一种接触轨自动焊接系统的制作方法
1.本发明涉及轨道交通接触轨技术领域,尤其涉及一种接触轨自动焊接系统。
背景技术:
2.轨道交通中,接触轨系统通常沿线路方向设置在列车轨道的两侧,用于向列车供电,接触轨系统包括多个沿线路方向设置的接触轨,通常通过螺旋等紧固件对相邻的接触轨进行机械连接,而这种连接方式会导致接触轨之间的接头处存在缝隙,无法保证接触轨的平顺性。
3.而通过焊接连接接触轨可以改善现有的接触轨连接技术的缺陷,但目前,只能通过人工焊接对相邻的接触轨进行加工,人工加工的效率低下,焊接质量不能得到保证,不同工人加工得到的焊接质量存在极大的波动,对轨道交通的运行存在巨大的安全隐患,同时也增加了施工成本,且不利于后期对接触轨系统的维护。
技术实现要素:
4.本发明提供一种接触轨自动焊接系统,用以解决上述现有技术中的缺陷。
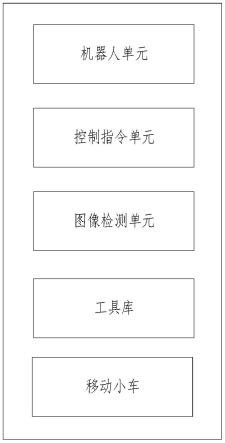
5.本发明提供一种接触轨自动焊接系统,所述系统设置有若干轨道和移动小车,通过所述移动小车带动所有单元在所述轨道上移动,所述系统还包括:机器人单元、图像检测单元、控制指令单元、工具库;
6.其中,所述图像检测单元包括第一定位单元和第二定位单元;所述第一定位单元安装于所述移动小车上,用于检测所述移动小车移动的位置,当检测到所述移动小车到达作业位置时,将信号传递至所述控制指令单元,所述控制指令单元接收到到达信息后控制所述移动小车停车;所述作业位置为所述第一定位单元检测到待加工焊缝后,所述移动小车移动预设距离的位置;
7.所述控制指令单元在所述移动小车到达预设的初始作业位置后,向所述机器人单元发送控制指令,所述机器人单元根据所述控制指令抓取所述第二定位单元,并通过所述第二定位单元获取所述待加工焊缝的三维位置坐标;
8.所述机器人单元将所述三维位置坐标发送至所述控制指令单元,并根据接收到的控制指令从所述工具库中选取对应的工具,并依次执行预设工序。
9.优选的,作业位置为第一定位单元检测到待加工焊缝后,所述小车继续向前移动至距离轨道焊缝距离约为1.5m的位置,当小车运行到距离焊缝1.5m位置处时,通过图像采集单元的第一定位单元确定小车的位置,通过控制指令单元控制小车停车;具体的距离应视实际加工情况决定,不影响本发明技术方案的实施;
10.所述控制指令单元还用于对每个控制指令进行计时,在预设的计时时间范围内执行对应的控制指令,并完成对应的加工工序;
11.在执行完一个待加工焊缝处的预设工序后,所述移动小车带动所述系统移动至下一待加工焊缝。
12.根据本发明提供的一种接触轨自动焊接系统,
13.所述第一定位单元包括2d和/或3d视觉相机,用于检测所述移动小车移动的初定位位置,在所述移动小车到达所述作业位置后向所述控制指令单元发送定位信息;
14.所述第二定位单元用于检测所述待加工焊缝的位置信息,并向控制指令单元输出焊缝的三维位置坐标,从而确定焊接位置处的具体坐标,确定待作业位置的长度、宽度以及深度的三维信息,从而提高机器人加工的精度。
15.根据本发明提供的一种接触轨自动焊接系统,所述预设工序依次包括焊接、打磨和抛光;所述机器人单元在执行焊接、打磨和抛光工序时,分别从所述工具库中抓取预设的焊接工具、打磨工具和抛光工具。根据本发明提供的一种接触轨自动焊接系统,在执行所述焊接工序之前,所述预设工序还包括开坡口,包括:
16.在接触轨接口处,也即所述待加工焊缝处,通过人工或机床加工v形坡口;或,在所述接触轨接口处,即所述待加工焊缝处,所述机器人单元根据控制指令从所述工具库中选取等离子气刨枪,由所述机器人单元操纵等离子气刨枪在所述接触轨接口处加工u形坡口。
17.根据本发明提供的一种接触轨自动焊接系统,在所述机器人单元执行所述抛光工序之后,所述预设工序还包括:
18.对前序工序加工后的已加工焊缝进行检测,并判断焊接是否合格,并生成检测记录;
