一种机器人焊接工件的轮廓测量与识别系统的制作方法
1.本发明涉及焊接机器人技术领域,具体为一种机器人焊接工件的轮廓测量与识别系统。
背景技术:
2.焊接机器人是从事焊接的工业机器人。根据国际标准化组织工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊枪的,使之能进行焊接,切割或热喷涂,在焊接机器人运行时需要用到轮廓测量与识别系统,但是现有的轮廓测量与识别系统在使用时,不具备待焊工件空间位置自适应能力,不能够实现焊接工件、焊缝轨迹的检测、识别与精准定位,且不能够焊缝进行纠偏,焊接机器人对作业条件变化的适应性较差。
3.现有技术中轮廓测量与识别系统存在的缺陷是:
4.1、专利文件cn110524581a公开了一种柔性焊接机器人系统及其焊接方法,“包括:全局视觉单元识别待焊接工件图像信息并定位待焊接工件位置;柔性焊接机器人单元通过精定位视觉组件对待焊接工件位置进行精确识别,图像处理控制机解算焊接路径,柔性焊接机器人进行焊接作业;柔性检测机器人单元通过立体视觉检测组件识别已焊接工件外形几何尺寸及质量,根据用户设置的参数信息生成焊接质量报告,并将焊接偏差超过阈值位置及偏差量信息传递至柔性焊接机器人进行补焊;总控单元执行图像处理、数据通信以及焊接机器人和检测机器人的运动控制;工作台单元对不同种类焊接工件的快速装夹。解决了焊接作业对工人身体造成的危害,实现了柔性焊接机器人系统的高度柔性、智能化”但是在使用时,不具备待焊工件空间位置自适应能力,不能够实现焊接工件、焊缝轨迹的检测、识别与精准定位,且不能够焊缝进行纠偏,焊接机器人对作业条件变化的适应性较差。
技术实现要素:
5.本发明的目的在于提供一种机器人焊接工件的轮廓测量与识别系统,以解决上述背景技术中提出的问题。
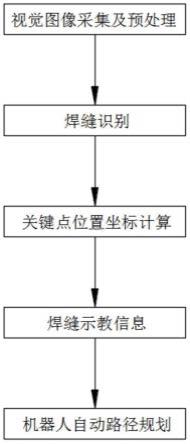
6.为实现上述目的,本发明提供如下技术方案,一种机器人焊接工件的轮廓测量与识别系统,所述包括以下步骤:(1)对图像采集及预处理;(2) 通过视觉传感器和激光传感器焊缝识别;(3)通过对关键点位置坐标计算; (4)通过对待焊工件的焊缝图像进行图像处理形成焊缝示教信息;(5)机器人自动路径规划。
7.优选的,所述步骤(1)和(5)中,通过机器视觉的图像处理和焊缝寻位算法,通过对待焊工件的焊缝图像进行图像处理、计算焊缝起始、终点位置坐标,形成焊缝示教信息。
8.优选的,所述步骤(2)中,通过上位机将关键点位空间位置坐标处理为机器人示教信息,引导机器人焊枪末端运动到待焊位置,使焊接机器人具备待焊工件空间位置自适应
能力,实现焊接机器人机器视觉智能焊缝寻位。
9.优选的,所述步骤(3)中,通过建立基于深度学习模型(深度信念网络、卷积神经网络和递归神经网络多层感知机)的视觉识别与定位算法,结合边界像素检测算法,并采用双相机视觉系统实现焊接工件、焊缝轨迹的检测、识别与精准定位,基于轮廓特征的点集配准方法icp算法,实现三维要素的轮廓特征或点集的准确匹配及快速识别,利用迭代一步步地算出正确对应关系,多视角配准,实现机器人焊接工件的轮廓测量与识别。
10.优选的,所述步骤(4)中,在机器人焊接系统中集成视觉传感器和激光传感器,实现中厚板多层多道焊过程中的焊缝跟踪和激光纠偏机通过视觉传感进行焊缝跟踪实现实时调整焊接末端运动状态,通过激光传感器实现焊缝纠偏。
11.与现有技术相比,本发明的有益效果如下:
