一种用于烙铁焊接的机器人末端执行装置的制作方法
1.本发明涉及焊接机器人技术领域,具体涉及一种用于烙铁焊接的机器人末端执行装置。
背景技术:
2.锡焊技术作为一种既古老又在不断创新的焊接技术,无论在基础研究、实际应用等方面都有非常广泛的应用。所以随着锡焊技术的应用越来越广泛,实现产品焊接制造的自动化、柔性化与智能化已经成为必然趋势,采用基于机器人的自动锡焊已经成为焊接技术自动化的标志。
3.目前市场上的很多烙铁焊接机器人由于送丝距离过长易导致送丝阻力增大而引起的卡丝、弯丝、断丝现象。
4.鉴于上述缺陷,本发明创作者经过长时间的研究和实践终于获得了本发明。
技术实现要素:
5.为解决上述技术缺陷,本发明采用的技术方案在于,提供一种用于烙铁焊接的机器人末端执行装置,包括主结构件、焊接单元、送丝单元、图像识别单元;所述焊接单元、所述送丝单元、所述图像识别单元均通过所述主结构件固定设置在机器人手臂末端;
6.所述主结构件顶部的法兰端与机器人手臂末端连接,所述主结构件的底部环形设置有第一安装面、第二安装面、第三安装面、第四安装面,所述焊接单元固定设置在所述第一安装面上,所述送丝单元固定设置在所述第二安装面上,所述图像识别单元中的相机固定设置在所述第三安装面上,所述图像识别单元中的环形光源固定设置在所述第四安装面上。
7.较佳的,所述主结构件包括圆柱杆件和两安装块;所述圆柱杆件的一端为所述法兰端,另一端为细杆端,两所述安装块夹持固定在所述细杆端上;所述安装块设置有半圆弧板,所述半圆弧板的内圆弧面与所述细杆端的圆弧面贴合,两所述安装块的所述半圆弧板上对应设置有连接螺纹孔,连接螺栓同时与对应设置的两所述连接螺纹孔螺纹连接从而使两所述安装块的固定连接以夹紧套设在所述细杆端上。
8.较佳的,所述焊接单元包括转接安装板、弧形滑槽、烙铁头组件和送丝嘴组件;所述转接安装板的上方设置有沉头孔以与所述主结构件的所述第一安装面连接,所述转接安装板的下方设置有腰型孔以与所述弧形滑槽连接;所述弧形滑槽可在所述转接安装板的所述腰型孔内移动,所述弧形滑槽两端分别设置有所述烙铁头组件和所述送丝嘴组件,所述烙铁头组件和所述送丝嘴组件可在所述弧形滑槽上移动。
9.较佳的,所述烙铁头组件包括烙铁头、烙铁头安装块、导轨滑块组、滑块安装板、导轨安装板,所述烙铁头通过所述烙铁头安装块与所述导轨滑块组连接,所述导轨滑块组中的导轨和滑块滑动连接,所述滑块通过所述滑块安装板与所述烙铁头安装块连接,所述导轨通过所述导轨安装板与所述弧形滑槽连接,弹簧的两端通过固定螺钉分别固定在所述滑
块安装板和所述导轨安装板上。
10.较佳的,所述烙铁头安装块设置为夹持固定在所述烙铁头上的两夹持块,两所述夹持块通过螺纹连接夹紧所述烙铁头。
11.较佳的,所述烙铁头安装块上设置的光轴插入所述滑块安装板上设置的光孔中,所述滑块安装板的所述光孔孔壁上径向有一个贯穿螺纹孔,所述贯穿螺纹孔内螺纹连接有紧定螺钉,通过所述紧定螺钉可以固定所述烙铁头安装块和所述滑块安装板的相对角度。
12.较佳的,所述导轨安装板一面设置有所述导轨,另一面设置有连接轴,所述连接轴的端面设置有第一螺纹连接孔,第一连接螺钉通过所述第一螺纹连接孔与所述弧形滑槽固定连接。
