用于分析激光焊接过程的方法和激光加工系统与流程
1.本发明涉及一种用于分析激光焊接过程的方法,尤其用于分析激光焊接过程的结果或通过激光焊接过程产生的焊缝的方法,以及一种用于执行该方法的激光加工系统。
背景技术:
2.在借助激光束加工工件的激光加工系统中,从激光源或激光光纤一端射出的激光束借助射束引导和聚焦光学器件聚焦或聚束到待加工的工件上,以便将工件局部加热到熔化温度。该加工尤其可以包括激光焊接。激光加工系统可以包括一个激光加工装置,例如激光加工头、尤其是激光焊接头。
3.为确保加工质量,需要对激光焊接的结果、尤其焊接的工件之间的焊接连接部进行分析或检查。这包括焊接缺陷的识别。根据分析结果,焊接的工件可被标记为“良好”或“良好焊接”(即适用于进一步加工或销售)或“差”或“不良焊接”(即次品)。尤其,如果没有焊接缺陷,则可以将焊接的工件标记为“良好”,如果存在焊接缺陷,则可以将焊接的工件标记为“差”。在激光焊接工件、尤其是板材时,证明焊接缺陷是一项重大挑战。
4.申请de 10 2019 122 047描述了一种用于监控激光焊接过程的传感器模块,该传感器模块具有多个探测器或传感器,探测过程辐射的不同参数并且将其作为测量信号输出。
5.申请de 10 2020 104 462描述了一种用于在激光焊接工件时分析焊接连接部的方法。该方法在激光焊接过程中执行并且除了由工件反射的激光辐射外,还基于对等离子体辐射或温度辐射的感测和分析评估。因此可以识别出连接的工件之间是否存在间隙,以及工件之间是否形成焊接连接、尤其是电接触。
6.然而,这种方法视材料组合和板材厚度而定达到了其极限。此外,这种方法不允许可靠地探测某些缺陷图像,例如具有非常小尺寸的间隙。
7.电池在电动汽车领域起核心作用。单个电池单体,也被称为“蓄单池单体”,在此相互连接,即接触。多个电池单体的组合称为“电池模块”。通常,连接通过激光焊接进行。在此,例如电池单体的导电体(ableiter)相互焊接,通常以搭接的方式。焊缝例如具有所谓的“i型缝”的几何形状。材料通常是铝和铜。典型的连接或材料组合是铜-铜、铝-铝和铜-铝或铝-铜。为了将电池单体连接到电池模块和因此成功地构建模块,需要在电池单体的焊接的零件之间存在电接触,例如电导体,即电流可以在焊接的零件之间或通过焊缝流动。只有在这种情况下,接触才会成功。
8.在借助激光焊接工件时,尤其在具有i型缝的搭接处,会出现典型的缺陷图像或加工缺陷。这些包括焊接的工件之间的间隙。该缺陷会对工件之间的焊缝质量产生不同影响。即使通过小的间隙也会降低焊缝或者说两个工件之间连接部的机械稳定性。焊接的工件之间的间隙也可以导致不再确保焊接的工件之间的电接触。
9.对于一些焊接应用,如果间隙小并且焊接的工件之间仍存在足够稳定的机械或电连接,该缺陷是可以容忍的。在其他焊接任务中,例如,如果间隙被工件的熔化材料桥接,即
尽管存在间隙,但仍存在焊接连接,尤其在焊接的工件之间存在电接触,则缺陷可以容忍。这种情况也被称为“具有间隙桥接的焊接”或“具有(电)连接的间隙”。
10.另一典型的缺陷图像称为“假朋友(false friend)”。在此,在工件之间存在间隙,其中,间隙没有被桥接,因此在待焊接的工件之间没有(电)接触。这也称为“无间隙桥接的焊接”或者说“无(电)连接的间隙”。
11.因此,加工缺陷的识别对于焊接的工件或焊缝的质量是决定性的。没有加工缺陷的焊接也可以称为“良好焊接”。具有(不可容忍的)加工缺陷的焊接可以称为“不良焊接”。在执行激光焊接过程之后对焊缝或焊接工件进行纯视觉检查时,不可能从俯视图中识别是否存在加工缺陷以及哪种缺陷,或者不能区分是良好焊接还是不良焊接。
技术实现要素:
12.本发明的任务是给出一种方法和用于执行该方法的激光加工系统,借助其可以简单且快速地分析或评价激光焊接过程、尤其是激光焊接过程的结果。
13.本发明的另一任务是给出一种方法和用于执行该方法的激光加工系统,借助其可以简单且快速地确定,是否存在焊接缺陷或在两个工件之间是否存在焊接连接、尤其是电接触。尤其,本发明的任务是给出一种方法以及用于执行该方法的激光加工系统,其能够简单而快速地分类或区分良好焊接和不良焊接。
14.这些任务通过独立权利要求的内容来解决。有利的构型和扩展方案是从属权利要求的内容。
15.本发明基于通过分析测量射束从焊缝逆反射或逆散射来评价焊缝的质量以及是否存在焊接缺陷的构思。通过记录和评价测量射束的逆反射,例如借助光电二极管可以分析焊缝的拓扑结构或表面特性,以便确定是否存在焊接缺陷,或区分具有连接或电接触的焊缝,即焊接连接部,和没有连接或没有电接触的焊缝(假朋友),从而可以区分出良好焊接和不良焊接。良好焊接可以定义为没有焊接缺陷的焊接连接部或者说焊缝。不良焊接可定义为具有焊接缺陷的焊接连接部或者说焊缝。
16.焊接缺陷可以包括以下至少一种缺陷:工件之间的有缺陷的焊接连接部,工件之间的间隙以及假朋友。焊接连接部可以在工件之间产生或表示接触、尤其是电接触。可以识别和区分具有间隙和间隙桥接的焊接连接部或者说焊缝以及具有间隙,但没有间隙桥接的焊接连接部或者说焊缝(假朋友)。
17.根据本发明的一个方面,给出一种用于分析激光焊接过程的方法,尤其用于分析通过激光焊接过程产生的焊缝。该方法包括以下步骤:通过将具有第一激光功率的激光束照射到至少一个待焊接的工件上形成焊缝;将具有第二激光功率的激光束照射到焊缝上,其中,第二激光功率小于第一激光功率;感测对于以第二激光功率照射的激光束从焊缝反射或逆散射的部分的测量信号;并且基于测量信号确定在工件之间是否存在焊接连接部。具有第一激光功率的激光束和具有第二激光功率的激光束可以来自同一激光源。因此,具有第二激光功率的激光束的照射优选地在具有第一激光功率的激光束照射之后或在形成焊缝之后进行。尤其,具有第二激光功率的激光束的照射可以在焊缝的冷却和/或凝固的区域上进行。
18.根据本发明的另一方面,给出一种用于分析激光焊接过程的方法,尤其用于分析
通过激光焊接过程产生的焊缝。该方法包括以下步骤:通过将具有第一激光功率的激光束照射到至少一个待焊接的工件上形成焊缝;将测量射束照射到已形成的焊缝或焊缝的(已经)形成的区域上;感测对于测量射束从焊缝反射或逆散射的部分的测量信号;并且基于测量信号确定是否存在焊接缺陷。因此,测量射束的照射优选地在具有第一激光功率的激光束的照射之后或在焊缝(至少部分地)形成之后进行。尤其,测量射束的照射可以在焊缝的冷却和/或凝固区域上进行。该方法可以称为后处理方法,该方法优选地直接衔接于用于形成焊缝的激光焊接过程。测量射束尤其可以是一激光束。具有第一激光功率的激光束和测量射束可以来自同一激光源或具有相同的波长。在这种情况下,测量射束的第二激光功率优选地比第一激光功率更低。
