一种新型锂电池极片定位智能焊接装置的制作方法
1.本发明属于锂电池技术领域,具体涉及一种新型锂电池极片定位智能焊接装置。
背景技术:
2.锂电池是一类由锂金属或锂合金为正/负极材料、使用非水电解质溶液的电池,锂电池组是指将多个锂电池串联或并联在一起,并联的电池组要求每个电池电压相同,输出的电压等于一个电池的电压,并联电池组能提供更强的电流;串联电池组没有过多的要求。并联的锂电池组在制造过程中需要通过激光点焊将一个极片与各个锂电池的一极连接在一起,再将另一个极片与各个锂电池的另一极相贴合,最后通过螺栓或其他现有的紧固件将两个极片连接,两个负极片均由能够导电的金属板制成。
3.目前在对锂电池和极片进行焊接时主要采用以下方式:人工将极片水平放置在焊接台上,然后将焊料放置到极片上,操作人员一手持电池,一手持焊枪对电池和极片进行焊接,焊接完一个后再重复焊接下一个,直至将所有电池焊接到极片上,这种方式在实际操作时存在以下的问题:(1)对于圆柱形的锂电池组,人工放置电池难以保证电池组中的电池均匀布置,从而难以保证电池组的重心平稳,影响了电池组在后期使用和运输过程中的稳定性;且人工放置电池过程中难以保证相邻电池间相互贴合,相邻电池之间容易出现空隙,后期电池组在使用过程中各个电池之间容易出现相互磕碰,导致电池组损伤;(2)人工焊接过程中难以保证焊接后各个电池的负极端平齐,对电池负极片的安装造成不便。
技术实现要素:
4.为解决上述技术问题,本发明采用如下技术方案:一种新型锂电池极片定位智能焊接装置,包括底板,底板上表面固定安装有圆柱台,圆柱台上表面开设有与其轴线重合的圆槽;圆柱台上表面围绕圆槽均匀安装有若干个竖直板,竖直板表面水平固定安装有沿圆槽径向布置的电池定位杆,电池定位杆为电动伸缩结构。
5.圆柱台上安装有极片定位机构,极片定位机构包括若干个沿圆槽周向均匀布置的极片定位杆,极片定位杆通过滑动配合方式水平贯穿圆柱台外侧壁与圆槽内侧壁之间的区域,极片定位杆上表面竖直固定安装有连接板,连接板与圆柱台外侧壁之间固定连接有水平的连接弹簧;极片定位杆下表面固定安装有楔形块,圆柱台外壁上竖直滑动安装有水平的导向环,导向环的外侧壁为圆锥面且与楔形块表面相贴合,圆柱台外侧壁上固定安装有若干个定位气缸,定位气缸的伸缩段端部与导向环固定连接。
6.圆柱台上表面开设有与圆槽轴线重合的环形槽,圆柱台上表面通过环形槽滑动安装有焊接机构,焊接机构包括滑动安装在环形槽上的焊接滑块,焊接滑块为电动滑块,焊接滑块上沿圆柱台径向水平固定安装有焊接杆,焊接杆为电动伸缩结构,焊接杆的伸缩段端部固定安装有安装片,安装片朝向圆柱台轴线的表面水平固定安装有焊枪。
7.作为本发明的一种优选技术方案,所述电池定位杆的伸缩段外端面为弧形面,电池定位杆的伸缩段外端面上安装有若干滚珠。
8.作为本发明的一种优选技术方案,所述圆柱台上表面通过环形槽滑动安装有送料机构,送料机构包括滑动安装在环形槽上的送料滑块,送料滑块为电动滑块,送料滑块朝向圆柱台轴线的表面固定安装有水平的导向套,导向套内水平滑动安装有储料盒。
9.作为本发明的一种优选技术方案,所述储料盒顶面安装有与其一体成型的移动板,移动板贯穿导向套;导向套上表面固定安装有两个第一丝杠支架,两个第一丝杠支架之间转动安装有水平的第一丝杠,第一丝杠以螺纹配合方式贯穿移动板,其中一个第一丝杠支架上安装有第一送料电机,第一送料电机与第一丝杠固定连接。