13.较佳的,所述送丝嘴组件包括送丝嘴、长矩形块、方矩形块、长杆、圆柱块,所述送丝嘴固定设置在所述长矩形块上,所述长矩形块的一端有第一连接通孔,调节螺钉通过所述第一连接通孔将所述长矩形块固定在所述方矩形块侧面;所述方矩形块正面有一个偏心通孔,所述长杆贯穿所述偏心通孔设置,所述方矩形块另一侧面有第一锁定螺纹孔,所述第一锁定螺纹孔内螺纹设置有第一锁定螺钉,通过所述第一锁定螺钉固定所述方矩形块与所述长杆的相对位置;所述圆柱块的圆柱面上包括一个第二连接通孔和一个第二锁定螺纹孔,所述第二连接通孔和所述第二锁定螺纹孔的轴线垂直相交,所述长杆设置在所述第二连接通孔内,所述第二锁定螺纹孔内螺纹设置有第二锁定螺钉,通过所述第二锁定螺钉固定所述圆柱块与所述长杆的相对位置;所述圆柱块的一个端面设置有第二螺纹连接孔,第二连接螺钉通过所述第二螺纹连接孔与所述弧形滑槽固定连接。
14.较佳的,所述送丝单元包括锡丝线圈、送丝机和安装架;所述安装架包括相互拼接固定的第一安装板、第二安装板和第三安装板,所述第一安装板与所述主结构件的所述第二安装面连接,所述锡丝线圈固定设置在所述第二安装板上,所述送丝固定设置在所述第三安装板上,所述送丝机的进丝口靠近所述锡丝线圈设置,所述送丝机的出丝口对应所述送丝嘴设置。
15.较佳的,所述图像识别单元包括所述环形光源、所述相机、光源安装板、相机安装板;所述光源安装板包括环形板和竖直板,所述环形板和所述竖直板固定连接,所述环形光源固定设置在所述环形板上,所述竖直板与所述主结构件的所述第四安装面连接,所述相机安装板的一面固定设置有所述相机,另一面与所述主结构件的所述第三安装面连接,所述相机位于所述环形光源的正上方,且所述相机的镜头与所述环形光源同心设置。
16.与现有技术比较本发明的有益效果在于:1,本发明将焊接单元、送丝单元、图像识别单元中的光源和相机分别安装于主结构件底部安装块的四个安装面,结构简单紧凑,送丝距离短,避免因送丝距离过长导致送丝阻力增大而引起的卡丝、弯丝、断丝现象的发生,提高生产经济性;2,本发明的焊接单元采用腰型孔和弧形滑槽设计,在距离和角度上均可以对焊接单元进行调节;3,本发明的烙铁头组件和送丝嘴组件分开连接,实现了两者各自调节,互不干扰,此外,烙铁头组件和送丝嘴组件均可以在距离和角度上大范围调节,不仅可以大幅缩短示教和调试的时间,还可以满足更多复杂的工况;4,本发明的烙铁头组件,采用弹簧和直线导轨滑块组设计,增大了烙铁头的弹性和行程,使烙铁头可以始终与焊接部位紧密接触,还可以减少因烙铁头磕碰带来的损失;5,本发明的图像识别单元摒弃了传统的条形光源,选择了补光效果更好的环形光源,并采用相机镜头和环形光源同心的结构设
计,可以有效地减少因光源而引起的图像无法识别现象。
附图说明
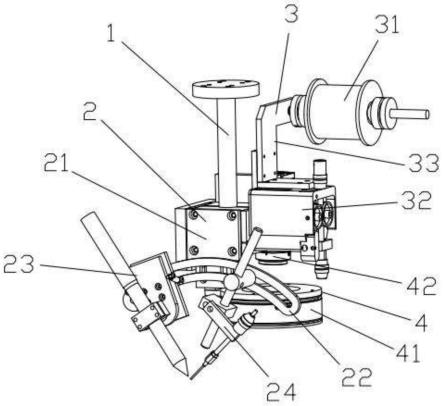
17.图1为所述用于烙铁焊接的机器人末端执行装置的结构视图;
18.图2为所述主结构件的结构视图;
19.图3为所述烙铁头组件的结构视图;
20.图4为所述送丝嘴组件的结构视图;
21.图5为所述送丝单元的结构视图;
22.图6为所述图像识别单元的结构视图。
23.图中数字表示:
24.1-主结构件;2-焊接单元;3-送丝单元;4-图像识别单元;11-圆柱杆件;12-安装块;21-转接安装板;22-弧形滑槽;23-烙铁头组件;24-送丝嘴组件;31-锡丝线圈;32-送丝机;33-安装架;41-环形光源;42-相机;43-光源安装板;44-相机安装板;231-烙铁头;232-烙铁头安装块;233-导轨滑块组;234-滑块安装板;235-导轨安装板;236-固定螺钉;237-弹簧;241-送丝嘴;242-长矩形块;243-方矩形块;244-长杆;245-圆柱块。
具体实施方式
25.以下结合附图,对本发明上述的和另外的技术特征和优点作更详细的说明。