12.1、本发明通过上位机将关键点位空间位置坐标处理为机器人示教信息,引导机器人焊枪末端运动到待焊位置,使焊接机器人具备待焊工件空间位置自适应能力,实现焊接机器人机器视觉智能焊缝寻位,通过建立基于深度学习模型的视觉识别与定位算法,结合边界像素检测算法,并采用双相机视觉系统实现焊接工件、焊缝轨迹的检测、识别与精准定位。
13.2、本发明在机器人焊接系统中集成视觉传感器和激光传感器,实现中厚板多层多道焊过程中的焊缝跟踪和激光纠偏。通过视觉传感进行焊缝跟踪实现实时调整焊接末端运动状态,通过激光传感器实现焊缝纠偏,提高焊接过程中机器人对作业条件变化的适应性,改善焊接过程的运动精度和焊接质量。
附图说明
14.图1为本发明的轮廓测量与识别系统流程示意图。
具体实施方式
15.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
17.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
18.请参阅图1,一种机器人焊接工件的轮廓测量与识别系统;
19.实施例一:一种机器人焊接工件的轮廓测量与识别系统,所述包括以下步骤:对图像采集及预处理;(2)通过视觉传感器和激光传感器焊缝识别; (3)通过对关键点位置坐标计算;(4)通过对待焊工件的焊缝图像进行图像处理形成焊缝示教信息;(5)机器人自动路径规划。
20.所述步骤(1)和(5)中,通过机器视觉的图像处理和焊缝寻位算法,通过对待焊工件的焊缝图像进行图像处理、计算焊缝起始、终点位置坐标,形成焊缝示教信息。
21.所述步骤(2)中,通过上位机将关键点位空间位置坐标处理为机器人示教信息,引导机器人焊枪末端运动到待焊位置,使焊接机器人具备待焊工件空间位置自适应能力,实现焊接机器人机器视觉智能焊缝寻位。
22.所述步骤(3)中,通过建立基于深度学习模型(深度信念网络、卷积神经网络和递归神经网络多层感知机)的视觉识别与定位算法,结合边界像素检测算法,并采用双相机视觉系统实现焊接工件、焊缝轨迹的检测、识别与精准定位,基于轮廓特征的点集配准方法icp算法,实现三维要素的轮廓特征或点集的准确匹配及快速识别,利用迭代一步步地算出正确对应关系,多视角配准,实现机器人焊接工件的轮廓测量与识别。
23.所述步骤(4)中,在机器人焊接系统中集成视觉传感器和激光传感器,实现中厚板多层多道焊过程中的焊缝跟踪和激光纠偏机通过视觉传感进行焊缝跟踪实现实时调整焊接末端运动状态,通过激光传感器实现焊缝纠偏,提高焊接过程中机器人对作业条件变化的适应性,改善焊接过程的运动精度和焊接质量。
24.通过搭建实验平台,进行焊缝跟踪实验,首先控制机器人以1mm/s的速度扫描焊缝并获取结构光焊缝图像,结合每次拍摄图像时机器人工具点坐标与结构光焊缝图像的处理结果,计算焊缝的实际位置,对10组随机焊缝跟踪情况的数据进行分析,系统在对于x轴、y轴方向的跟踪精度较高,总体平均误差在0.1mm以内,而在z轴方向的跟踪误差较大,总体平均误差为0.19mm,能够满足中厚板v型角接焊缝跟踪的精度要求。
25.请参阅图1,一种机器人焊接工件的轮廓测量与识别系统;
26.实施例二:一种机器人焊接工件的轮廓测量与识别系统,所述包括以下步骤:对图像采集及预处理;(2)通过视觉传感器和激光传感器焊缝识别; (3)通过对关键点位置坐标计算;(4)通过对待焊工件的焊缝图像进行图像处理形成焊缝示教信息;(5)机器人自动路径规划。
27.所述步骤(1)和(5)中,通过机器视觉的图像处理和焊缝寻位算法,通过对待焊工件的焊缝图像进行图像处理、计算焊缝起始、终点位置坐标,形成焊缝示教信息。
