一种电子插件激光焊接打码追溯设备的制作方法
1.本实用新型属于激光焊接技术领域,具体为一种电子插件激光焊接打码追溯设备。
背景技术:
2.一般的电子插件通常由人工手动将包括引脚等各种元件,例如电感、电容或电阻等,插入到对应的插孔中,然后进行焊接。焊接的方式一般分为人工焊接和激光焊接两种,人工的焊接不仅人力成本高,而且生产效率低下,无法适应现代生产的需求;激光焊接是目前最先进的制造方法之一,其焊接质量稳定可靠,焊接速度快,深度大、变形小,同时也可以焊接一些难以接近的部位,实行非接触远距离焊接,具有很大的灵活性。
3.随着产品加工质量、品质要求的提高,人们对绿色生态环境的向往、产品问题的追溯等现代理念对设备的要求越来越高。
4.因此,亟需研发出一种新的设备,以实现智能化生产。
技术实现要素:
5.为了解决上述背景技术中的问题,本实用新型提供一种电子插件激光焊接打码追溯设备,通过四工位旋转平台的加工,可同时进行上下料、激光打码、插入引脚、激光焊接的工序,生产效率大大提高。
6.本实用新型采用以下技术方案:一种电子插件激光焊接打码追溯设备,包括机架、设置于机架上的四工位旋转组件、以及分别设置于机架相邻两侧的第一上料组件和第二上料组件,其中:
7.四工位旋转组件包括旋转工作台,机架上沿旋转工作台的旋转方向依次设置有上下料工位、激光打码工位、组装工位、及焊接工位,旋转工作台上周向间隔设置有四个定位夹具,旋转工作台周期的转动使得上下料工位、激光打码工位、组装工位、及焊接工位上均对应有定位夹具;
8.上下料工位、激光打码工位、组装工位、及焊接工位的一侧分别对应设置有搬运组件、第一光路组件、插入组件、及第二光路组件;
9.搬运组件设置于第一上料组件的输出端,插入组件设置于第二上料组件的输出端;
10.进一步的,四工位旋转组件还包括支座、固定于支座上的电机、以及设置于旋转工作台下方的光电开关,旋转工作台通过联轴器与电机输出轴连接。
11.进一步的,第一上料组件和第二上料组件均包括支撑架、位于支撑架上的振动盘、与振动盘连通的输送通道、以及位于输送通道下端的直振器。
12.进一步的,搬运组件包括固定于机架上的旋转底座、设置在旋转底座上的转轴、以及与转轴固定连接的转盘,转盘上呈90
°
设置有第一夹板和第二夹板,第一夹板由第一气缸驱动夹持,第二夹板由第二气缸驱动夹持,转盘由第一伺服电机驱动转动。
13.进一步的,第一光路组件包括第一立柱、上下移动连接在第一立柱上的第一激光光路组件,第一激光光路组件的两侧分别设有读码器和ccd相机,第一激光光路组件位于激光打码工位的上方。
14.进一步的,第一激光光路组件包括第一光束整形部件、与第一光束整形部件连接的第一振镜、以及与第一振镜连接的第一聚焦镜头,第一聚焦镜头与激光打码工位相对设置。
15.进一步的,第二光路组件包括第二立柱、上下移动连接在第二立柱上的第二激光光路组件,第二激光光路组件包括第二光束整形部件、与第二光束整形部件连接的第二振镜、以及与第二振镜连接的第二聚焦镜头,第二聚焦镜头与焊接工位相对设置。
16.进一步的,插入组件包括支柱、活动设置在支柱上的机械手、驱动机械手旋转的第二伺服电机、以及驱动机械手升降的第三伺服电机,机械手的下方设有插板,插板由第三气缸驱动移动。
17.进一步的,还包括下料组件,下料组件包括安装底板、设置在安装底板上的滑槽、以及与滑槽首端连接的流水线,流水线由第四伺服电机控制启动。
18.进一步的,机架上设有电控箱、与第一光路组件连接的第一激光器、与第二光路组件连接的第二激光器、以及工控机。
19.与现有技术相比,本实用新型的有益效果为:
20.(1)本实用新型的四工位旋转组件包含四个工位,上下料工位负责电子插件上料,激光打码工位负责对电子插件进行激光赋码、读码检测,组装工位负责把引脚插入到电子插件上,焊接工位负责对组装完成的电子插件进行激光焊接,四个工位的加工同时进行,待所有工位加工完成后,旋转工作台旋转90