10.作为本发明的一种优选技术方案,所述储料盒内部滑动安装有推料板,储料盒内侧顶面固定安装有两个第二丝杠支架,两个第二丝杠支架之间转动安装有水平的第二丝杠,第二丝杠以螺纹配合方式贯穿推料板,其中一个第二丝杠支架上安装有第二送料电机,第二送料电机与第二丝杠固定连接。
11.作为本发明的一种优选技术方案,所述底板上表面开设有环形的滑槽,滑槽与环形槽轴线重合,底板上表面通过滑槽安装有夹持调节机构,夹持调节机构包括滑动安装在滑槽上的调节滑块,调节滑块为电动滑块;调节滑块上竖直固定安装有调节柱,调节柱上位于圆柱台上方的位置固定安装有水平的调节臂,调节臂为电动伸缩结构;调节臂的伸缩段上安装有竖直的调节气缸,调节气缸的伸缩段底端固定安装有水平的圆盘,圆盘底面沿其周向均匀安装有若干个夹持杆,夹持杆沿圆盘径向与圆盘滑动配合;夹持杆底端固定安装有夹持片。
12.作为本发明的一种优选技术方案,所述调节气缸贯穿调节臂的伸缩段且与调节臂的伸缩段转动配合;调节气缸上固定套设有第一齿圈,调节臂的伸缩段上通过电机座固定安装有第一调节电机,第一调节电机的输出轴上固定安装有与第一齿圈相啮合的第一齿轮。
13.作为本发明的一种优选技术方案,所述圆盘上表面转动安装有调节环,调节环底面固定安装有若干个连接杆,若干个连接杆底端共同安装有水平的调节板,调节板上开设有与夹持杆相互配合的调节槽;调节环上表面固定安装有与其轴线重合的第二齿圈,圆盘外侧壁通过电机座固定安装有第二调节电机,第二调节电机的输出轴上固定安装有与第二齿圈相啮合的第二齿轮。
14.本发明至少具有如下有益效果:(1)、本发明通过极片定位机构对极片进行定位,使得极片与圆槽保持轴线重合状态,在人工将电池放置到极片上后,通过电池定位杆对电池进行定位,使得各个电池与圆槽轴线之间的距离相等,保证了电池在极片上均匀布置,从而保证了电池组的重心平稳,提高了电池组在使用和运输过程中的稳定性;通过电池定位杆对电池进行定位的过程中,相邻的电池被电池定位杆推动从而相互靠近,直至相邻电池相贴合,从而避免了相邻电池之间出现空隙,避免了电池组在运动过程中各个电池之间相互磕碰。
15.(2)、本发明通过夹持调节机构对电池定位杆定位后的电池进行夹持和抬升,从而为送料机构腾出作业空间,送料机构将焊接块放置到极片表面既定的位置后,通过夹持调节机构带动电池下降直至电池与焊接块相贴合,在焊接机构焊接的过程中,通过夹持调节机构继续带动电池下降至焊接完成;每次焊接过程中,夹持调节机构带动电池上升和下降的距离恒定,且电池的起始高度一致,故能够保证焊接后各个电池的负极端平齐,便于电池
负极片的安装。
附图说明
16.下面结合附图和实施例对本发明进一步说明。
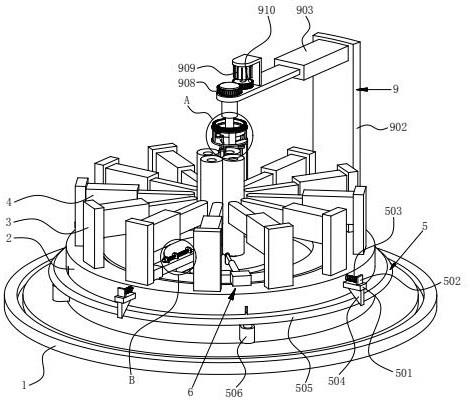
17.图1为本发明实施例中新型锂电池极片定位智能焊接装置的立体结构示意图。
18.图2为图1中a处的放大示意图。
19.图3为图1中b处的放大示意图。
20.图4为本发明实施例中新型锂电池极片定位智能焊接装置的俯视图。
21.图5为本发明实施例中焊接机构的结构示意图。
22.图6为本发明实施例中电池定位杆的部分结构剖视图。
23.图7位本发明实施例中送料机构的部分内部结构示意图。