19.测量射束可以有任意波长,尤其在红外线范围内的波长或可见的绿色或蓝色范围内的波长。尤其,测量射束可以是一激光束,例如来自与用于加工工件的激光束相同的激光源的激光束(也称为加工激光束),或来自波长约为630nm或约为530nm的先导激光源。替代地,测量射束也可以包括led光或由led产生。优选地,测量射束的射束路径的至少一部分与激光加工过程中的加工激光束的射束路径同轴。
20.因此,该方法包括将具有第一激光功率的激光束照射到一个或多个工件上,以便将工件相互焊接。在此,在至少一个工件上形成焊缝,以便连接这些工件。在下一个步骤中,测量射束,例如具有第二激光功率的激光束照射到所产生的焊缝上。在此,第二激光功率可以比第一激光功率更低或更小。替代地,测量射束如上所述也可以是led光。同时,对于测量射束从焊缝反射的部分感测到的测量射束也可以称为“传感器信号”。换言之,借助传感器(如光电二极管)探测或测量测量射束从焊缝反射的部分或从焊缝反射的测量射束的强度,并且在此基础上产生测量信号。基于该测量信号然后确定是否存在焊接缺陷。以第一激光功率照射的激光束也可以称为加工激光束。
21.根据本发明,能够通过测量或探测和分析评估从焊缝反射的测量辐射,尤其反射的激光辐射区分或分类良好焊接和不良焊接。为此,在实际激光焊接过程完成之后,尤其在焊缝冷却或凝固之后,可以用测量射束再次越过或移过焊缝,即将激光束再次对准或照射到焊缝上,其中,作为测量射束使用的激光束,即重新照射的激光束,具有比在实际激光焊接过程中的激光功率更低的激光功率,从而激光束或激光功率仅被反射或散射回,并且尽可能少地或没有耦合到工件或焊缝中。测量射束基本上是反射或逆散射的,并且尽可能少地或没有耦合到工件或焊缝中。过强的耦合可能会导致材料的重新改性或熔化。然后,从焊缝反射的测量辐射的强度可以用于分析焊缝。
22.如发明人所发现的那样,良好焊接或无焊接缺陷的焊接的焊缝或者说焊道的拓扑结构与不良焊接或具有焊接缺陷的焊接的焊缝或者说焊道的拓扑结构不同:在良好焊接中的焊道的粗糙度高,而在不良焊接中低。替代地或附加地,良好焊接和不良焊接在焊缝表面的曲率形状上可能有区别。例如,简化地表达,即焊缝表面的曲率在没有间隙的良好焊接中可以是凸形的,而在具有间隙的不良焊接中可以是平面的,甚至是凹形的。因此,测量射束从焊缝或者说焊道反射的部分,也称为“逆反射”或“反射的测量辐射”,在良好焊接的情况下比在不良焊接的情况下更低。换言之,反射的测量辐射的强度在存在良好焊接时比在存在不良焊接时更低。基于这些认识,通过照射到焊缝上的测量射束和通过探测照射的测量射束从焊缝反射的部分的强度,可以区分良好焊接和不良焊接。
23.因此,根据本发明的方法可以区分良好焊接和不良焊接。在良好焊接的情况下,不存在之前提到的焊接缺陷。尤其,在良好焊接的情况下,能够在连接的工件之间存在焊接连接部。该焊接连接部可以表示电和/或机械(即物理)的焊接连接部,即在工件之间存在电或机械接触。良好焊接可以包括在焊接的工件之间没有间隙的情况(所谓的“零间隙”)和存在间隙,但被桥接的情况(具有连接部的焊接)。不良焊接可以包括在焊接的工件之间存在间隙,但没有桥接的情况(无连接的焊缝)。因此,该方法可以用于分析通过激光过程产生的焊缝或借助激光束焊接的电连接,用于识别在连接的工件之间是否缺失电接触,例如在将电池单体连接至电池模块时。
24.因为确定是否存在焊接缺陷优选地在实际激光焊接之后进行,所以根据本发明的方法可以称为“后处理方法”或简称“后方法”。
25.优选地,该方法还可以包括:当确定不存在焊接缺陷或者说存在焊接连接部时,将通过激光焊接连接的工件评价或标记为“良好”或“合格件”;当确定存在焊接缺陷或不存在焊接连接部时,将其评价或标记为“不良”或“不合格件”。在此基础上,后续的激光焊接过程可以被调节或控制。例如,加工参数如供应的激光功率、激光加工设备与工件的距离、用于激光焊接的激光束的焦点位置和/或聚焦位置等,可以对下一个激光焊接过程进行适配或调节。该方法可以进一步包括当确定存在焊接缺陷时输出对于工件的缺陷和/或当确定存在焊接缺陷时输出对于工件的警告。
26.测量信号可以相应于测量射束的反射部分的辐射强度。换言之,测量信号可以基于测量或探测反射部分的辐射强度。因此,测量射束和测量射束的作为测量信号感测到的反射部分可以具有相同的波长。尤其,以第一激光功率照射的激光束、测量射束和测量射束的作为测量信号感测到的反射部分可以具有相同的波长。对反射部分的辐射强度的测量或探测可以借助至少一个光电二极管进行。光电二极管可以在包括测量射束波长的波长范围内具有光谱灵敏度。光电二极管可以在测量射束的波长处具有最大的光谱灵敏度。测量信号可以是数字的。测量信号可以包括多个测量值,这些测量值分别配属于时间点和/或在工件或焊接表面上的位置。测量信号可以是时间上可变的。
27.测量射束的照射和/或测量信号的感测可以沿着测量路径进行。激光束的照射可以沿着预给定的路径进行,即所谓的加工或焊接路径,关于工件,尤其关于一个或多个工件的表面。测量射束的照射和/或测量信号的感测可以沿着同一预给定的路径进行。换言之,焊接路径和测量路径可以是相同的。测量射束的照射可以包括通过测量射束对焊缝进行追踪。换言之,测量射束在追踪焊缝时照射到焊缝上。测量射束的照射和/或测量信号的感测可以在焊缝上或从焊缝的一点或至少部分地沿着和/或横向于焊缝进行。测量射束沿着测量路径的照射或通过测量射束对焊缝进行追踪可以如激光束照射用于形成焊缝那样关于工件或焊缝以相同或不同的速度,也称为“进给速度”进行。
28.如果焊接缺陷是缺失焊接连接部,并且如果测量射束的照射和/或测量信号的感测至少部分地沿着焊缝进行,则由此可以将沿着焊缝的存在焊缝的区域与沿着焊缝的不存在焊缝的区域区分开。因此,根据实施方式可以基于测量信号确定是否至少在工件之间沿着焊缝的区域中存在焊接连接部。如果已经确定至少在工件之间沿着焊缝的区域中存在焊接连接部,则可以因此确定在工件之间存在焊接连接部。换言之,可以包括基于测量信号确定在工件之间是否存在焊接连接部、确定沿着焊缝的存在焊接连接的第一区域和确定沿着