°
,进行下一工序的加工,大大提高了生产效率。
21.(2)本实用新型通过设置第一上料组件和第二上料组件实现了电子插件的自动上下料,减少了人工操作,降低了劳动强度。
22.(3)本实用新型的第一光路组件设有ccd相机和读码器,实现了自动拍照定位和自动扫码检测的功能,有利于实现电子插件产品的智能追溯,保证加工质量。
附图说明
23.为了更清楚的说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见的,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
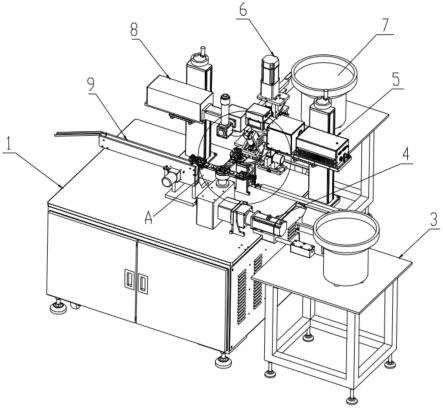
24.图1为本实用新型激光焊接打码追溯设备的整体结构图;
25.图2为图1中a部放大图;
26.图3为本实用新型激光焊接打码追溯设备的第一上料组件和第二上料组件结构图;
27.图4为本实用新型激光焊接打码追溯设备的搬运组件结构图;
28.图5为本实用新型激光焊接打码追溯设备的四工位旋转组件结构图;
29.图6为本实用新型激光焊接打码追溯设备的四工位旋转组件的侧面图;
30.图7为本实用新型激光焊接打码追溯设备的第一光路组件结构图;
31.图8为本实用新型激光焊接打码追溯设备的第二光路组件结构图;
32.图9为本实用新型激光焊接打码追溯设备的插入组件结构图;
33.图10为本实用新型激光焊接打码追溯设备的下料组件结构图;
34.图11为本实用新型激光焊接打码追溯设备的机架结构图;
35.其中:1-机架,11-电控箱,12-第一激光器,13-第二激光器,14-工控机,2-四工位旋转组件,21-旋转工作台,22-定位夹具,23-支座,24-电机,25-光电开关,26-旋转轴,3-第一上料组件,31-支撑架,32-振动盘,33-输送通道,34-直振器,4-搬运组件,41-旋转底座,42-转轴,43-转盘,431-第一延伸板,432-第二延伸板,44-第一夹板,45-第二夹板,46-第一气缸,47-第二气缸,48-第一伺服电机,49-联轴器,5-第一光路组件,51-第一立柱,52-光束整形部件,53-第一振镜,54-第一聚焦镜头,55-读码器,56-ccd相机,57-镜头,58-光源,6-插入组件,61-支柱,62-机械手,63-第二伺服电机,64-第三伺服电机,65-插板,66-第三气缸,7-第二上料组件,8-第二光路组件,81-第二立柱,82-第二光束整形部件,83-第二振镜,84-第二聚焦镜头,9-下料组件,91-安装底板,92-滑槽,93-流水线,94-第四伺服电机。
具体实施方式
36.下面将结合本实用新型中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通的技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本实用新型的保护范围。
37.下面结合附图1至附图11以及具体实施例详细论述本实用新型:
38.参见图1,本实用新型提供一种电子插件激光焊接打码追溯设备,包括机架1、设置于机架1上的四工位旋转组件2、以及分别设置于机架1相邻两侧的第一上料组件3和第二上料组件7,其中:四工位旋转组件2包括旋转工作台21,沿旋转工作台21的旋转方向依次设置有上下料工位、激光打码工位、组装工位、及焊接工位,旋转工作台21上周向间隔设置有四个定位夹具22,旋转工作台21周期的转动使得上下料工位、激光打码工位、组装工位、及焊接工位上均对应有定位夹具22,从而使得旋转工作21每转动一个角度,其上的定位夹具22都能从上一个工位转移到下一个工位,大大提高了定位夹具22在不同工位上来回转换的效率。
