一种激光焊接机的自动夹取焊接装置的制作方法
1.本技术涉及激光焊接机的技术领域,尤其是涉及一种激光焊接机的自动夹取焊接装置。
背景技术:
2.激光焊接机,又称为镭射焊机,是激光材料加工常用的设备,其主要是利用高能量的激光脉冲对材料进行微小区域内的局部加热,再通过热传导向材料的内部扩散,将材料融化后形成特定熔池,以达到焊接的目的。激光焊接机可以结合自动化产线一起进行同步作业,具有很大的灵活性。
3.以焊接电子烟点火传感器的引脚为例,常见的激光焊接机是工人将电子烟点火传感器从上料振动盘内取出事先固定在工作台上,传送器将拉直装置输送来的钼丝传送给切割器,切割器随后立即按照设定长度切断钼丝,切割器还具有一副用来夹持被切断钼丝的机械爪,机械爪将钼丝插入电子烟点火传感器内,与此同时,激光发射装置在相应驱动件的驱动下已经移动至对应工作台的焊接位置,激光发射装置再发射激光进行焊接,随后,工人再将焊接完成的电子烟点火传感器取走,再继续放置下一个待焊接引脚的电子烟点火传感器。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:由于是采用人工作业的方式事先将电子烟点火传感器固定在工作台上,这样既浪费时间导致生产加工效率低,且存在人力成本高的问题。
技术实现要素:
5.为了取代人工,实现对待焊接工件的自动夹取并固定在工作台上,减少时间浪费、提高生产加工效率、降低人力成本,本技术提供一种激光焊接机的自动夹取焊接装置。
6.一种激光焊接机的自动夹取焊接装置采用如下技术方案:一种激光焊接机的自动夹取焊接装置,包括焊机操作台及设于焊机操作台顶部且可上下左右移动的移动座,移动座连接有带动移动座本身上下左右移动的驱动机构;所述移动座连接有一号夹放器、一号定位器、二号夹放器、二号定位器,焊机操作台的顶面并排设有第一焊接固定座和第二焊接固定座;一号夹放器和二号夹放器用于夹取转运零件,一号定位器用于与第一焊接固定座配合共同固定零件,二号定位器用于与第二焊接固定座配合共同固定零件。
7.通过采用上述技术方案,在驱动机构的驱动下,移动座能够带动一号夹放器、一号定位器、二号夹放器、二号定位器同步移动;一号夹放器首先从上料振动盘夹取待焊接的零件,随后放置在第一焊接固定座,第一定位器与第一焊接固定座共同压紧零件,与此同时,切割器将引脚插入零件内,激光发射装置对零件的一个引脚进行焊接。二号夹放器将第一焊接固定座内的零件转运至第二焊接固定座(在此过程中,一号夹放器继续从上料振动盘夹取待焊接零件并放入第一焊接固定座内),二号定位器与第二焊接固定座共同压紧零件,
与此同时,另一个切割器将另一根引脚插入零件内,激光发射装置对零件的另一个引脚进行焊接,焊接完成后,二号定位器远离第二焊接固定座。上述自动化焊接过程能够取代人工自动完成零件的定位和焊接,减少时间浪费、提高生产加工效率、降低人力成本。
8.可选的,所述移动座还连接有三号夹放器和三号定位器;焊机操作台的顶面还设有质检器,质检器包括可升降带电压头和质检固定座,质检固定座与焊机操作台固接,可升降带电压头与质检固定座连接;三号夹放器用于将焊接完成的零件转运至质检器,三号定位器用于与质检固定座配合共同固定零件,可升降带电压头用以对零件成品施加电压以检验是否合格。
9.通过采用上述技术方案,待零件的两个引脚焊接完成后,三号夹放器从第二焊接固定座夹取焊接完成的零件并转运给质检器,随后,三号定位器抵压零件,可升降带电压头抵接住零件,并且对零件施加电压,以检测零件引脚的焊接是否合格,能够对焊接合格的零件进行自动筛选。
10.可选的,所述移动座还连接有四号夹放器,焊机操作台设有对应四号夹放器的导向盒,导向盒可靠近或远离四号夹放器用以暂存零件成品。
11.通过采用上述技术方案,四号夹放器夹取焊接完成的零件,如果零件的引脚焊接合格,导向盒能够靠近四号夹放器,四号夹放器使合格的零件自动落入导向盒内;如果零件的引脚焊接不合格,导向盒远离四号夹放器。导向盒与四号夹放器配合,能够自动实现对于合格零件的收集。
12.可选的,在远离所述四号夹放器的方向,导向盒倾斜降低,焊机操作台在导向盒的最低处设有合格品收纳盒。