26.如图1所示,图1为所述用于烙铁焊接的机器人末端执行装置的结构视图;本发明所述用于烙铁焊接的机器人末端执行装置包括主结构件1、焊接单元2、送丝单元3、图像识别单元4;所述焊接单元2、所述送丝单元3、所述图像识别单元4均通过所述主结构件1固定设置在机器人手臂末端。
27.如图2所示,图2为所述主结构件的结构视图;所述主结构件1包括圆柱杆件11和两安装块12;所述圆柱杆件11的两端分别设置为法兰端和细杆端,所述圆柱杆件11通过所述法兰端与机器人手臂末端连接,两所述安装块12夹持固定在所述细杆端上。
28.具体的,所述安装块12设置有半圆弧板,所述半圆弧板的内圆弧面与所述细杆端的圆弧面贴合,两所述安装块12的所述半圆弧板上对应设置有连接螺纹孔,连接螺栓同时与对应设置的两所述连接螺纹孔螺纹连接从而实现两所述安装块12的固定连接,以夹紧套设在所述细杆端上。
29.所述主结构件1顶部圆形的所述法兰端设有安装孔以与机器人手臂末端连接,所述主结构件1底部环形设置有第一安装面、第二安装面、第三安装面、第四安装面,如图2中所示的所述第一安装面a、所述第二安装面b、所述第三安装面c、所述第四安装面d四个安装面,所述第一安装面、所述第二安装面、所述第三安装面、所述第四安装面上均设置有用于安装的4个安装螺纹孔,所述焊接单元2固定设置在所述第一安装面a上,所述送丝单元3固定设置在所述第二安装面b上,所述图像识别单元4中的相机42固定设置在所述第三安装面c上,所述图像识别单元4中的环形光源41固定设置在所述第四安装面d上。
30.所述焊接单元2包括转接安装板21、弧形滑槽22、烙铁头组件23和送丝嘴组件24;所述转接安装板21的上方设置有4个沉头孔,用来与所述主结构件1的所述第一安装面a连接,所述转接安装板21的下方设置有腰型孔与所述弧形滑槽22连接;所述弧形滑槽22可以
在所述转接安装板21的所述腰型孔内上下移动,所述弧形滑槽22两端分别设置有所述烙铁头组件23和所述送丝嘴组件24,所述烙铁头组件23和所述送丝嘴组件24可以在所述弧形滑槽22上移动来调节距离和角度。
31.如图3所示,图3为所述烙铁头组件的结构视图;所述烙铁头组件23包括烙铁头231、烙铁头安装块232、导轨滑块组233、滑块安装板234、导轨安装板235,所述烙铁头231通过所述烙铁头安装块232与所述导轨滑块组233连接,所述导轨滑块组233中的导轨和滑块滑动连接,所述滑块通过所述滑块安装板234与所述烙铁头安装块232连接,所述导轨通过所述导轨安装板235与所述弧形滑槽22连接,弹簧237的两端通过固定螺钉236分别固定在所述滑块安装板234和所述导轨安装板235上。
32.具体的,所述烙铁头安装块232设置为夹持固定在所述烙铁头231上的两夹持块,两所述夹持块通过螺纹连接夹紧所述烙铁头231,故所述烙铁头231可以根据需要,通过轴向移动来调节距离。
33.所述烙铁头安装块232与所述滑块安装板234之间的连接方式为轴孔配合,即所述烙铁头安装块232上设置的光轴插入所述滑块安装板234上设置的光孔中,所述滑块安装板234的所述光孔孔壁上径向有一个贯穿螺纹孔,所述贯穿螺纹孔内螺纹连接有紧定螺钉,通过所述紧定螺钉可以固定所述烙铁头安装块232和所述滑块安装板234的相对角度,所述烙铁头231可以相对于所述滑块安装板234任意角度旋转,即所述烙铁头231既可以相对固定位置转动也可以轴向移动,可以满足多种工况下的调节。