39.需要说明的是,本实施例中的上下料工位负责电子插件上料,激光打码工位负责对电子插件进行激光赋码、读码检测,组装工位负责把引脚插入到电子插件上,焊接工位负责对组装完成的电子插件进行激光焊接,四个工位的加工同时进行,待所有工位加工完成后,旋转工作台21旋转90
°
,对电子插件进行下一工序的加工,大大提高了生产效率。
40.具体的,本实施例中的上下料工位、激光打码工位、组装工位、及焊接工位的一侧分别对应设置有搬运组件4、第一光路组件5、插入组件6、及第二光路组件8;搬运组件4设置于第一上料组件3的输出端,用于将第一上料组件3上的待加工的电子插件转送至上下料工位、以及将加工完成的电子插件转送出去;插入组件5设置于第二上料组件7的输出端,用于将第二上料组件7上的引脚插到待加工的电子插件上;第一光路组件5用于对激光打码工位上的电子插件进行激光打码;第二光路组件8用于对焊接工位上装有引脚的电子插件进行焊接。
41.具体的,参见图5、图6,本实施例中的四工位旋转组件2还包括支座23、固定于支座23上的电机24、以及设置于旋转工作台21下方的光电开关25,旋转工作台21固定于旋转轴26上,且旋转轴26通过联轴器与电机24的输出轴连接。优选的,定位夹具22共4个,均布安装在旋转工作台21上,用于定位和装载电子插件,光电开关25也有4个,均布安装在旋转工作台21的下端,用于感应旋转工作台21是否旋转到位。
42.具体的,参见图3,本实施例中的第一上料组件3用于上料待加工的电子插件,第二上料组件7用于上料待组装的引脚,且第一上料组件3和第二上料组件7均包括支撑架31、位于支撑架31上的振动盘32、与振动盘32连通的输送通道33、以及位于输送通道33下端的直振器34;其中,支撑架31采用方管搭接,对整个上料组件起支撑承载作用,振动盘32用于把倒进振动盘里的产品有序定向排列整齐,第一上料组件3上的直振器34用于把振动盘里送出来的电子插件沿着输送通道自动送料,第二上料组件7上的直振器用于将振动盘里送出来的引脚沿着输料通道自动送料。
43.具体的,参见图4,本实施例中的搬运组件4包括固定于机架1上的旋转底座41、设置在旋转底座41上的转轴42、以及与转轴42固定连接的转盘43,其中,转轴42竖直向上设置,转盘43水平设置,转盘43上呈90
°
延伸出第一延伸板431和第二延伸板432,第一延伸板431的末端设有第一夹板44,第二延伸板432的末端设有第二夹板45,第一夹板44由第一气缸46驱动夹持,负责将电子插件上料的运送,第二夹板45由第二气缸47驱动夹持,负责电子插件下料的运送,转盘43由第一伺服电机48驱动转动,第一伺服电机48通过电机安装座安装在机架1上,第一伺服电机48的输出轴通过联轴器49与转轴42连接,带动转轴转动,从而带动转盘43往复90
°
转动。
44.具体的,参见图7,本实施例中的第一光路组件5包括第一立柱51、上下移动连接在第一立柱51上的第一激光光路组件,第一激光光路组件的两侧分别设有读码器55和ccd相机56,第一激光光路组件位于激光打码工位的上方。第一激光光路组件用于对电子插件进行激光打码;ccd相机56连接有镜头57和光源58,ccd相机56通过镜头57聚焦,并在光源58的灯光下对电子插件进行拍照定位,定位成功后发出信号,启动第一激光光路组件进行激光打码;读码器55用于对加工后的电子插件上的条形码或二维码进行扫码检测,有利于实现电子插件产品的智能追溯,保证加工质量。