焊缝的不存在焊接连接的第二区域。因此,可以对不均匀焊缝进行分析,其中存在具有焊接连接的区域和无焊接连接、尤其是无电接触的区域。此外,借助根据本发明的方法,可以沿着焊缝定位其它焊接缺陷、尤其是“假朋友”。通过分析评估具有连接和无连接的部分,可以估计物理特征值,如强度或绝对电导率。
29.优选地,将测量射束照射到应确定是否存在焊接缺陷的焊缝区域上。例如,测量射束可以照射到工件重叠的重叠区域中的焊缝上。因此,测量路径可以包括一个重叠区域,在该重叠区域中,工件发生重叠。测量路径还可以包括位于重叠区域外和/或焊缝外的区域。来自该区域的测量信号例如可以用于确定从工件或焊缝反射的测量辐射强度的参考值。优选地,测量路径包括在第一工件上的第一区域、焊缝和在第二工件上的第二区域,第二工件已经或将要与第一工件焊接。当测量路径沿着焊缝延伸时,优选是这种情况。替代地,测量路径可以包括在工件上的第一区域、焊缝和在工件上的第二区域。当测量路径横向于焊缝延伸时,优选是这种情况。
30.用于加工和/或以第一激光功率照射的激光束和/或测量射束可以包括在红外光谱范围内的波长,尤其在1030nm至1070nm之间,或在可见的绿色光谱范围内,尤其在500nm至570nm之间,优选为515nm的波长,和/或在可见的蓝色光谱范围内,尤其在400nm至500nm之间,或在440nm至460nm之间,优选为450nm的波长。换言之,可以使用在红外光谱或波长范围内发射的激光源。替代地,可以使用在绿色或蓝色光谱或波长范围内发射的激光源。尤其,以第一激光功率照射的激光束和测量射束可以来自同一激光源或由同一激光源产生。测量射束也可以是先导激光束或led灯。因此,以第一激光功率照射的激光束和测量射束可以具有相同或不同的波长。
31.如果测量射束是激光束,则可以选择第二激光功率,使得测量射束基本上完全被工件或焊缝反射。优选地,第二激光功率小于用于加工工件的激光功率和/或测量射束的进给速度等于或大于以第一激光功率照射而形成焊缝的激光束的进给速度。第二激光功率和/或测量射束的进给速度可以如此选择,使得测量射束不耦合到工件中。在适当选择第二激光功率的情况下,测量射束的进给速度也可以小于以第一激光功率照射的激光束的进给速度,例如以便收集足够的数据用于分析。换言之,测量射束在工件表面或焊缝表面上的功率密度可以如此调整,使得其低于测量射束耦合到工件中或工件熔化的阈值。尤其可以选择第二激光功率和测量射束的横截面,使得在工件表面或焊缝表面产生的功率密度低于测量射束耦合到工件中或熔化工件的阈值。换言之,测量射束进入到工件表面中的局部输入可以如此低,使得其不导致工件熔化和/或激光束没有耦合到工件中。第二激光功率可以在1w至1kw之间,优选在5w至300w之间,特别优选在5w至200w之间,尤其为200w。如果测量射束来自先导激光源,则第二激光功率可以小于20w,尤其小于1w,甚至在1mw至10mw之间。优选地,测量射束以激光源的连续波(cw)运行模式照射。第一和/或第二激光功率可以给定平均激光功率。
32.在一个实施方式中,基于来自焊缝的测量信号,确定是否存在焊接缺陷或在工件之间是否存在焊接连接部。换言之,优选地使用测量信号的相应于焊缝或重叠区域的区域用于分析焊缝。例如,基于来自焊缝的测量信号的噪声部分可以确定是否存在焊缝缺陷。
33.在一个实施方式中,如果测量信号或测量信号的噪声部分高于参考值或参考走势(也称为“参考曲线”),则确定存在焊接缺陷。这也可以称为测量信号或噪声部分的增加。参
考值或参考曲线可以基于工件的材料和/或厚度预给定,换言之,参考值或参考曲线可以取决于工件的材料或厚度。参考曲线尤其可以是预给定的时间或空间上的参考曲线。参考曲线可以是一个预给定的下包络曲线。尤其,参考曲线可以沿着焊缝和/或沿着测量路径预给定。
34.确定是否存在焊接缺陷可以包括对测量信号或测量信号的噪声部分求积分。在一个实施方式中,如果积分超过预给定的积分极值,则确定存在焊接缺陷,如果积分低于预给定的积分极值,则确定不存在焊接缺陷。可以对测量信号或噪声部分的相应于焊缝或包括焊缝一部分的区域求积分。在另一实施方式中,可以对测量信号或噪声部分的至少一个区域求积分,在该区域中,测量信号或噪声部分仅高于和/或仅低于预给定的积分参考值。测量信号或噪声部分的至少一个区域可以包括测量信号或噪声部分的全部或局部极值,即最大值或最小值并且也可以称为测量信号或噪声部分的“峰值”。根据实施方式,如果在测量信号或噪声部分仅高于和/或仅低于预给定的积分参考值的区域上的积分之和超过预给定的积分极值,则可以确定存在焊接缺陷。根据实施方式,这些积分中的一个积分也可以确定为具有最大值,即最大积分。然后可以确定,如果该最大的积分超过预给定的积分极值,则存在焊接缺陷。
35.替代地或附加地,确定是否存在焊接缺陷可以包括对测量信号或噪声部分求平均。可以至少对测量信号或噪声部分的一部分求平均,例如,对相应于重叠区域或焊缝的部分。在这种情况下,如果平均值超过了预给定的平均值极限,则可以确定存在焊接缺陷。
36.替代地或附加地,确定是否存在焊接缺陷可以包括求取测量信号的异常值频率。异常值频率也可以称为“缺陷频率”。在这种情况下,如果测量信号的异常值频率超过预给定的异常值极限,则可以确定存在焊接缺陷。异常值频率可以对测量信号的至少一个区域求取。异常值频率可以定义为测量信号的频率或数值的位于测量信号的预给定包络线外的频次。异常值频率可以给定关于所考虑的和/或预给定的时间间隔或测量间隔的百分比,或关于测量信号的所考虑的和/或预给定区域的百分比。替代地,可以以绝对值形式给定异常值频率。
37.上述的参考值、参考曲线和极值可以根据或基于待确定的焊接缺陷或焊接任务预给定。例如可以为了确定是否存在间隙而预给定与用于确定是否存在无间隙桥接的间隙,即假朋友不同的参考值。
38.根据实施方式,该方法包括对测量信号的预处理,尤其对测量信号进行平滑和/或过滤,尤其对测量信号中的噪声部分进行过滤。
39.根据本发明的方法可以尤其用于以搭接或平行对接的方式进行激光焊接。换言之,在激光束以第一激光功率照射时,工件可以以搭接或平行对接的方式,即以重叠的几何形状布置。接缝几何形状优选地是i型缝或搭接缝。