19.若检测不合格,则所述控制指令单元控制所述移动小车停止移动,并令所述系统暂停工作;
20.若检测合格,则所述控制指令单元控制所述移动小车移动至下一作业位置。
21.根据本发明提供的一种接触轨自动焊接系统,在所述机器人单元执行所述抛光工序之后,所述预设工序还包括:
22.在完成预设数目的待加工焊缝的加工后,对其中的部分或全部的作业位置进行检测,并生成检测记录;
23.若检测不合格,则所述控制指令单元控制所述移动小车停止移动,并令所述系统暂停工作;
24.若检测合格,则所述控制指令单元控制所述移动小车移动至下一作业位置。
25.其中,所述作业位置的检测包括已加工焊缝及接触轨连接位置处的检测;
26.优选的,所述的控制指令均为plc指令。
27.进一步,本发明提供的一种接触轨自动焊接系统还包括hmi人机界面;
28.所述hmi人机界面通过总线通信协议与所述控制指令单元通信连接;用户可通过所述hmi人机界面调整预设工序的类型;
29.所述用户通过所述hmi人机界面可查看所述移动小车的实时位置、所述机器人单元执行的工序以及所述检测记录。
30.根据本发明提供的一种接触轨自动焊接系统,还包括报警单元;在所述机器人从所述工具库中切换工具之前,所述报警单元判断所述工具库中是否存在对应的工具,若不存在,则所述报警单元提示报警信息并将所述机器人单元设置于待机状态,所述机器人单元返回至默认工位;
31.所述报警单元与所述控制指令单元连接;当检测到所述图像采集单元、所述控制
指令单元或工具库故障时,所述报警单元发出警报;
32.所述报警单元还通过所述hmi人机界面显示警报以及对应的故障信息,并显示故障的具体单元。
33.根据本发明提供的一种接触轨自动焊接系统,还包括数据记录单元;在所述机器人单元执行所有控制指令的过程中,所述数据记录单元记录环境温度、定位数据以及执行控制指令的图像信息。
34.根据本发明提供的一种接触轨自动焊接系统,完整的操作工序依次包括开坡口、焊接、打磨、抛光、检测中的一种或多种,本发明对工序的类型不作限定,可以通过本发明提供的系统实现上述工序中的任意一种,也可以通过将本发明提供的焊接系统与人工或其他现有技术相配合的方式来执行设定的工序,工序的类型和数量可视实际加工情况而定。
35.本发明提供的一种接触轨自动焊接系统,通过所述系统设置有若干轨道和移动小车,通过所述移动小车带动所有单元在所述轨道上移动,通过图像检测单元中的第一定位单元,完成对所述移动小车的初定位,并通过机器人抓取图像检测单元中的激光检测头和3d视觉相机以获取待加工焊缝的三维位置坐标,以实现对铁轨上待加工焊缝的精准定位利用机器人单元实现对工具库中多种工具的抓取,并按照预先设置的指令程序实现每一个加工工序从工具库中选取对应的工具,并依次执行控制指令对接触轨执行工序;通过控制指令实现系统内各个单元的协调保证了焊接的效率以及质量的稳定性,且有助于轨道交通施工由人工或半机械化施工向智能建造方向迈进,具有较好的社会效益;同时,自动化施工能够降低人力成本、提高良品率,避免工程浪费,大幅提高施工质量,降低后期运营成本,经济效益显著。
附图说明
36.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
37.图1是本发明提供的接触轨自动焊接系统的结构示意图。
具体实施方式
38.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.在一个实施例中,如图1所示,本发明提供一种接触轨自动焊接系统,所述系统设置在移动小车上,通过所述移动小车带动所述系统在轨道上移动,所述系统还包括:机器人单元、图像检测单元、控制指令单元、计时单元、工具库;
40.其中,所述图像检测单元包括第一定位单元和第二定位单元;所述第一定位单元安装于所述移动小车上,用于检测所述移动小车移动的位置,当检测到所述移动小车到达作业位置时,将信号传递至所述控制指令单元,所述控制指令单元接收到到达信息后控制