45.具体的,本实施例中的第一激光光路组件包括第一光束整形部件52、与第一光束整形部件52连接的第一振镜53、以及与第一振镜53连接的第一聚焦镜头54,第一聚焦镜头54与激光打码工位相对设置。激光经过第一光束整形部件52整形,把带有细小发散角的激光光斑直径变大,变成平行激光束(或微小发散角的激光束),有利于激光传输;第一振镜控制卡控制第一振镜53内的镜片转动,改变激光束的传输方向,激光束经过第一聚焦镜头54聚焦,完成对电子插件的激光加工。
46.具体的,参见图8,本实施例中的第二光路组件8包括第二立柱81、上下移动连接在第二立柱81上的第二激光光路组件,第二激光光路组件包括第二光束整形部件82、与第二光束整形部件82连接的第二振镜83、以及与第二振镜83连接的第二聚焦镜头84,第二聚焦镜头84与焊接工位相对设置,从而实现对插入引脚的电子插件进行激光焊接。
47.具体的,参见图9,本实施例中的插入组件6包括支柱61、活动设置在支柱61上的机械手62、驱动机械手62旋转的第二伺服电机63、以及驱动机械手62升降的第三伺服电机64,
机械手62的下方设有插板65,插板65上设有第三气缸66,第三气缸66控制插板65前后运动,带动插板65上的引脚插接到电子插件上;机械手62可进行90
°
的来回摆动,负责将第二上料组件7中的引脚搬运至插板65上。
48.具体的,参见图10,本实施例还包括下料组件9,下料组件9包括安装底板91、设置在安装底板91上的滑槽92、以及与滑槽92首端连接的流水线93,流水线93由第四伺服电机94控制启动;其中,滑槽92倾斜设置,通过重力作用,实现加工完成的电子插件的自动下料,流水线93的启动实现加工完成的电子插件的自动运送至滑槽92内,安装底板91对整个下料组件起固定支撑的作用。
49.具体的,参见图11,本实施例的机架1上设有电控箱11、与第一光路组件5连接的第一激光器12、与第二光路组件8连接的第二激光器13、以及工控机14;电控箱11装有设备控制卡和电控部件,对整个设备运动控制负责,第一激光器12控制第一光路组件5出光,第二激光器13控制第二光路组件5出光,工控机14控制整个系统的软硬件。
50.本实施例还包括mes系统(智能制造系统),mes系统与ccd相机56和读码器55通讯连接,实现了电子插件产品的智能化追溯。
51.本实用新型的工作原理如下:
52.将待加工的电子插件放入第一上料组件3的振动盘中,将引脚放入第二上料组件7的振动盘中,第一上料组件3的直振器振动,使待加工的电子插件有序定向的在输送通道中输送,搬运组件4通过第一夹板44夹取输送通道输送出来的待加工电子插件,并将待加工电子插件放置于旋转工作台21上的上料工位对应的定位夹具22上,假设激光打码工位、组装工位、及焊接工位对应的定位夹具上均有对应该工序的待加工的电子插件,启动第一光路组件5、插入组件6、和第二光路组件8同时进行加工,加工完成后,旋转工作台旋转90
°
,上下料工位上的待加工电子插件转送至激光打码工位上,激光打码工位上的电子插件转送至组装工位上,组装工位上的电子插件转送至焊接工位上,焊接工位上加工完成的电子插件转送至上下料工位上,加工完成的电子插件通过搬运组件4上的第二夹板45传送至下料组件上,同时搬运组件4上的第一夹板44继续上料,第一光路组件5、插入组件6、第二光路组件8同步进行加工,以此循环。
53.在本实用新型中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本实用新型。
54.以上借助具体实施例对本实用新型做了进一步描述,但是应该理解的是,这里具体的描述,不应理解为对本实用新型的实质和范围的限定,本领域内的普通技术人员在阅读本说明书后对上述实施例做出的各种修改,都属于本实用新型所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1