13.通过采用上述技术方案,焊接合格的零件落入导向盒内部后,能够沿倾斜的导向盒自动滑落至合格品收纳盒内部,避免导向盒内部过多地堆积零件。
14.可选的,所述焊机操作台设有与四号夹放器相配合的次品收纳盒。
15.通过采用上述技术方案,四号夹放器使不合格的零件落入次品收纳盒内,次品收纳盒能够对焊接不合格的零件进行自动收集,保持焊机操作台的整洁有序。
16.可选的,所述一号定位器、二号定位器、三号定位器均连接有用以压紧零件的定位件,定位件套设有弹性套。
17.通过采用上述技术方案,弹性套能够避免定位件直接接触零件,对零件进行有效保护。
18.可选的,所述驱动机构包括左右横移座、左右伸缩缸及上下伸缩缸;左右横移座与焊机操作台滑动配合,左右伸缩缸的两端分别与焊机操作台、左右横移座固接,上下伸缩缸的两端分别与左右横移座、移动座固接。
19.通过采用上述技术方案,左右伸缩缸带动左右横移座沿着焊机操作台水平移动,左右横移座通过上下伸缩缸对移动座进行支撑,上下伸缩缸带动移动座上下移动,进而实现一号夹放器、一号定位器、二号夹放器、二号定位器、三号夹放器、三号定位器以及四号夹放器的上下左右移动,提高其加工效率,实现自动加工。
20.可选的,所述左右横移座的底面固设有滑动部,焊机操作台的顶面开设有滑动槽,滑动部位于滑动槽内且与焊机操作台滑动配合。
21.通过采用上述技术方案,左右横移座通过滑动部与滑动槽的滑动配合实现与焊机
操作台的滑动配合,提高左右横移座的水平移动顺畅性。
22.综上所述,本技术包括以下至少一种有益技术效果:1.本激光焊接机的自动夹取焊接装置的自动化焊接过程能够取代人工自动完成零件的定位和焊接,减少时间浪费、提高生产加工效率、降低人力成本;2.三号夹放器配合质检器,以检测零件引脚的焊接是否合格,能够对焊接合格的零件进行自动筛选;3.导向盒的移动能够将合格品零件装入合格品收纳盒内或者使不合格品零件落入次品收纳盒内,实现对焊接完成的零件的分类收集,保持焊机操作台整洁有序。
附图说明
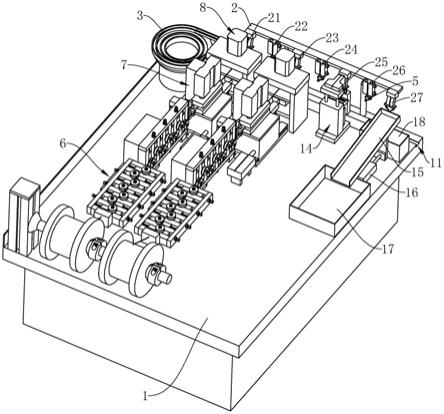
23.图1是本技术实施例激光焊接机的整体结构示意图;图2是本技术实施例激光焊接机的自动夹取焊接装置的结构示意图;图3是本技术实施例激光焊接机的驱动机构的结构示意图;图4是申请实施例弹性套与定位件分离的爆炸图。
24.附图标记说明:1、焊机操作台;11、滑动槽;12、第一焊接固定座;13、第二焊接固定座;14、质检器;141、可升降带电压头;142、升降伸缩缸;143、质检固定座;15、导向盒;16、导向伸缩缸;17、合格品收纳盒;18、次品收纳盒;2、移动座;21、一号夹放器;22、一号定位器;23、二号夹放器;24、二号定位器;25、三号夹放器;26、三号定位器;27、四号夹放器;3、上料振动盘;4、驱动机构;41、左右横移座;411、滑动部;42、左右伸缩缸;43、上下伸缩缸;5、定位件;51、弹性套;6、拉直装置;7、传送器;8、切割器。
具体实施方式
25.以下结合附图1-4对本技术作进一步详细说明。
26.本技术实施例公开一种激光焊接机的自动夹取焊接装置,参照图1和图2,激光焊接机的自动夹取焊接装置包括焊机操作台1,焊机操作台1一侧固定连接有上料振动盘3。焊机操作台1的上方设有可上下左右移动的移动座2,移动座2连接有带动移动座2本身上下左右移动的驱动机构4。移动座2在远离上料振动盘3的方向依次固定连接有一号夹放器21、一号定位器22、二号夹放器23、二号定位器24、三号夹放器25、三号定位器26及四号夹放器27。焊机操作台1的顶面在平行于移动座2的方向并排连接有第一焊接固定座12、第二焊接固定座13、质检器14及导向盒15。
27.参照图1和图2,一号夹放器21、二号夹放器23、三号夹放器25及四号夹放器27用于夹取转运零件,一号定位器22用于与第一焊接固定座12配合共同固定零件,二号定位器24用于与第二焊接固定座13配合共同固定零件,三号定位器26用于与质检器14配合共同固定零件,质检器14用以对零件成品施加电压以检验是否合格,四号夹放器27与导向盒15配合,导向盒15用以暂存合格零件成品。