40.至少一个工件可以包括或由铝、钢、铜、(优选电镀的)具有镍涂层的铜和/或镍或者由它们构成。
41.至少一个工件可以具有在0.05mm至5mm之间、在1mm至5mm之间、在0.1mm至1mm之间、在0.05mm至0.5mm之间,约0.07mm的厚度,在0.2mm至0.4mm之间或约0.3mm的厚度。
42.优选地,根据本发明的方法用于电池接触,以确定是否存在电连接。工件可以包括第一电池单元的一部分、尤其是电导体,以及第二电池单元的一部分、尤其是电导体。因此,
焊缝可以在电池连接器之间和/或母线之间形成。作为焊接连接部可以分析电池单体的零件之间、尤其导电体之间的焊接的电接触。第一电池单体和/或第二电池单体可以构造为袋形电池单体、棱柱形电池单体或圆柱形电池单体或可以包括这些电池单体中的至少一种。尤其,电池单体可以构造为袋形电池单体。在这种情况下,一个电池单体的部分可以包括铝,而另一电池单体的部分可以包括铜,其中,后者可以选择性地涂覆镍(层厚度例如8μm)。替代地,一个电池单体的部分和另一电池单体的部分都可以由相同的材料,例如铜或铝构成。涂层可以电镀地施加。电池单体的部分的厚度可以在0.2mm至0.4mm之间。此外,电池单体可以构造为棱柱形电池单体。在这种情况下,一个电池单体的部分和另一电池单体的部分都可以由相同的材料,例如铝构成。两个电池单体的部分的厚度可以在1mm至5mm之间。此外,电池单体可以构造为圆柱形电池单体。在这种情况下,一个电池单体的部分可以由或铝构成,而另一电池单体的部分可以由铝或铜构成,其中,后者可以选择性地涂覆镍(层厚度例如8μm)。涂层可以电镀地施加。两个电池单体的部分的厚度可以在0.4mm至0.5mm之间。
43.根据本发明的另一方面,给出一种用于分析通过激光焊接过程形成的焊缝的激光加工系统。上述根据本发明的方法可以由激光加工系统执行,该激光加工系统包括用于借助激光束加工工件的激光加工设备、尤其是激光焊接头,以及传感器模块。
44.激光加工系统为了分析通过激光焊接过程形成的焊缝可以包括:激光加工头、尤其是激光焊接头,用于将激光束和/或测量射束照射到工件上;传感器模块,用于感测测量射束从焊缝反射的部分;以及控制装置,其设置为用于控制激光加工系统,以便执行根据本公开的一个实施方式的方法。
45.激光焊接头可以构造为所谓的固体光学激光焊接头或所谓的扫描激光焊接头。扫描激光焊接头可以具有一个偏转单元,用于在工件上偏转激光束。偏转单元可以具有一个扫描光学器件、扫描系统、扫描镜和/或电流扫描仪(galvano-scanner)。在固体光学激光焊接头中,激光束可以通过激光焊接头的运动本身而相对于工件运动,或者工件相对于激光焊接头运动。
46.传感器模块包括至少一个探测器,用于探测反射的激光辐射。探测器可以设置为用于探测在特定波长范围内的强度。此外,探测器可以设置为用于基于探测输出测量信号。探测器可以包括至少一个光电二极管和/或光电二极管阵列和/或摄像头,例如基于cmos或ccd的摄像头。探测器可以仅在特定的波长或特定的波长范围内是敏感的。例如,探测器可以在测量射束的波长范围内或在激光加工设备的激光发射波长范围内是敏感的。根据一个实施方式,传感器模块包括具有至少一个光电二极管的探测器,该探测器在测量射束的波长范围内或激光发射波长范围内是敏感的,以便探测逆反射的测量辐射。因此,借助激光加工系统可以执行根据本发明的方法。尤其可以通过所述传感器模块感测测量信号。
47.根据实施方式,传感器模块或探测器可以耦合到激光加工设备上。激光加工设备可以具有分束器,用于将反射辐射从激光束的射束路径解耦。激光加工设备可以包括一个用于解耦辐射的光学输出端,而传感器模块可以包括一个用于耦合由激光加工设备解耦的辐射的光学输入端。辐射可以包括测量射束从焊缝反射的部分或可以是测量射束从焊缝反射的部分。传感器模块或探测器或光电二极管可以沿着激光加工设备的光轴或者说激光束的传播方向布置或与其同轴。换言之,工件和探测器之间的反射测量辐射的射束路径至少
部分地在激光加工设备内延伸和/或与激光束的射束路径同轴。替代地,传感器模块或探测器如此布置,使得工件和探测器之间的射束传播方向或反射测量辐射的射束路径完全在激光加工设备外延伸。
48.根据实施方式,传感器模块可以替代地或附加地在激光加工设备内,即在激光加工设备的内部空间或光学空间内具有至少一个探测器。为此,分束器或扫描镜可以将反射的测量辐射偏转到探测器上。替代地,加工激光束的射束路径可以成角度,而用于反射测量辐射的射束路径可以是直线的。
49.根据另外的实施方式,激光加工系统可以包括用于产生具有第一和/或第二激光功率的激光束的激光源和/或用于产生测量射束的测量射束源。根据另外的实施方式,传感器模块可以替代地或附加地包括激光源中的至少一个探测器。换言之,传感器模块可以具有一个激光器内部的探测器。在这种情况下,反射的测量辐射可以通过激光加工设备的光学元件耦合到光纤中,用于引导由激光源产生的激光束,并且在激光源中作用到探测器上。
50.此外,激光加工系统可以包括控制单元。控制单元可以设置为用于接收来自至少一个探测器的模拟测量信号。控制单元可以设置为用于执行根据本发明的实施方式之一的方法,以便分析激光焊接过程或焊缝。控制单元还可以设置为用于基于分析结果、尤其是否存在焊接缺陷,如上所述地调节或控制激光加工系统、尤其是激光加工设备。
51.测量射束可以具有任意波长,尤其在红外线范围内的波长或在可见的绿色或蓝色范围内的波长。激光加工系统可以包括用于加工工件的激光束(也称为加工激光束)的激光源。激光源可以设置为用于产生测量射束。在这种情况下,测量射束可以是比用于材料加工的激光束具有更低功率的激光束。测量射束可以是先导激光束。在这种情况下,激光加工系统可以包括先导激光源,例如用于产生具有约630nm或约530nm波长的先导激光束。替代地或附加地,激光加工系统可以包括用于产生测量射束的led源。由led源产生的测量射束或led光可以例如借助分束器耦合到加工激光器的射束路径中或耦合到激光加工设备中。优选地,测量射束在测量射束传播方向上在偏转单元之前耦合到激光加工设备的射束路径中。
附图说明
52.下面根据附图详细地描述本发明的实施方式。
53.图1a示出根据本发明的实施方式的用于借助激光束加工工件的激光加工系统的示意图,该激光加工系统用于执行分析激光加工过程或用于分析通过激光加工过程产生的焊缝的方法;
