移动两个用于加工电路板的焊接组件的移动单元及具有其的用于选择性波峰焊的焊接系统的制作方法
1.本发明涉及一种移动单元,该移动单元用于移动两个焊接组件,这两个焊接组件沿着x轴和与之垂直延伸的y轴可移动地布置,以便加工电路板。为了加工电路板,焊接组件可以各自具有焊接装置(特别是具有焊接喷嘴的焊接炉)、喷射单元(焊剂涂敷器)、相机和/或清洁单元或由其形成。此外,提供用于沿着x轴和/或y轴移动焊接组件的轴驱动器。本发明还涉及一种具有这种移动单元的焊接系统。
背景技术:
2.在接触例如借助于通孔技术(tht)从电路板的上侧穿过电路板中的孔而紧固的电子部件的领域中,已知从电路板的下侧接触部件。
3.已知用于通过焊接来接触各个引脚或引脚列的所谓的选择性波峰焊,其中,待接触的电路板或引脚精确地定位在具有焊接装置的焊接组件上方,该焊接装置包括液态焊接的驻波。在焊接过程之前,还已知在所谓的助焊期间使用喷射单元首先将焊剂喷射到待焊接的引脚/引脚列上,以便改善焊接的润湿,其中,然后通过点焊来焊接各个引脚或引脚列。
4.从ep 3153 270b1中已知提供两个焊接组件,这两个焊接组件可借助于可控的致动装置而彼此独立地沿着x轴、y轴和z轴移动。尽管这种结构允许电路板的非常灵活的加工,但是实现整体上非常昂贵。特别地,焊接组件的绝对同步移动在技术上仅能以很高的费用实现。
5.从de 10 2004 063 488a1中,已知一种具有权利要求1的前序部分的特征的移动单元。移动单元具有托架,该托架可沿着x轴移动,并且在该托架上布置有可沿着y轴移动的桥。两个焊接组件位于桥上,使得两个焊接组件可以沿着x轴和y轴自由定位。焊接组件也可以经由致动装置在z方向上移动。
技术实现要素:
6.本发明所提出的问题是开发最初描述的移动单元,使得电路板可以灵活地加工,其中,也以简单的方式使焊接组件的同步移动总体上成为可能。
7.该问题通过具有权利要求1的特征的移动单元来解决。
8.因此,规定,为至少两个焊接组件中的每一个提供一个滑架。由此,至少两个焊接组件中的每一个可以布置在其自己的滑架上。为了加工电路板,焊接组件可以各自具有焊接装置(特别是具有焊接喷嘴的焊接炉)、喷射单元(焊剂涂敷器)、相机和/或清洁单元或由其形成。此外,至少两个滑架被布置为可在公共线性引导件上沿着x轴或y轴移动,其中,至少两个滑架借助于联接装置连接到彼此,使得当滑架中的一个通过轴驱动器移动时,至少另一个滑架也移动。通过提供允许两个滑架刚性连接的联接装置,可以使滑架沿着x轴或y轴同步移动成为可能。由此,特别地规定,仅一个滑架借助于轴驱动器直接驱动;另一个滑架仅经由联接装置移动。因此,也可以只提供一个轴驱动器,利用该轴驱动器,两个焊接组
件由于它们联接到联接装置而可以沿着x轴或y轴移动。
9.设置在两个滑架之间的联接装置可设计为使得其设计成调节至少两个滑架之间的距离。根据待加工的电路板,两个滑架以及由此两个焊接组件可以在x方向和/或y方向上具有不同的距离。
10.联接装置可以手动调节或者经由联接装置一侧的驱动器调节。
11.可以想到,联接装置被设计为使得至少两个滑架之间的距离在移动单元的操作期间是可调节的。为了调节该距离,联接装置可以提供可控制的驱动器,例如电动机。如果在操作期间连续加工不同尺寸的电路板,则可以根据待加工的电路板而改变滑架之间的距离以及由此改变焊接组件之间的距离。
12.驱动器的控制也可以被设计为使得两个滑架在加工期间不同步地移动,这可以通过适当地调节联接装置来实现。根据该设计,由于轴驱动器和联接装置的驱动器的叠加移动,两个滑架因此可以独立地且不同地在x方向或y方向上移动。
13.联接装置可包括可旋转的主轴杆,该主轴杆与设置在两个滑架中的至少一个上的至少一个主轴螺母相互作用,以便调节至少两个滑架之间的距离。通过转动例如可由电动机驱动的主轴杆,两个滑架之间的距离变化。例如,主轴杆可以在一端可旋转地安装在滑架上,并且在另一端安装在另一滑架上的主轴螺母中;可以想到,主轴杆借助于主轴螺母安装在两个滑架上,其中,主轴杆提供与一个螺母相互作用的右旋螺纹和与另一个螺母相互作用的左旋螺纹。
14.在另一实施例中,联接装置可包括齿条,该齿条与设置在两个滑架中的至少一个上的至少一个调节小齿轮相互作用,以便调节至少两个滑架之间的距离。例如,齿条可以在一端牢固地紧固到滑架上,而在另一端与小齿轮相互作用。通过转动小齿轮(这可以通过电机来完成),两个滑架之间的距离相应地变化。
15.在另外实施例中,联接装置包括可驱动、优选封闭的皮带,该皮带与至少两个滑架相互作用,以便调节至少两个滑架之间的距离。可以想到,皮带由皮带驱动器驱动,该皮带驱动器可以由电机驱动,使得当皮带驱动器被致动时,至少两个滑架朝向彼此或远离彼此移动。
16.还可以想到,提供距离测量装置,利用该距离测量装置可以确定两个滑架之间的距离,由此可以确定两个焊接组件之间的距离。准确地说,当提供用于调节滑架之间的距离的电机驱动器时,两个滑架之间的限定距离可经由控制回路来指定。