所述移动小车停车;所述作业位置为所述第一定位单元检测到待加工焊缝后,所述移动小车移动预设距离的位置;
41.所述控制指令单元在所述移动小车到达预设的作业位置后,向所述机器人单元发送控制指令,所述机器人单元根据所述控制指令抓取所述第二定位单元,并通过所述第二定位单元获取所述待加工焊缝的三维位置坐标;
42.所述机器人单元将所述三维位置坐标发送至所述控制指令单元,并根据接收到的控制指令从所述工具库中选取对应的工具,并依次执行预设工序。
43.所述控制指令单元还用于对每个控制指令进行计时,在预设的计时时间范围内执行对应的控制指令;
44.优选的,作业位置为轨道上距离轨道焊缝距离约为1.5m的位置,当小车运行到距离焊缝1.5m位置处时,通过图像采集单元确定小车的位置,通过控制指令单元控制小车停车;其中,当小车上的第一定位单位检测到待加工焊缝后,继续向前移动至距离焊缝预设距离位置处时,机器人单元抓取图像检测单元中的第二定位单元用于检测焊缝的三维位置,直至获取焊缝位置处的三位位置坐标,获取该处的长度、宽度以及高度的三维位置信息并传输至控制指令单元以便精确执行后续的加工工序;可以理解的是,机器人单元包括机械臂和夹爪,以机器人单元在当前的位置可以通过机械臂和夹爪抓取的工具可以对焊缝位置进行加工为准;
45.优选的,所述控制指令为plc指令;
46.一般的,所述预设工序依次包括焊接、打磨和抛光;所述机器人单元在执行焊接、打磨和抛光工序时,分别从所述工具库中抓取预设的焊接工具、打磨工具和抛光工具;
47.具体的,本发明提供的一种接触轨自动焊接系统包括:移动小车、多功能机器人、数控等离子气刨机构、集装箱、焊接设备、3d视觉相机、检测仪、夹具、电气控制系统和数据系统等;
48.其中移动小车装载所有系统中的工作单元,包括上述的机器人单元、图像检测单元、控制指令单元、工具库;机器人单元、图像检测单元、控制指令单元、工具库均安置在集装箱中,供移动小车带动在接触轨上移动;电气控制系统用于对机器人单元、控制指令单元等相关设备进行整体控制,还用于实现移动小车的移速控制和制动控制;
49.可选的,移栽小车的移动可以通过导轨、液压或者气压系统实现;
50.可选的,机器人单元具备至少一个夹爪或吸盘,用于抓取工具库中的工具;
51.需要说明的是,控制指令单元中的程序可以根据加工的需要进行调整,优选plc控制程序作为控制指令,plc具有易于修改、适配性高、系统设计维护工作量小的特点,便于根据不同的加工需要对程序进行快速编辑,从而有利于实现接触轨加工焊接的自动化;
52.可选的,所述工具库中包括但不限于等离子枪、焊接枪、打磨工具和抛光工具中的一种或多种;此外,打磨工具和抛光工具可集成于一个装置也可单独分开使用;
53.可选的,所述第一定位单元包括2d和/或3d视觉相机,用于检测所述移动小车移动的初定位位置,在所述移动小车到达所述作业位置后向所述控制指令单元发送定位信息;其中第一定位单元优选3d视觉相机,本发明对此不作限定;
54.优选的,所述第二定位单元包括激光检测头和3d视觉相机,用于检测所述待加工焊缝的位置信息,并向控制指令单元提供焊缝的三维位置坐标;本发明对此不作限定,第二
定位单元只需要获取待加工焊缝的具体三维位置信息,具体的设备类型不影响本发明技术方案的实施;
55.第二定位单元可供机器人单元的夹爪或吸盘进行抓取,可以放置于工具库内,也可安装于所述移动小车上,本发明对此不作限定
56.优选的,在移动小车运行过程中,通过第一定位单元实时确定小车距离待加工焊缝的距离,在距焊缝处一定距离时,所述移动小车开始制动减速,直至到达作业位置时停止;
57.具体的,在将移动小车上的第一定位单元检测到待加工焊缝的位置后,继续向前移动至预设距离处或预设的作业位置时,机器人单元的夹爪从工具库中选取工具,切换成3d视觉相机与激光检测头,进行自动拍照、运算,并生成指定座标点位,将信号输送给plc执行预设工序;