54.图1b示出根据本发明的另外的实施方式的用于借助激光束加工工件的激光加工系统的示意图,该激光加工系统用于执行分析激光加工过程或用于分析通过激光加工过程产生的焊缝的方法;
55.图2示出根据本发明实施方式的方法的流程图;
56.图3a-3c示出根据本发明的实施方式的方法的测量路径;
57.图4a-4d示出借助根据本发明的实施方式的用于分析激光加工过程的方法进行分析的焊缝;
58.图5a-5d示出由根据实施方式的方法针对图4a-4d中所示的焊缝感测到的测量信
号的示例性曲线;
59.图6示出根据本发明的实施方式对于包括良好焊接和不良焊接的多个测量的示例性的积分值;
60.图7示出借助根据本发明的实施方式的用于分析激光加工过程的方法进行分析的焊缝;
61.图8示出由根据实施方式的方法针对图7所示的焊缝感测到的测量信号的示例性曲线;和
62.图9示出根据本发明的实施方式针对图8所示的测量信号的示例性积分值。
63.在下面,只要不另外强调,对于相同或相同作用的元件设有相同的附图标记。
具体实施方式
64.图1示出根据本发明的实施方式的用于借助激光束加工工件的激光加工系统的示意图,该激光加工系统用于执行用于分析激光加工过程,尤其用于分析或评价通过激光加工过程产生的焊缝的方法。在该详细的说明中描述了实施方式,其中测量射束是激光束。在此,测量射束可以来自用于产生加工激光束的激光源或来自用于产生先导激光束的先导激光源。然而,本公开不限于此。毫无问题地,测量射束可以来自led源或耦合到激光加工设备10的加工激光束路径中的led光。
65.激光加工系统1包括激光加工设备10、传感器模块20和控制单元40。
66.激光加工设备10,例如可以构造为激光加工头、尤其激光焊接头,设置为用于将从激光源或激光光纤一端射出的激光束(未示出)借助射束引导和聚焦光学器件(未示出)聚焦或聚束到待加工的工件30a、30b上,以便由此实施加工或加工过程。因此,激光加工设备10设置为用于提供用于激光加工工件的加工射束。该加工尤其可以包括激光焊接。此外,激光加工设备10设置为用于将测量射束对准被加工的部位。在测量射束照射到工件30a、30b上时,测量射束的一部分反射到工件30a、30b的工件表面上。该反射的测量辐射11进入到激光加工设备10中,并且在那里被分束器12从激光束的射束路径中解耦。反射的测量辐射11被引导到传感器模块20中,并且在那里作用到探测器(未示出)上。探测器设置为用于探测或测量反射测量辐射11的强度,并且在此基础上生成或输出测量信号。探测器可以包括光电二极管或包括光电二极管或像素阵列。光电二极管在照射的测量射束或反射的测量辐射11的波长范围内具有光谱灵敏度。
67.控制单元40与传感器模块20连接并且接收探测器的测量信号。控制单元40可以设置为用于记录测量信号。控制单元40设置为用于确定和/或分析激光加工的加工结果,并且尤其设置为用于分析激光焊接过程或激光焊接过程的结果、尤其是焊缝。此外,控制单元40可以设置为用于基于分析结果控制激光加工设备10。
68.根据本发明的实施方式,激光加工系统1可以设置为用于执行和/或调节激光加工过程、尤其激光焊接,并且用于执行分析激光加工过程的方法、尤其分析或评价通过激光加工过程产生的焊缝。
69.在图1a所示的激光加工系统1的实施方式中,工件30a、30b和探测器之间的反射测量辐射11的射束路径至少区段地位于激光加工设备10内和/或与激光束的射束路径同轴。
70.图1b示出根据本发明的另外实施方式的激光加工系统的示意图。图1b中所示的实
施方式与图1a中所示的激光加工系统的实施方式类似,因此在下面仅描述不同之处。如在图1b中所示地,传感器模块20或探测器布置成,使得工件30a、30b和探测器之间的反射测量辐射11的射束路径完全位于激光加工设备10外。在这种情况下,图1a中所示的分束器12以及传感器模块20与激光加工设备10之间的接口不是必要的。
71.图2示出根据本发明的实施方式的用于分析激光加工过程、尤其用于分析或评价通过激光加工过程产生的焊缝的方法的流程图。
72.该方法开始于通过将具有第一激光功率的激光束照射到两个或多个待焊接工件中的至少一个上形成焊缝(步骤s1)。随后将测量射束照射到在步骤s1中形成的焊缝上(步骤s2)。例如,测量射束可以是具有比第一激光功率更低的第二激光功率的激光束。在此,第二激光功率低于第一激光功率,以防止耦合到材料中。感测对于测量射束的从焊缝反射的部分的测量信号(步骤s3)。作为最后的步骤,基于感测到的测量信号确定是否存在焊接缺陷(步骤s4)。换言之,可以确定在工件之间是否存在电或机械接触,或在工件之间是否存在间隙。
73.根据本发明,可以通过测量或探测和分析评估从焊缝反射的测量辐射来确定是否存在焊接缺陷。分析评估可以基于感测到的测量信号的强度或信号水平,和/或基于测量信号关于时间基础变化的程度(也称为“噪声”、“噪声部分”或“噪声信号”或测量信号的“方差”)。
74.焊接缺陷可以包括以下至少一个:在工件之间的缺失的焊接连接部、工件之间的间隙以及“假朋友”。焊接连接部可以在工件之间产生或表示接触、尤其是电接触。在一个示例中,可以识别和区分没有间隙(即零间隙)的焊接部或者说焊缝以及具有间隙的焊接部或者说焊缝。在另一示例中,可以识别和区分具有间隙和间隙桥接的焊接部或者说焊缝以及具有间隙,但无间隙桥接的焊接部或者说焊缝(“假朋友”)。
75.为此,例如在步骤s1中的实际激光焊接过程之后,尤其在焊缝冷却和/或凝固之后,用激光束再次越过焊缝,即激光束再次对准或照射到焊缝上(步骤s2),在该示例中,激光束用作测量射束。然而,重新照射的激光束具有比在实际激光焊接过程中的激光功率更低的激光功率,从而激光束或激光功率尽可能少地或甚至不会耦合到工件或焊缝中。通过具有第二激光功率的激光束对焊缝进行追踪能够以与具有第一激光功率的激光束照射来形成焊缝相同或不同的进给速度进行。探测由焊缝反射的激光辐射的强度并且感测相应的测量信号(步骤s3)。根据实施方式,第二激光功率在5w至300w之间、优选地在5w至200w之间或甚至在1mw至10mw之间。反射的测量或激光辐射的强度在存在焊接缺陷的情况下比在良好焊接的情况下,即在不存在焊接缺陷的情况下更高。例如,表面粗糙度在有焊接缺陷的情况下可以比在没有焊接缺陷的焊缝情况下更低。因此,在步骤s4中,可以基于感测到的测量信号确定是否存在焊接缺陷。