34.所述导轨安装板235一面设置有所述导轨,另一面设置有连接轴,所述连接轴的端面设置有第一螺纹连接孔,第一连接螺钉通过所述第一螺纹连接孔与所述弧形滑槽22固定连接。
35.所述滑块安装板234和所述导轨安装板235两侧均有一所述固定螺钉236,同侧的所述固定螺钉236间用所述弹簧237挂接,弹簧和直线导轨滑块组设计,可以增大烙铁头的弹性和行程,使烙铁头可以始终与焊接部位紧密接触,还可以增加烙铁头的韧性,防止磕碰。
36.如图4所示,图4为所述送丝嘴组件的结构视图;所述送丝嘴组件24包括送丝嘴241、长矩形块242、方矩形块243、长杆244、圆柱块245,所述送丝嘴241固定设置在所述长矩形块242上,所述长矩形块242的一端有第一连接通孔,调节螺钉通过所述第一连接通孔将所述长矩形块242固定在所述方矩形块243侧面,所述长矩形块242位置可以根据需要相对于所述方矩形块243转动。
37.所述方矩形块243侧面(长矩形块安装面)有3个等间距的调节螺纹孔,所述长矩形块242可以根据工况需要选定所要连接的所述调节螺纹孔。
38.所述方矩形块243正面有一个偏心通孔,所述长杆244贯穿所述偏心通孔设置,所述方矩形块243另一侧面有第一锁定螺纹孔,所述第一锁定螺纹孔内螺纹设置有第一锁定螺钉,通过所述第一锁定螺钉固定所述方矩形块24与所述长杆244的相对位置,故所述方矩形块243可以沿着所述长杆244轴向移动,也可以绕着通孔转动。
39.所述圆柱块245的圆柱面上包括一个第二连接通孔和一个第二锁定螺纹孔,所述第二连接通孔和所述第二锁定螺纹孔的轴线垂直相交,所述长杆244设置在所述第二连接通孔内,所述第二锁定螺纹孔内螺纹设置有第二锁定螺钉,通过所述第二锁定螺钉固定所
述圆柱块245与所述长杆244的相对位置,所述长杆244的位置可以根据需要相对于所述圆柱块245发生轴向移动和转动;所述圆柱块245的一个端面设置有第二螺纹连接孔,第二连接螺钉通过所述第二螺纹连接孔与所述弧形滑槽22固定连接。
40.如图5所示,图5为所述送丝单元的结构视图;所述送丝单元3包括锡丝线圈31、送丝机32和安装架33;所述安装架33包括相互拼接固定的第一安装板、第二安装板和第三安装板,所述第一安装板与所述主结构件1的所述第二安装面b连接,所述锡丝线圈31固定设置在所述第二安装板上,所述送丝机32固定设置在所述第三安装板上,所述送丝机32的进丝口靠近所述锡丝线圈31设置,在所述送丝机32内部送丝电机的驱动下将锡丝线从出丝口送入所述送丝嘴241;所述锡丝线圈31可在所述送丝机32的驱动下绕自身的线圈轴空转,也可以沿线圈轴轴向移动。
41.如图6所示,图6为所述图像识别单元的结构视图;所述图像识别单元4包括所述环形光源41、所述相机42、光源安装板43、相机安装板44;所述光源安装板43包括环形板和竖直板,所述环形板和所述竖直板固定连接,所述环形光源41固定设置在所述环形板上,所述竖直板与所述主结构件1的所述第四安装面d连接,所述相机安装板44的一面固定设置有所述相机42,另一面与所述主结构件1的所述第三安装面c连接,所述相机42位于所述环形光源41的正上方,且所述相机42的镜头与所述环形光源41同心设置。
42.以上所述仅为本发明的较佳实施例,对本发明而言仅仅是说明性的,而非限制性的。本专业技术人员理解,在本发明权利要求所限定的精神和范围内可对其进行许多改变,修改,甚至等效,但都将落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1