28.所述步骤(2)中,通过上位机将关键点位空间位置坐标处理为机器人示教信息,引导机器人焊枪末端运动到待焊位置,使焊接机器人具备待焊工件空间位置自适应能力,实现焊接机器人机器视觉智能焊缝寻位。
29.所述步骤(3)中,通过建立基于深度学习模型(深度信念网络、卷积神经网络和递归神经网络多层感知机)的视觉识别与定位算法,结合边界像素检测算法,并采用双相机视觉系统实现焊接工件、焊缝轨迹的检测、识别与精准定位,基于轮廓特征的点集配准方法icp算法,实现三维要素的轮廓特征或点集的准确匹配及快速识别,利用迭代一步步地算出正确对应关系,多视角配准,实现机器人焊接工件的轮廓测量与识别。
30.所述步骤(4)中,在机器人焊接系统中集成视觉传感器和激光传感器,实现中厚板
多层多道焊过程中的焊缝跟踪和激光纠偏机通过视觉传感进行焊缝跟踪实现实时调整焊接末端运动状态,通过激光传感器实现焊缝纠偏
31.通过搭建实验平台,进行焊缝跟踪实验,首先控制机器人以5mm/s的速度扫描焊缝并获取结构光焊缝图像,结合每次拍摄图像时机器人工具点坐标与结构光焊缝图像的处理结果,计算焊缝的实际位置,对10组随机焊缝跟踪情况的数据进行分析,系统在对于x轴、y轴方向的跟踪精度较高,总体平均误差在0.5mm以内,而在z轴方向的跟踪误差较大,总体平均误差为0.95mm,能够满足中厚板v型角接焊缝跟踪的精度要求。
32.请参阅图1,一种机器人焊接工件的轮廓测量与识别系统;
33.实施例三:一种机器人焊接工件的轮廓测量与识别系统,所述包括以下步骤:对图像采集及预处理;(2)通过视觉传感器和激光传感器焊缝识别; (3)通过对关键点位置坐标计算;(4)通过对待焊工件的焊缝图像进行图像处理形成焊缝示教信息;(5)机器人自动路径规划。
34.所述步骤(1)和(5)中,通过机器视觉的图像处理和焊缝寻位算法,通过对待焊工件的焊缝图像进行图像处理、计算焊缝起始、终点位置坐标,形成焊缝示教信息。
35.所述步骤(2)中,通过上位机将关键点位空间位置坐标处理为机器人示教信息,引导机器人焊枪末端运动到待焊位置,使焊接机器人具备待焊工件空间位置自适应能力,实现焊接机器人机器视觉智能焊缝寻位。
36.所述步骤(3)中,通过建立基于深度学习模型(深度信念网络、卷积神经网络和递归神经网络多层感知机)的视觉识别与定位算法,结合边界像素检测算法,并采用双相机视觉系统实现焊接工件、焊缝轨迹的检测、识别与精准定位,基于轮廓特征的点集配准方法icp算法,实现三维要素的轮廓特征或点集的准确匹配及快速识别,利用迭代一步步地算出正确对应关系,多视角配准,实现机器人焊接工件的轮廓测量与识别。
37.所述步骤(4)中,在机器人焊接系统中集成视觉传感器和激光传感器,实现中厚板多层多道焊过程中的焊缝跟踪和激光纠偏机通过视觉传感进行焊缝跟踪实现实时调整焊接末端运动状态,通过激光传感器实现焊缝纠偏,提高焊接过程中机器人对作业条件变化的适应性,改善焊接过程的运动精度和焊接质量。
38.通过搭建实验平台,进行焊缝跟踪实验,首先控制机器人以10mm/s的速度扫描焊缝并获取结构光焊缝图像,结合每次拍摄图像时机器人工具点坐标与结构光焊缝图像的处理结果,计算焊缝的实际位置。对10组随机焊缝跟踪情况的数据进行分析,系统在对于x轴、y轴方向的跟踪精度较高,总体平均误差在1mm以内,而在z轴方向的跟踪误差较大,总体平均误差为1.9mm,能够满足中厚板v型角接焊缝跟踪的精度要求。
39.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1