76.确定是否存在焊接缺陷可以基于测量信号的积分和/或测量信号在至少一个区域中的噪声部分的积分。为此,在用于确定是否存在焊接缺陷的步骤s4中,可以对测量信号或噪声部分的至少一个区域求积分。在这种情况下,如果积分超过预给定的积分极值,则可以确定存在焊接缺陷。“积分”在此可以表示在所考虑区域中的测量信号或噪声部分的面积。替代地或附加地,用于确定是否存在焊接缺陷可以基于测量信号的振幅或振幅平均值、测量信号和参考曲线之间的面积或基于测量信号在参考值上方的面积以及测量信号在其至
少一个区域中的缺陷频率中的至少一个。“振幅”在此可以定义为与参考轨迹相比,测量信号过冲的幅度或量值。缺陷频率可以视为对于测量信号过冲数量的量度。
77.根据实施方式,测量信号基于对反射部分或反射测量辐射的辐射强度的测量或探测。对反射部分的辐射强度的测量或探测可以借助光电二极管进行。光电二极管可以在包括测量射束波长的波长范围内具有光谱灵敏度。根据实施方式,光电二极管可以在测量射束的波长处具有最大的光谱灵敏度。例如,测量信号可以通过在图1所示的实施方式中的传感器模块20的探测器感测。然而,本发明不限于此。
78.由光电二极管输出的测量信号可以是一个时间上可变的电压信号、尤其是模拟电压信号。根据实施方式,该测量信号可以被预处理。尤其,测量信号可以被转换为数字电压信号,其包括配属于各时间点的电压值。此外,测量信号可以被平滑和/或过滤。因此,测量信号可以相应于光电二极管的输出电压的时间曲线。
79.根据实施方式,测量射束的照射(步骤s2)可以沿着预给定的测量路径302进行,如在图3a-3c中所示的那样。根据实施方式,测量射束的照射(步骤s2)可以包括通过测量射束对焊缝301进行追踪。换言之,测量射束在焊缝301上沿着该焊缝本身被引导。在该示例中,测量路径302可以包括第一工件30a的表面上的区域、焊缝301上的区域以及第一工件30a或第二工件30b的表面上的区域(参照图3a和3c)。根据另外的实施方式,测量射束的照射也可以至少部分地横向于焊缝301进行。在此,例如焊缝301可以用测量射束垂直于焊缝301延伸地越过。在该示例中,测量路径302可以包含第一工件30a的表面上的区域、焊缝301上的区域和第一工件30a的表面上的另一区域(参照图3b)。如果测量射束的照射和/或测量信号的感测至少部分地沿着焊缝301或者如果用测量射束追踪焊缝301,则可以例如区分沿着焊缝301存在焊接连接部的区域与沿着焊缝301不存在焊接连接部(即存在焊接缺陷)的区域。因此,根据实施方式可以基于测量信号确定至少在沿着工件之间的焊缝301的区域中是否存在焊接连接部。如果已经确定至少在工件之间沿着焊缝301的区域中存在焊接连接部,则可以对于焊接的工件整体上确定存在焊接连接部。因此,可以对不均匀焊缝301进行分析,其中存在具有焊接连接部的区域和没有焊接连接部的区域、尤其是没有电接触的区域。此外,借助根据本发明的方法可以沿着焊缝301定位缺陷。根据具有焊接连接部和没有焊接连接部的部分,可以估计出物理特征参量的绝对值,如导电性或强度。
80.如果测量信号如上所述是具有配属于各时间点的电压值的时间上可变的电压信号,则可以根据已知的进给速度和已知的焊缝位置或已知的测量路径的延伸对测量信号进行转换,使得将电压值配属于相应于各时间点的测量路径的位置。因此,如此转换的测量信号可以是一个局部可变的、时间上独立的电压信号。
81.具有第一激光功率的激光束的照射用于产生焊缝(步骤s1)可以沿着预给定的加工路径关于工件30a、30b、尤其关于一个或多个工件的表面进行。例如,加工路径可以包括锯齿形图案或之字形图案,以便产生具有预给定宽度的直线焊缝。根据实施方式,测量射束的照射和/或测量信号的感测(步骤s2、s3)可以沿着同一预给定的加工路径进行。换言之,测量路径可以与加工路径相同。
82.根据实施方式,以第一激光功率照射的激光束和测量射束可以具有相同的波长。以第一激光功率照射的激光束和测量射束可以来自同一激光源或由同一激光源产生。尤其,在图1所示的实施方式中的同一激光加工设备10可以用于具有第一激光功率的激光束
的照射和测量射束的照射。如果测量射束来自与加工激光束不同的源,则测量射束或者可以例如通过分束器耦合到加工激光束的射束路径中,或者照射的测量射束的射束路径可以完全在激光加工设备10外延伸。在后一种情况下,测量射束源可以安装在激光加工设备10外部。
83.根据本发明的实施方式,该方法尤其可以用于分析在激光焊接搭接或平行对接的工件时的焊缝、尤其是i型焊缝。
84.至少一个工件可以包括电池、电池模块和/或电池单体或它们的至少一部分,尤其导电体、壳体、电池单体盖、电池单体连接器或端子。电池单体可以构造为袋形电池单体、棱柱形电池单体或圆柱形电池单体或可以包括这些电池单体中的至少一种。步骤s1中的激光焊接可以用于电池单体壳体的气密焊接、电池单体盖的隔膜的焊接、电池单体盖中的端子的焊接以及电池单体盖的爆裂片的焊接。根据另外的实施方式,将两个或多个电池的导电体焊接或相互接触。在这些情况下,根据本发明的方法可以用于分析工件之间的焊接的电接触。
85.例如在袋形电池单体中,电池单体的待焊接部分、尤其是导电体可以由铝al构成,另一电池单体的待焊接部分、尤其是导电体可以包括铜cu,其中,后者可以选择性地涂覆镍(层厚度例如8μm)。该涂层可以电镀地施加。替代地,袋形电池单体的两个待焊接部分可以由铝或铜构成。待焊接部分的厚度可以在0.2mm至0.4mm之间。因此,焊接连接部可以在铜与铝(cu-al)之间或铝与铝(al-al)之间或铜与铜(cu-cu)之间或铝与铜(al-cu)之间形成。
86.在棱柱形电池单体中,电池单体的两个待焊接部分可以由铝构成。待焊接部分的厚度可以在1mm至5mm之间。因此,在这种情况下,焊接连接部在铝和铝al-al之间形成。
87.在圆柱形电池单体中,电池单体的待焊接部分、尤其电池单体壳体可以由或铝构成,而另一电池单体的待焊接部分、尤其导电体/电池单体连接器可以由铝铜构成,其中,后者可以选择性地涂覆镍(层厚度例如8μm)。该涂层可以电镀地施加。替代地,电池单体的待焊接部分、尤其是导电体可以由构成,而另一电池单体的待焊接部分、尤其是导电体可以由al铝构成。在这两个示例中,待焊接部分优选地由铜或铝焊接。待焊接部分的厚度可以在0.4mm至0.5mm之间。