28.参照图1和图2,本实施例中,一号夹放器21、二号夹放器23、三号夹放器25、四号夹放器27、第一焊接固定座12及第二焊接固定座13均为气动手指。
29.参照图2和图3,驱动机构4包括左右横移座41、左右伸缩缸42及上下伸缩缸43。左右横移座41位于移动座2和焊机操作台1之间,左右横移座41的底面一体成型有滑动部411,
滑动部411为燕尾滑块,焊机操作台1的顶面在朝向滑动部411处开设有燕尾状的滑动槽11,滑动部411位于滑动槽11内且与焊机操作台1滑动配合,左右横移座41的底面与焊机操作台1的顶面滑动贴合。左右伸缩缸42位于左右横移座41的一侧,左右伸缩缸42的缸座与焊机操作台1固定连接,左右伸缩缸42的活塞杆与左右横移座41固定连接。上下伸缩缸43位于左右横移座41与移动座2之间,上下伸缩缸43的缸座与左右横移座41固定连接,上下伸缩缸43的活塞杆与移动座2固定连接。本实施例中,左右伸缩缸42和上下伸缩缸43均为气缸。
30.参照图1和图2,质检器14包括可升降带电压头141、升降伸缩缸142和质检固定座143。质检固定座143与焊机操作台1的台面固定连接,本实施例中,质检固定座143为气动手指。升降伸缩缸142位于可升降带电压头141和质检固定座143之间,本实施例中,升降伸缩缸142为气缸,升降伸缩缸142的缸座与质检固定座143固定连接,升降伸缩缸142的活塞杆与可升降带电压头141固定连接。三号定位器26用于与质检固定座143配合共同固定零件,可升降带电压头141用于抵压零件成品并施加电压以检验零件是否合格。
31.参照图1和图2,导向盒15的底面固定连接有导向伸缩缸16,本实施例中,导向伸缩缸16为气缸,导向伸缩缸16的缸座与焊机操作台1固定连接,导向伸缩缸16的活塞杆与导向盒15固定连接;在远离四号夹放器27的方向,导向盒15逐渐倾斜降低,焊机操作台1在导向盒15的最低处放置有合格品收纳盒17,焊机操作台1放置有与四号夹放器27相配合的次品收纳盒18,次品收纳盒18位于四号夹放器27底部。
32.参照图2和图4,一号定位器22、二号定位器24、三号定位器26的底部均连接有定位件5,定位件5的头部固定套设有弹性套51。
33.本技术实施例一种激光焊接机的自动夹取焊接装置的实施原理为:在驱动机构4的驱动下,移动座2带动一号夹放器21、一号定位器22、二号夹放器23、二号定位器24、三号夹放器25、三号定位器26及四号夹放器27同步移动。
34.一号夹放器21首先从上料振动盘3夹取待焊接的零件,随后放置在第一焊接固定座12,随后,第一定位器与第一焊接固定座12共同压紧零件,与此同时,切割器8将引脚插入零件内,激光发射装置对零件的一个引脚进行焊接。
35.随后,二号夹放器23将第一焊接固定座12内的零件转运至第二焊接固定座13(在此过程中,一号夹放器21继续从上料振动盘3夹取待焊接零件并放入第一焊接固定座12内),随后,二号定位器24与第二焊接固定座13共同压紧零件,与此同时,另一个切割器8将另一根引脚插入零件内,激光发射装置对零件的另一个引脚进行焊接,焊接完成后,二号定位器24远离第二焊接固定座13。
36.三号夹放器25从第二焊接固定座13夹取焊接完成的零件并转运给质检器14,质检固定座143的两个手指夹紧零件,随后,三号定位器26抵压零件,可升降带电压头141下降抵接住零件并且对零件施加电压,以检测零件引脚的焊接是否合格。
37.四号夹放器27从质检固定座143内夹取质检完成的零件,随后移动至对应导向盒15的位置。如果零件的引脚焊接合格,导向伸缩缸16带动导向盒15靠近四号夹放器27,四号夹放器27松开零件成品,使合格的零件自动落入导向盒15内,焊接合格的零件落入导向盒15内部后,沿倾斜的导向盒15自动滑落至合格品收纳盒17内部。如果零件的引脚焊接不合格,导向伸缩缸16带动导向盒15远离四号夹放器27,四号夹放器27松开零件成品,使合格的零件自动落入次品收纳盒18内。
38.以上为一个完整的焊接、质检、分类存放的生产周期,实际生产不断重复以上加工过程。
39.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1