58.所述预设工序依次包括焊接、打磨和抛光;所述机器人单元在执行焊接、打磨和抛光工序时,分别从所述工具库中抓取预设的焊接工具、打磨工具和抛光工具;
59.可选的,机器人单元与控制指令单元通过profinet通讯实现指令和信号的传输,还可以通过位置传感器等确认机器人单元的夹爪将抓取的工具夹紧到位,在确定了机器人单元的机械臂夹爪的工具产生到位信号后,再由控制指令单元确认下达plc指令执行后续的焊接操作,进一步提高了自动化操作的可靠度;
60.可选的,在执行所述焊接工序之前,所述预设工序还包括开坡口,在接触轨接口处通过人工或机床加工v形坡口;
61.或,在所述接触轨接口处,所述机器人单元根据控制指令从所述工具库中选取等离子气刨枪,由所述机器人单元操纵等离子气刨枪在所述接触轨接口处加工u形坡口。
62.在计时单元计时完毕,确认加工完成所述坡口后,机器人单元返回至初始位置等待控制指令单元的下一步指令;
63.进一步,所述机器人单元根据plc指令从所述工具库中切换焊接枪,机器人夹爪处的位置传感器确认夹紧抓取的等离子枪之后,由所述机器人单元操纵焊接枪将开坡口处进行焊接,在计时单元计时完毕,确认焊接完成所述坡口后,机器人单元返回至初始位置等待控制指令单元的下一步指令;
64.进一步,所述机器人单元根据plc指令从所述工具库中切换打磨工具,机器人夹爪处的位置传感器确认夹紧抓取的打磨工具之后,由所述机器人单元操纵打磨工具焊接处进行打磨,在计时单元计时完毕,确认打磨完成所述坡口后,机器人单元返回至初始位置等待控制指令单元的下一步指令;
65.可选的,本发明提供的接触轨自动焊接系统还包括水箱系统,在打磨工序的同时,水箱系统根据控制指令单元的指令开启水循环,在打磨的同时进行冷却;
66.可选的,所述水箱系统还与报警单元连接,在打磨工序之前,检测水箱系统内水位是否低于警戒位,若低于警戒位,发出警报,提示工作人员补充冷却用水;
67.进一步,在所述机器人单元执行所述抛光工序之后,所述预设工序还包括:
68.对前序工序加工后的焊缝进行检测,并判断焊接是否合格,并生成检测记录;
69.若检测不合格,则所述控制指令单元控制所述移动小车停止移动,并令所述系统暂停工作;
70.若检测合格,则所述控制指令单元控制所述移动小车移动至下一作业位置。
71.可选的,在完成预设数目的待加工焊缝的加工后,对其中的部分或全部的作业位置进行检测,并生成检测记录;
72.需要说明的是,可以通过人工对加工后的焊缝进行检测,或者通过机器人单元抓取图像检测单元或工具库中的检测头对待加工焊缝进行检测;
73.可选的,在完成多个批次的待加工焊缝的加工后,抽取其中的部分作业位置进行检测;或按预设每间隔一定数目的作业位置实时对部分作业位置进行检测,以提高整体加工工序的运行效率;
74.可选的,检测的类型包括探伤检测和外观检测,通过探伤检测对焊接的结构进行探测,查探是否存在结构性损伤;通过外观检测探测焊接表面是否存在裂纹、磨损等损伤;本发明对此不作限定,可以根据现场需要选择合适的工具进行探伤检测和/或外观检测;
75.具体的,在系统运行过程中,会产生大量的数据,所有数据信息包括环境温度、视觉初检定位、精确定位、坡口加工记录、焊缝图像、焊缝检测结果等以及操作信息等均会被数据系统记录,形成清晰完整的施工日志;
76.可选的,本发明提供的一种接触轨自动焊接系统还包括hmi人机界面;
77.所述hmi人机界面通过总线通信协议与所述控制指令单元通信连接;用户可通过所述hmi人机界面调整预设工序的类型;
78.所述用户通过所述hmi人机界面可查看所述移动小车的实时位置、所述机器人单元执行的工序以及所述检测记录;
79.需要说明的是,hmi为human machine interface,即人机界面,是系统和用户之间进行交互和信息交换的媒介,它实现信息的内部形式与用户可以接受形式之间的转换;
