一种柔性电路板表面贴装用焊接装置的制作方法
1.本实用新型涉及电路板生产技术领域,具体为一种柔性电路板表面贴装用焊接装置。
背景技术:
2.柔性电路板是以聚酰亚胺或聚酯薄膜为基材制成的一种具有高度可靠性,绝佳可挠性的印刷电路板,其具有配线密度高、重量轻、厚度薄、弯折性好的特点。近几年已经取得了较大的发展,尤其在移动电话、电脑与液晶荧幕、cd随身听、磁碟机、硬盘驱动器和无线充电线圈阵列等领域得到了广泛的应用。随着柔性电路板的市场和应用范围的扩大,对于柔性电路板的需求量也随之增大,随之而来的问题就是如何高效低成本的完成柔性电路板的制造与加工。在柔性电路板的加工过程中,都需要将柔性电路板与载板贴合,
3.而现有的技术中对于柔性电路板与载板的贴合大都采用人工操作的方式,采用人工贴合不仅耗费大量的人力资源,提高了柔性电路板的加工成本,同时,人工贴合操作效率很低,贴合效果差,误差较大,产生大量的不合格产品,极大的提高了加工成本。
技术实现要素:
4.本实用新型旨在解决现有技术或相关技术中存在的技术问题之一。
5.为此,本实用新型所采用的技术方案为:一种柔性电路板表面贴装用焊接装置,包括:贴装控制机柜以及位于贴装控制机柜内部的焊接运动机台、机头平移组件、焊接机头和z轴运动组件,所述焊接运动机台包括侧运动轨、牵引轨和焊接承载台,所述牵引轨的表面活动安装有牵引组件,所述侧运动轨和牵引轨的数量均为两个且首尾垂直连接组合呈矩形结构,所述焊接承载台的两端与侧运动轨的内侧固定连接,所述机头平移组件包括x轴运动组件、横轨架和y轴运动组件,所述x轴运动组件和y轴运动组件分别活动安装于侧运动轨和横轨架的表面,所述z轴运动组件固定安装于y轴运动组件的表面,所述焊接机头固定安装于z轴运动组件的输出端。
6.本实用新型在一较佳示例中可以进一步配置为:所述牵引组件的底面设有牵引运动架,所述牵引运动架、x轴运动组件和y轴运动组件的结构相同均包括有夹板、驱动电机和运动辊轮,所述运动辊轮转动安装于夹板的内侧,所述驱动电机固定安装于夹板的一侧,所述驱动电机的输出端与运动辊轮的表面皮带传动连接。
7.通过采用上述技术方案,通过牵引组件和机头平移组件组建焊接机头的二维平面移动结构,可根据柔性电路板位置进行移动进行点焊贴装。
8.本实用新型在一较佳示例中可以进一步配置为:所述横轨架、侧运动轨和焊接承载台为铝合金型材结构,所述横轨架、侧运动轨和焊接承载台的表面均设有滑轨槽,所述横轨架的两端固定套接有固定于x轴运动组件表面的横轨连耳,所述横轨架呈垂直侧运动轨的方向布置且位于焊接承载台的上方。
9.通过采用上述技术方案,通过横轨连耳和横轨架搭建焊接机头的横向运动轨道,
进行多股柔性电路板的焊接。
10.本实用新型在一较佳示例中可以进一步配置为:所述z轴运动组件包括丝杆驱动组件、导轨和运动板,所述焊接机头固定安装于运动板表面,且运动板的一侧固定安装有丝杆套,所述丝杆驱动组件固定安装与导轨的表面,所述导轨呈垂直焊接承载台的方向布置。
11.通过采用上述技术方案,利用z轴运动组件的丝杆驱动进行焊接机头的升降运动从而配合焊接机头进行点焊,实现自动化焊接贴装。
12.本实用新型在一较佳示例中可以进一步配置为:所述牵引组件的数量为若干,所述牵引组件的表面设有相互抵接的牵引胶辊,且牵引胶辊的内侧设有外转子电机。
13.通过采用上述技术方案,利用多个牵引组件实现若干组柔性电路板的牵引运动,牵引组件牵引电路板运动通过焊接机头下方,从而实现连续式封装焊接。
14.本实用新型在一较佳示例中可以进一步配置为:所述牵引组件、机头平移组件、焊接机头和z轴运动组件的输入端电性连接有plc控制器,且plc控制器的端部电性连接有固定于贴装控制机柜外侧的控制面板,所述控制面板包括输入面板和显示器。
15.通过采用上述技术方案,通过plc控制器的可编程式操作控制,自动控制牵引组件、机头平移组件、z轴运动组件的运动进量实现数控化操作。
16.本实用新型所取得的有益效果为:
17.1.本实用新型中,通过设置自动化多轴运动结构,利用焊接运动机台搭建多轴运动平台并通过牵引组件、机头平移组件和z轴运动组件分别实现柔性电路板和焊接机头的机械运动,实现z轴运动组件的三维空间运动从而进行贴装针脚的自动化精确焊接,显著提高贴装焊接效率。
18.2.本实用新型中,通过设置牵引组件结构,利用多个牵引组件实现若干组柔性电路板的牵引运动,牵引组件牵引电路板运动通过焊接机头下方,从而实现连续式封装焊接,无需人工递料,实现自动化操作。
附图说明
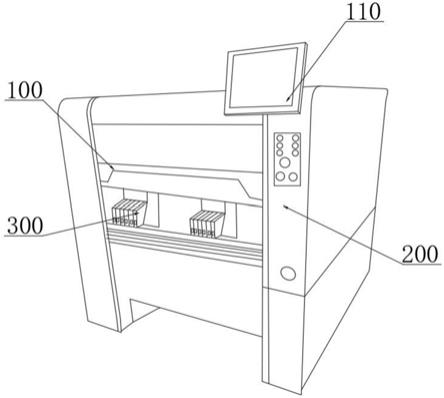
19.图1为本实用新型一个实施例的整体结构示意图;
20.图2为本实用新型一个实施例的焊接运动机台和焊接机头安装结构示意图;
21.图3为本实用新型一个实施例的x轴运动组件安装结构示意图;
22.图4为本实用新型一个实施例的x轴运动组件结构示意图;
23.图5为本实用新型一个实施例的焊接机头和z轴运动组件结构示意图。
24.附图标记:
25.100、贴装控制机柜;110、控制面板;
26.200、焊接运动机台;210、侧运动轨;220、牵引轨;230、焊接承载台;
27.300、牵引组件;310、牵引运动架;
28.400、机头平移组件;410、x轴运动组件;420、横轨架;430、y轴运动组件;411、夹板;412、驱动电机;413、运动辊轮;421、横轨连耳;
29.500、焊接机头;600、z轴运动组件。
具体实施方式
30.为使本实用新型的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本实用新型进一步详细说明。需要说明的是,在不冲突的情况下,本实用新型的实施例及实施例中的特征可以相互组合。
31.该理解,这些描述只是示例性的,而并非要限制本实用新型的范围。
32.下面结合附图描述本实用新型的一些实施例提供的一种柔性电路板表面贴装用焊接装置。
33.结合图1-5所示,本实用新型提供的一种柔性电路板表面贴装用焊接装置,包括:贴装控制机柜100以及位于贴装控制机柜100内部的焊接运动机台200、机头平移组件400、焊接机头500和z轴运动组件600,焊接运动机台200包括侧运动轨210、牵引轨220和焊接承载台230,牵引轨220的表面活动安装有牵引组件300,侧运动轨210和牵引轨220的数量均为两个且首尾垂直连接组合呈矩形结构,焊接承载台230的两端与侧运动轨210的内侧固定连接,机头平移组件400包括x轴运动组件410、横轨架420和y轴运动组件430,x轴运动组件410和y轴运动组件430分别活动安装于侧运动轨210和横轨架420的表面,z轴运动组件600固定安装于y轴运动组件430的表面,焊接机头500固定安装于z轴运动组件600的输出端。
34.在该实施例中,牵引组件300的底面设有牵引运动架310,牵引运动架310、x轴运动组件410和y轴运动组件430的结构相同均包括有夹板411、驱动电机412和运动辊轮413,运动辊轮413转动安装于夹板411的内侧,驱动电机412固定安装于夹板411的一侧,驱动电机412的输出端与运动辊轮413的表面皮带传动连接。
35.具体的,通过牵引组件300和机头平移组件400组建焊接机头500的二维平面移动结构,可根据柔性电路板位置进行移动进行点焊贴装。
36.在该实施例中,横轨架420、侧运动轨210和焊接承载台230为铝合金型材结构,横轨架420、侧运动轨210和焊接承载台230的表面均设有滑轨槽,横轨架420的两端固定套接有固定于x轴运动组件410表面的横轨连耳421,横轨架420呈垂直侧运动轨210的方向布置且位于焊接承载台230的上方,通过横轨连耳421和横轨架420搭建焊接机头500的横向运动轨道,进行多股柔性电路板的焊接。
37.在该实施例中,z轴运动组件600包括丝杆驱动组件、导轨和运动板,焊接机头500固定安装于运动板表面,且运动板的一侧固定安装有丝杆套,丝杆驱动组件固定安装与导轨的表面,导轨呈垂直焊接承载台230的方向布置。
38.具体的,利用z轴运动组件600的丝杆驱动进行焊接机头500的升降运动从而配合焊接机头500进行点焊,实现自动化焊接贴装。
39.在该实施例中,牵引组件300的数量为若干,牵引组件300的表面设有相互抵接的牵引胶辊,且牵引胶辊的内侧设有外转子电机。
40.具体的,利用多个牵引组件300实现若干组柔性电路板的牵引运动,牵引组件300牵引电路板运动通过焊接机头500下方,从而实现连续式封装焊接,无需人工递料,实现自动化操作。
41.在该实施例中,牵引组件300、机头平移组件400、焊接机头500和z轴运动组件600的输入端电性连接有plc控制器,且plc控制器的端部电性连接有固定于贴装控制机柜100外侧的控制面板110,控制面板110包括输入面板和显示器。
42.具体的,利用焊接运动机台200搭建多轴运动平台并通过牵引组件300、机头平移组件400和z轴运动组件600分别实现柔性电路板和焊接机头500的机械运动,实现z轴运动组件600的三维空间运动从而进行贴装针脚的自动化精确焊接,通过plc控制器的可编程式操作控制,自动控制牵引组件300、机头平移组件400、z轴运动组件600的运动进量实现数控化操作。
43.在本实用新型中,术语“多个”则指两个或两个以上,除非另有明确的限定。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
44.需要说明的是,当元件被称为“装配于”、“安装于”、“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
45.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
46.尽管已经示出和描述了本实用新型的实施例,本领域的普通技术人员可以理解,在不脱离本实用新型的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1