24.图中:1、底板;101、滑槽;2、圆柱台;201、圆槽;202、环形槽;3、竖直板;4、电池定位杆;5、极片定位机构;501、极片定位杆;502、连接板;503、连接弹簧;504、楔形块;505、导向环;506、定位气缸;6、焊接机构;601、焊接滑块;602、焊接杆;603、安装片;604、焊枪;7、滚珠;8、送料机构;801、送料滑块;802、导向套;803、储料盒;804、移动板;805、第一丝杠;806、第一送料电机;807、推料板;808、第二丝杠;809、第二送料电机;9、夹持调节机构;901、调节滑块;902、调节柱;903、调节臂;904、调节气缸;905、圆盘;906、夹持杆;907、夹持片;908、第一齿圈;909、第一调节电机;910、第一齿轮;911、调节环;912、调节板;913、调节槽;914、第二齿圈;915、第二调节电机;916、第二齿轮。
具体实施方式
25.以下结合附图对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
26.如图1、图4和图6所示,本实施了提供了一种新型锂电池极片定位智能焊接装置,包括底板1,底板1上表面固定安装有圆柱台2,圆柱台2上表面开设有与其轴线重合的圆槽201;圆柱台2上表面围绕圆槽201均匀安装有若干个竖直板3,竖直板3表面水平固定安装有沿圆槽201径向布置的电池定位杆4,电池定位杆4为电动伸缩结构;电池定位杆4的伸缩段外端面为弧形面,电池定位杆4的伸缩段外端面上安装有若干滚珠7。
27.将电池放置到极片上后,通过电池定位杆4推动电池相互靠近,直至相邻电池相贴合,各个电池与圆槽201轴线之间的距离相同;滚珠7与电池表面相贴合,电池可以进行上下移动,但是在电池定位杆4的定位作用下无法进行水平移动。
28.如图1所示,圆柱台2上安装有极片定位机构5,极片定位机构5包括若干个沿圆槽201周向均匀布置的极片定位杆501,极片定位杆501通过滑动配合方式水平贯穿圆柱台2外侧壁与圆槽201内侧壁之间的区域,极片定位杆501上表面竖直固定安装有连接板502,连接板502与圆柱台2外侧壁之间固定连接有水平的连接弹簧503;极片定位杆501下表面固定安装有楔形块504,圆柱台2外壁上竖直滑动安装有水平的导向环505,导向环505的外侧壁为圆锥面且与楔形块504表面相贴合,圆柱台2外侧壁上固定安装有若干个定位气缸506,定位气缸506的伸缩段端部与导向环505固定连接。
29.通过定位气缸506带动导向环505上升,导向环505推动楔形块504、极片定位杆501
和连接板502水平向外移动,连接弹簧503被拉伸;各个极片定位杆501同时向外移动过程中,圆槽201腾出极片放置的空间,通过人工将极片放置到圆槽201中,然后通过定位气缸506带动导向环505下降复位,连接弹簧503的回弹力同步带动楔形块504、极片定位杆501和连接板502水平向内移动复位,直至各个极片定位杆501内端均与极片边缘处相贴合,从而对极片进行定位,保证了极片与圆槽201的轴线重合。
30.如图1、图4和图5所示,圆柱台2上表面开设有与圆槽201轴线重合的环形槽202,圆柱台2上表面通过环形槽202滑动安装有焊接机构6,焊接机构6包括滑动安装在环形槽202上的焊接滑块601,焊接滑块601为电动滑块,焊接滑块601上沿圆柱台2径向水平固定安装有焊接杆602,焊接杆602为电动伸缩结构,焊接杆602的伸缩段端部固定安装有安装片603,安装片603朝向圆柱台2轴线的表面水平固定安装有焊枪604。