80.通过人机界面可以实现用户对系统的实时监测和调整,更便于用户在第一时间内对故障等突发情况作出改进,通过人机界面可以实现对工序的调整,控制整体焊接项目的运行,实时获取焊接各个工序的进度;
81.可选的,本发明提供的一种接触轨自动焊接系统还包括报警单元;在所述机器人从所述工具库中切换工具之前,所述报警单元判断所述工具库是否存在选用的工具,若不存在,则所述报警单元提示报警信息并将所述机器人单元设置于待机状态,所述机器人单元返回至加工工位;
82.所述报警单元与所述控制指令单元连接;当检测到所述图像采集单元、所述控制指令单元或工具库故障时,所述报警单元发出警报;
83.所述报警单元还通过所述hmi人机界面显示警报以及对应的故障信息,并显示故障的具体单元。
84.可选的,本发明提供的一种接触轨自动焊接系统还包括数据记录单元;在所述机器人单元执行所有plc指令的过程中,所述数据记录单元记录环境温度、定位数据以及执行plc指令的图像信息。
85.进一步,在所述机器人单元执行完所有plc指令后,所述移动小车带动所有单元在所述轨道上移动至下一作业位置;具体的,在完成了当前初始作业位置的所有预设加工工序后,移动小车搭载所有单元,将设备输送到导电轨的下一接口处,并按照控制指令单元设定的plc程序重复执行设定的加工工序。
86.在一个实施例中,一个工况示例具体包括:
87.加工工件名称:接触轨;
88.工件材料:不锈钢10cr17;
89.工艺过程:初检定位接口-3d视觉与激光精准检测定位点-开v型坡口-焊接-打磨-抛光-检测;
90.焊缝形式:对接,v型或u型坡口;
91.焊接方式:二氧化碳气体保焊;
92.焊缝质量要求:按焊接工艺评定质量标准要求;
93.工件焊前状态:轨道对接形式;
94.焊缝外形尺寸:焊接接头表面光滑,两边表面没有凸起、圆滑过渡;
95.工件总长:每15米一个焊缝;
96.完工要求:焊接接头平整、光滑、焊接熔深5.5-6mm;
97.总工作节拍:410秒/1件。
98.对于上述的工况,设定的工作步骤包括:
99.1.移动小车搭载所有单元至设定的加工地点,机器人单元通过3d视觉相机初步检测移动小车的位置,在加工工位处接口停车,大约耗时为10s;
100.2.机器人单元通过3d视觉与激光检测精准定位确认加工点位,获取待加工焊缝处的三维位置坐标,大约25s;
101.3.根据上述工况预设控制指令单元的plc程序指令,通过机器人单元选取工具库中的工具,进而进行全自动铣削,在加工处开v(u)型破口,大约150s;
102.4.通过机器人单元选取工具库中的工具进行自动焊接,大约50s;
103.可选的,机器人单元选用的机器人可以为关节式机器人和/或坐标式机器人;
104.5.通过机器人单元选取工具库中的工具进行自动打磨,大约120s;
105.6.通过机器人单元选取工具库中的工具进行自动抛光,大约40s;
106.7.在完成其他plc指令设定的操作工序后,通过机器人单元选取工具库中的工具自动作检测,大约15s;
107.8.在完成了当前初始作业位置的焊接等操作后,移动小车搭载所有单元移动至下一工作作业位置,并重复上述的步骤1-7;
108.上述的实施例仅作为本发明的一个示例,不应视为对本发明的进一步限定。
109.以上所描述的装置实施例仅仅是示意性的,其中所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性的劳动的情况下,即可以理解并实施。
110.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施
例或者实施例的某些部分所述的方法。
111.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1