第二工业相机8的结构设计,双相机对产品进行二次定位并反馈至外部移载控制器,实现产品位置精准调节,提升产品加工精度;并采用激光组件9与第二工业相机8配合加工,伪同轴定位激光对曲面定位精准,实现空间曲面高精度去油墨处理。
19.在本实施例中,所述标记组件6包括连接板601、标记驱动装置602以及标记装置603,所述连接板601与所述连接座501的中部相连接,所述标记驱动装置602设置在所述连接板601上,所述标记装置603设置在所述标记驱动装置602的活动端,所述标记装置603的一端与产品配合定位,所述标记装置603的另一端与外部移载控制器相连接。采用标记组件6对产品位置进行检测,并将数据导通至外部移载控制器中,调整产品位置。
20.在本实施例中,所述第一工业相机7通过第一转接板701设置在所述连接座501的下部,所述第一工业相机7采用大视觉视觉系统,用于检测产品轮廓,定位产品至待加工区域。
21.在本实施例中,所述第二工业相机8通过第二转接板801与所述连接座501的上端相连接,所述第二工业相机8采用伪同轴视觉系统,并与所述激光组件9相配合对产品进行激光去油墨加工。
22.在本实施例中,还包括外框架10,三色灯组件11、自动门组件12、光栅组件13以及控制组件14,所述底座1、所述承载台2、所述移载组件3、所述定位模组4均设置在所述外框架10内部,所述三色灯组件11与所述控制组件14设置在所述外框架10表面,所述自动门组件12设置在所述外框架10的一端,所述光栅组件13设置在所述自动门组件12的开口处,所述自动门组件12包括门体121、门框导轨123以及自动气缸125,所述门框导轨123设置在所述外框架10上,所述门体121与所述门框导轨123滑动配合,所述自动气缸125设置在所述外框体上,所述自动气缸125的输出端与所述门体121相连接。
23.本实用新型的工作原理:
24.气缸伸出,带动门体121在门框轨道内向上运动,自动门打开,将产品放入第二旋转驱动装置305输出端处,并由第一工业相机7对产品整体轮廓识别与定位,标记组件6对产品位置进行标记定位,将数据反馈至外部移载控制端,移载组件3调整产品加工位置到第二工业相机8处,进行二次定位识别,第二工业相机8配合激光组件9对产品空间曲面激光去油墨处理。
25.虽然本实用新型的实施例是以实际方案来描述的,但是并不构成对本实用新型含义的限制,对于本领域的技术人员,根据本说明书对其实施方案的修改及与其他方案的组合都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1