88.图4a-4d示出借助根据本发明的实施方式的方法进行分析的焊缝。图4a-4d分别在上排(“摄像机”)示出在激光焊接时在搭接处形成的i型焊缝的俯视图,在中间排示出各焊缝的剖面图,在下排中示出该剖面图的示意图。在各焊缝的俯视图中不能区分存在良好焊接还是存在不良焊接。根据实施方式,良好焊接可以定义为在焊接工件之间没有间隙的焊接部或者说焊缝,或定义为具有间隙和具有间隙桥接的焊接部,而不良焊接可以定义为具有间隙和无间隙桥接的焊接部。
89.图4a在第一间隙(“间隙:0μm”)中示出没有间隙的焊缝。焊接的工件30a、30b,在此作为板材示出,在它们之间没有间隙,并且电流可以流过焊缝。因此,产生的焊缝可以被称为“良好焊接”。如图所示,焊道相对粗糙和凸形地成型。
90.图4b在第二间隙(“间隙:100μm”)中示出在两个工件30a、30b之间具有间隙s的焊缝。该间隙s可以被容忍,因为间隙s被桥接(图4b中的间隙桥接部“b”)。因此,尽管存在间隙s,但在工件之间仍有焊接连接部,即电接触。因此,该焊接也可以称为“良好焊接”。如图所示,焊道相对粗糙和凹形地成型。
91.图4c-4d示出可以借助根据本发明实施方式的方法识别出的典型的缺陷图像或加工缺陷。图4c和4d示出在第三和第四间隙(“间隙:150μm”和“间隙:200μm”)的典型的缺陷图像,也称为“假朋友”。在此,在工件30a、30b之间存在没有被桥接的间隙s,使得工件之间没有电接触,即不存在焊接连接部。因此,这些焊接可以称为“不良焊接”。如图所示,在两种情况下的焊道都相对光滑,并且相对于工件表面几乎没有凸起或凹陷。
92.图5a-5d示出测量信号的示例性曲线,这些曲线在根据实施方式的用于分析激光加工过程的方法中沿着测量路径被感测。图5a-5d所示的测量信号的曲线分别利用根据本发明的实施方式的方法感测图4a-4d所示的焊接部或者说焊缝。测量路径302可以或者沿着焊缝301(参照图3a和3c)或者横向于焊缝301(参照图3b)延伸,在所示的示例中不但包括工件表面上的区域而且包括焊缝301上的区域。
93.测量信号可以通过探测在测量射束照射时反射的功率强度来感测。在此,较高的强度相应于较大的测量信号值。在图5a-5d中分别示出测量信号的三个区域。第一和第三区域“工件”相应于测量射束作用到工件30a、30b的表面上的区域、尤其是未加工的表面,即在焊缝301外的表面。因为工件30a、30b的表面与焊缝301相比是光滑的,所以反射测量辐射的强度高。位于第一区域和第三区域之间的第二区域“焊缝”相应于测量射束作用到焊缝301或焊道上的区域。与工件30a、30b的未加工表面相比,反射测量辐射的强度低,因为焊缝301或焊道的表面是粗糙的。在图5a-5d中可看到,“焊缝”区域中的测量信号的平均值总是低于“工件”区域中的测量信号的平均值。图5a-5d中灰色背景的测量信号区域相应于一分析评估区域,在该分析评估区域中对测量信号进行分析评估,用于确定是否存在焊接缺陷。在图5a-5d中还示出用于测量信号的参考值或参考曲线。根据本发明的实施方式,如果感测到的测量信号的积分大于预给定的极值或者说测量信号在参考值上方的面积大于预给定的极值,则确定存在焊接缺陷。
94.图5a和5b所示的感测到的测量信号的曲线相应于图4a和4b的焊接部。在图5a中,测量信号位于参考值下方。在图5b中,测量信号也大多位于参考值下方,在测量信号超过参考值的区域中,积分或者说参考曲线和测量信号之间所包围的面积小于预给定的极值。因此,在根据本发明的方法中确定不存在焊接缺陷。即在这种情况下,在工件之间存在焊接连接部或在工件之间存在电接触。
95.图5c和5d所示的感测到的测量信号的曲线相应于图4c和4d的焊接部。在图5c和5d中,在测量信号超过参考值的区域中,积分或者说参考曲线和测量信号之间所包围的面积大于预给定的极值。因此,在根据本发明的方法中确定存在焊接缺陷或在工件之间不存在焊接连接部、尤其是电接触。
96.因此,根据积分或面积值可以确定是否存在良好焊缝或不良焊缝。如果积分值小于预给定的积分极值,则相应的焊接可以被识别为良好焊接。相应地,如果积分值大于预给定的积分极值,则相应的焊接可以被识别为不良焊接。这在图6中对于多个不同的焊接部或者说焊缝示例性地直观示出。在此直观示出对不同焊缝的多次测量和相应求出的积分值。如图6所示,积分极值将良好焊接和不良焊接分开。
97.参照图5a-5d阐述的积分形成可以包括在分析评估区域中对测量信号的积分,即在包括焊缝的至少一部分的测量信号的区域中。参照图5a-5d阐述的积分形成可以替代地包括在测量信号的一个或多个区域中求积分,其中测量信号仅超过参考值。测量信号的这
些区域可以包括测量信号的整体或局部的最大值,也可以称为测量信号的“峰值”。例如,图5c所示的测量信号包括在灰色背景的分析评估区域中的五个这种区域或焊缝上的六个这种区域。根据实施方式,如果在测量信号超过参考值的至少一个区域中的积分之和超过预给定的极值,则可以确定存在焊接缺陷。根据实施方式,也可以确定这些积分中的具有最大值的积分。随后,如果该最大积分值超过预给定的极值,则可以确定存在焊接缺陷。
98.图7示出具有对于不同间隙尺寸,即在焊缝区域中的工件之间的不同间距的焊缝或者说焊接部的显微图像。可看到焊缝轮廓曲率的明显差异。“间隙”给定各焊接的工件之间的间隙尺寸。“三维视图”代表各焊缝的三维视图。“显微切片”示出焊缝和工件的剖面。“二维视图”代表各焊缝的二维的微观俯视图。“焊道和测量信号”代表各焊缝表面形状的示意性横截面和相应于箭头数量的相应感测到的测量信号值。在各焊缝的俯视图中,不能区分是良好焊接还是不良焊接。
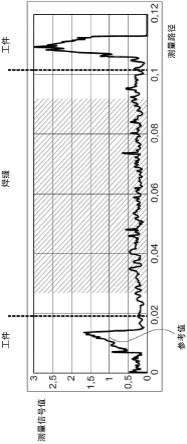
99.图8示出对于图7中所示的焊接部感测的测量信号的详细曲线。在此,对于图7所示的焊接部分别感测多个测量信号,其曲线在图8中叠加示出。测量信号可以通过探测在测量射束照射时反射的激光功率的强度来感测。在此,更高的强度相应于更大的测量信号值。
100.无焊接缺陷的焊接的焊缝或者说焊道的拓扑结构,尤其当在焊接的工件之间不存在间隙时,和具有焊接缺陷的焊接,尤其当在焊接的工件之间存在间隙时,可以显著地区别。例如在图7中,“二维视图”一列(其示出各焊缝的微观图像)中,具有零间隙(0μm)的焊接部与具有10μm间隙的焊接部之间的拓扑结构的差异明显可见。换言之,焊缝或者说焊道的表面拓扑结构取决于焊接的工件之间的间隙尺寸。在零间隙的情况下,焊缝的表面凸形地成型。随着焊接的工件之间的间隙尺寸(5μm至10μm)增加,凸形曲率变小或者说焊缝表面变得更平。在一定的间隙尺寸下,在此例如大于20μm,焊缝的表面凹形地成型,即焊缝表面具有凹形的形状。