31.对极片进行定位后,通过人工将电池依次放置到极片上,由于电池组整体为圆柱形,故组成整体电池组的电池是由多个环形的小电池组构成的,每次焊接前放置一个环形的小电池组,该小电池组中各个电池均位于已焊接电池的外侧;将焊料放置到极片上后,向上提升电池,然后通过焊接机构6对各个电池进行依次焊接,焊接前通过焊接滑块601带动焊接机构6整体转动,通过焊接杆602调整焊枪604与焊接块之间的距离,直至焊枪604头部与焊接块对应,最后通过焊枪604对焊接块进行焊接,使得电池与极片连接在一起即可;一次焊接结束后,重复上述步骤,直至焊接机构6将极片上放置的电池均焊接至极片上;一个小电池组焊接完成后,通过人工将下一个小电池组放置到极片上,通过电池定位杆4对电池定位后,继续通过焊接机构6对电池进行焊接即可。
32.如图3、图4和图7所示,圆柱台2上表面通过环形槽202滑动安装有送料机构8,送料机构8包括滑动安装在环形槽202上的送料滑块801,送料滑块801为电动滑块,送料滑块801朝向圆柱台2轴线的表面固定安装有水平的导向套802,导向套802内水平滑动安装有储料盒803;储料盒803顶面安装有与其一体成型的移动板804,移动板804贯穿导向套802;导向套802上表面固定安装有两个第一丝杠支架,两个第一丝杠支架之间转动安装有水平的第一丝杠805,第一丝杠805以螺纹配合方式贯穿移动板804,其中一个第一丝杠支架上安装有第一送料电机806,第一送料电机806与第一丝杠805固定连接;储料盒803内部滑动安装有推料板807,储料盒803内侧顶面固定安装有两个第二丝杠支架,两个第二丝杠支架之间转动安装有水平的第二丝杠808,第二丝杠808以螺纹配合方式贯穿推料板807,其中一个第二丝杠支架上安装有第二送料电机809,第二送料电机809与第二丝杠808固定连接。
33.送料前通过人工将若干个焊接块放置到储料盒803内部,焊接块的侧壁与储料盒803内侧壁相贴合,相邻焊接块相互贴合在一起;通过送料滑块801带动送料机构8整体移动至既定的送料位置,然后通过第一送料电机806驱动第一丝杠805转动,第一丝杠805驱动移动板804、储料盒803、推料板807、第二丝杠808和第二送料电机809整体水平移动,直至储料盒803开口到达既定的送料位置;通过第二送料电机809驱动第二丝杠808转动,第二丝杠808驱动推料板807移动,直至储料盒803内最外侧的焊接块被推出储料盒803落至极片上表面。
34.如图1、图2和图4所示,底板1上表面开设有环形的滑槽101,滑槽101与环形槽202轴线重合,底板1上表面通过滑槽101安装有夹持调节机构9,夹持调节机构9包括滑动安装在滑槽101上的调节滑块901,调节滑块901为电动滑块;调节滑块901上竖直固定安装有调
节柱902,调节柱902上位于圆柱台2上方的位置固定安装有水平的调节臂903,调节臂903为电动伸缩结构;调节臂903的伸缩段上安装有竖直的调节气缸904,调节气缸904的伸缩段底端固定安装有水平的圆盘905,圆盘905底面沿其周向均匀安装有若干个夹持杆906,夹持杆906沿圆盘905径向与圆盘905滑动配合;夹持杆906底端固定安装有夹持片907;调节气缸904贯穿调节臂903的伸缩段且与调节臂903的伸缩段转动配合;调节气缸904上固定套设有第一齿圈908,调节臂903的伸缩段上通过电机座固定安装有第一调节电机909,第一调节电机909的输出轴上固定安装有与第一齿圈908相啮合的第一齿轮910;圆盘905上表面转动安装有调节环911,调节环911底面固定安装有若干个连接杆,若干个连接杆底端共同安装有水平的调节板912,调节板912上开设有与夹持杆906相互配合的调节槽913;调节环911上表面固定安装有与其轴线重合的第二齿圈914,圆盘905外侧壁通过电机座固定安装有第二调节电机915,第二调节电机915的输出轴上固定安装有与第二齿圈914相啮合的第二齿轮916。
35.通过送料机构8送料前,先通过调节滑块901带动夹持调节机构9整体移动至既定的工作位置,该工作位置与待焊接的电池位置对应,通过调节臂903调节调节气缸904的水平位置,然后通过第一调节电机909带动第一齿轮910转动,第一齿轮910带动第一齿圈908、调节气缸904、圆盘905、夹持杆906和夹持片907整体转动,直至夹持片907与对应电池周围空隙位置对应,接着通过调节气缸904带动圆盘905、夹持杆906和夹持片907下降,最后通过第二调节电机915带动第二齿轮916转动,第二齿轮916带动第二齿圈914、调节环911和调节板912整体转动,调节槽913对夹持杆906的位置进行调节,直至各个夹持片907均与电池外侧壁紧密贴合,从而通过夹持片907对电池起到夹持作用;通过调节气缸904带动圆盘905、夹持杆906、夹持片907和电池整体上升,为送料机构8腾出送料空间,送料完成后,通过调节气缸904带动圆盘905、夹持杆906、夹持片907和电池整体下降,直至电池底端与焊接块相贴合,通过焊接机构6对焊接块进行焊接时,通过调节气缸904带动圆盘905、夹持杆906、夹持片907和电池整体继续下降,直至电池与极片焊接在一起;对单个电池焊接完成后,夹持调节机构9整体复位并移动至下一个工作位置,重复上述步骤对下一个电池进行焊接,直至将环形小电池组中各个电池均焊接到极片上。
36.本实施例中新型锂电池极片定位智能焊接装置的工作步骤如下:第一步:通过人工将极片放置到圆槽201中,然后通过极片定位机构5对极片进行定位,使得极片与圆槽201的轴线重合;将一个环形的小电池组放置到极片上后,通过电池定位杆4推动电池相互靠近,直至相邻电池相贴合,各个电池与圆槽201轴线之间的距离相同;滚珠7与电池表面相贴合。
37.第二步:通过调节滑块901带动夹持调节机构9整体移动至既定的工作位置,该工作位置与待焊接的电池位置对应,通过夹持调节机构9对单个电池进行夹持和抬升,然后通过送料机构8将单个焊接块送至该电池下方的极片上表面,通过夹持调节机构9带动电池下降,直至电池底端与焊接块相贴合,通过焊接机构6对焊接块进行焊接,与其同时通过夹持调节机构9带动电池继续下降,直至电池与极片焊接在一起;对单个电池焊接完成后,夹持调节机构9整体复位并移动至下一个工作位置,重复上述步骤对下一个电池进行焊接,直至将环形小电池组中各个电池均焊接到极片上。
38.第三步:对环形的小电池组中各个电池均焊接到极片上后,将电池定位杆4复位,
然后重复上述步骤,对下一个环形的小电池组进行焊接,直至将所有电池均焊接到极片上;一个极片焊接完成后,将焊接后的极片和电池整体取出,最后通过螺栓等紧固件将焊接后的极片与另一个极片连接即可。
39.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1