101.发明人认识到,尤其在0μm至20μm范围内的这些非常小的间隙尺寸,或在焊接的工件之一、尤其是上方工件或更靠近激光加工设备的工件的厚度的0至1/10范围内可以说明,测量信号的强度取决于间隙尺寸。例如,在焊缝表面有凸形曲率的情况下,少量测量辐射被反射回或者说测量辐射与测量射束的入射方向偏离地被反射回。因此,测量信号的强度减小。随着曲率减小或间隙尺寸增加,直至约20μm,由于较小的焊缝曲率,更多测量辐射被反射回。因此,测量信号的强度增加。因此,对焊接缺陷的识别、尤其是在焊接的工件之间是否存在间隙和/或对间隙尺寸的识别可以根据对测量信号的分析评估实现。测量信号允许将焊接部明确地分类为良好焊接或不良焊接。例如可以定义为,如果间隙尺寸等于或大于5μm或等于或大于20μm,则存在焊接缺陷和从而不良焊接。
102.根据本发明的实施方式,确定是否存在焊接缺陷基于在测量信号中至少一个区域中的测量信号的积分。在这种情况下,如果感测到的测量信号的积分值大于预给定的极值,则可以确定存在焊接缺陷。这结合图9直观示出。图9在横轴上示出对于图8所示的并且对于焊接部0μm、5μm、10μm、20μm、30μm感测到的测量信号的测量次数,并且在纵轴上示出相应的积分值。如图8所示,积分极值将零间隙的良好焊接与具有5μm或更大间隙尺寸的不良焊接分开。
103.根据本发明,给出一种用于分析焊缝、尤其用于识别焊接缺陷或区分良好焊接和不良焊接的方法,以及用于执行该方法的激光加工系统。在此,在执行实际的激光焊接过程
之后,比激光焊接过程具有更低激光功率的激光束照射到焊缝上,并且探测和分析评估从焊缝反射的测量辐射。根据本发明的方法与工件的厚度和/或材料类型无关。本发明基于以下认识:由于良好焊接和不良焊接的焊缝的不同拓扑结构或表面特性可以基于反射的测量辐射推导出关于存在焊接缺陷的结论。由此可以简单且快速地评价激光焊接过程的加工质量和焊缝质量。
104.优选的实施例:
105.1.一种用于分析通过激光焊接过程形成的焊缝(301)的方法,包括:
[0106]-形成(s1)用于焊接至少两个工件(30a,30b)的焊缝(301),其方式是,将具有第一激光功率的激光束照射到工件(30a,30b)中的一个工件上;
[0107]-将具有第二激光功率的激光束照射(s2)到所述焊缝(301)上,其中,所述第二激光功率低于所述第一激光功率;
[0108]-感测(s3)以第二激光功率照射的激光束的从所述焊缝(301)反射的部分并且产生相应的测量信号;和
[0109]-基于所述测量信号确定(s4)在所述工件(30a,30b)之间是否存在焊接连接部。
[0110]
2.根据示例1的方法,其中,感测反射部分的强度。
[0111]
3.根据前述示例之一的方法,其中,具有第一激光功率的激光束的照射(s1)沿着关于所述工件(30a,30b)的预给定的加工路径进行,并且其中,具有第二激光功率的激光束的照射(s2)沿着与所述加工路径相同的测量路径(302)进行。
[0112]
4.根据前述示例之一的方法,其中,具有第二激光功率的激光束的照射(s2)发生在所述焊缝(301)的一个点上或沿着测量路径(302)进行,该测量路径沿着和/或横向于所述焊缝(301)延伸。
[0113]
5.根据前述示例之一的方法,其中,以第一激光功率照射的激光束和/或以第二激光功率照射的激光束具有在红外光谱范围内或在可见的绿色和/或蓝色光谱范围内的波长。
[0114]
6.根据前述示例之一的方法,其中,所述第二激光功率选择成,使得以第二激光功率照射的激光束基本上完全被所述工件(30a,30b)反射。
[0115]
7.根据前述示例之一的方法,其中,所述第二激光功率在1w至1kw之间、优选地在5w至300w之间、特别优选地在5w至200w之间。
[0116]
8.根据前述示例之一的方法,其中,如果测量信号低于用于该测量信号的参考值或参考曲线,则确定在所述工件(30a,30b)之间存在焊接连接部。
[0117]
9.根据前述示例之一的方法,其中,确定(s4)在工件(30a,30b)之间是否存在焊接连接部,包括:
[0118]
对焊缝(301)的测量信号求积分,其中,如果该积分低于预给定的积分极值,则确定在所述工件(30a,30b)之间存在焊接连接部;和/或
[0119]
对焊缝(301)的测量信号求平均,其中,如果平均值低于预给定的平均极值,则确定在所述工件(30a,30b)之间存在焊接连接部;和/或
[0120]
确定焊缝(301)的测量信号的在参考值上方的面积,如果该面积小于预给定的极值,则确定在所述工件(30a,30b)之间存在焊接连接部。
[0121]
10.根据前述示例之一的方法,其中,所述焊接连接部是所述工件(30a,30b)之间
的接触部、尤其是所述工件(30a,30b)之间的电接触部。
[0122]
11.根据前述示例之一的方法,其中,在激光束以第一激光功率照射时,所述工件(30a,30b)以搭接或平行对接的方式布置。
[0123]
12.根据前述示例之一的方法,其中,至少一个工件(30a,30b)的材料具有铝、钢、铜、涂覆镍的铜和/或镍或者由它们构成。
[0124]
13.根据前述示例之一的方法,其中,至少一个工件具有在0.1mm至5mm之间、在11mm至5mm之间、在0.1mm至1mm之间、在0.2mm至0.4mm之间的厚度,或0.3mm的厚度。
[0125]
14.根据前述示例之一的方法,其中,所述工件(30a,30b)包括电池单体的导电体和/或电池单体的端子。
[0126]
15.一种用于分析通过激光焊接过程形成的焊缝(301)的激光加工系统(1),包括
[0127]
激光加工头(10),用于将激光束照射到工件(30a,30b)上;
[0128]
传感器模块(20),用于感测反射的激光辐射;和
[0129]
控制装置(40),其设置为用于执行根据前述示例之一的方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1