17.还有利的是,联接装置包括至少一个弹簧元件,该弹簧元件将一个滑架推向至少一个其它滑架或推离至少一个其它滑架,使得至少两个滑架之间的距离抵抗至少一个弹簧元件的预拉伸而被调节。因此,可以想到两个滑架相对于彼此的精确定位。
18.线性引导件可以设计为使得其包括一个、两个或多个相互平行延伸的导轨。导轨可以具有一定距离,使得甚至更大或更重的焊接组件可以在x方向或y方向上安全地移动。
19.此外,有利的是,用于移动至少一个滑架的轴驱动器设置在线性引导件的自由端处,或者设置在至少一个导轨的自由端处。在这种情况下,驱动器可包括皮带,该皮带在线性引导件内且优选地在导轨内运行,并且运动地联接到至少一个滑架。
20.还可以想到,线性引导件本身借助于支承元件可移动地安装在垂直于线性引导件延伸的横向引导件上。特别地,如果线性引导件沿着x轴延伸,则横向引导件沿着y轴延伸。
相反地,可以想到,如果线性引导件沿着y轴延伸,则横向引导件沿着x轴延伸。通过叠加在x方向和y方向上的移动,两个焊接组件可以自由地定位,特别是同步地定位。如果联接装置具有其自身的驱动器,则两个滑架中的至少一个可以通过适当地控制驱动器而进行x方向或y方向上的叠加移动。
21.与线性引导件相对应,横向引导件可以包括一个、两个或多个彼此平行延伸的导轨。已经证明有利的是,设置三个导轨并且在中间的导轨上设置对应的轴驱动器,以便使线性引导件沿着横向移动。轴驱动器可包括电动机和由电动机驱动的封闭的皮带,所述皮带优选地布置为在横向引导件或横向引导件的导轨内运行。
22.还有利的是,焊接组件各自布置为可在相应的滑架上沿着垂直于x轴和y轴延伸的z轴彼此独立地移动,并且在各个滑架上设置可单独控制的z轴驱动器。结果,至少两个焊接组件可以在z方向上(即在竖向上)彼此独立地升高或降低。
23.最初提出的问题还通过一种用于电路板的选择性波峰焊的焊接系统来解决,其中,电路板可沿着沿x轴延伸的移动方向输送通过焊接装置,并且其中,焊接系统具有根据本发明的用于移动至少两个焊接组件的移动单元。
24.最初提出的问题还通过一种用于操作根据本发明的移动单元或根据本发明的焊接系统的方法来解决,其中,具有两个焊接组件的至少两个滑架沿着x轴或y轴在公共线性引导件上移动,并且其中,借助于两个焊接组件同时加工各个电路板。
附图说明
25.本发明的另外细节和有利实施例可以在以下描述中找到,基于该描述,将更详细地描述和说明本发明的一个实施例。
26.在附图中:
27.图1是用于选择性波峰焊的焊接系统的示意性表示的侧视图;
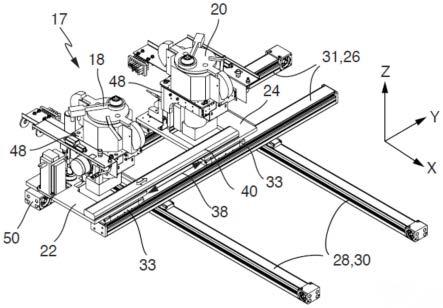
28.图2是用于根据图1的波峰焊系统的移动单元的等距视图;
29.图3示出了根据图2的处于不同操作位置的移动单元;以及
30.图4示出了如图2或图3所示的联接装置的纵向截面。
具体实施方式
31.图1中示意性示出的用于波峰焊的焊接系统10具有装置12,该装置12用于沿着在x轴方向上延伸的输送方向16输送装配有电子部件的电路板14。y轴垂直于x轴且垂直于页面平面延伸。z轴垂直于x轴和y轴延伸。为了简单起见,未示出电路板14上的电子部件。
32.输送装置12例如可以包括链式传送机,该链式传送机连续循环,并且在该链式传送机上安装电路板14并且在其纵向侧边缘的区域中引导电路板,使得电路板14的下侧基本上可自由触及。
33.移动单元17设置在输送装置14的下方,包括两个焊接组件18、20,这两个焊接组件在y方向上一个接一个地布置,使得在图1中仅可以看到焊接组件18、20中的一个;后焊接组件20被前焊接组件18覆盖。特别地,焊接组件18、20是具有炉和焊接喷嘴的焊接装置,如图2和图3所示。
34.焊接组件18、20中的每一个各自布置在其自身的滑架22上,其中,滑架22、24可在
公共线性引导件26上沿着y轴移动。线性引导件26本身被布置为可在横向引导件28上沿着x轴移动。
35.虽然在图1中仅示意性地示出了移动单元17,但是图2和图3示出了处于两种不同操作状态的移动单元17。
36.如从图2和图3中清楚的,移动单元17包括具有两个彼此平行延伸的导轨30的横向引导件28。又具有两个导轨31的线性引导件26垂直于横向引导件28沿着y轴设置。
37.为了使线性引导件26在横向引导件28上以尽可能小的摩擦移动,可以在导轨30与导轨31之间设置支承元件33。对应地,支承元件33可以设置在滑架22和24与线性引导件26的导轨31之间。支承元件特别可以具有滚动元件,以便实现各个部件的无间隙的且低摩擦的可移动性。
38.横向引导件28的沿着x轴延伸的导轨30优选以固定的方式布置。横向引导件28具有两个可同步控制的轴驱动器32,其设置在横向引导件28的导轨30的自由端上。轴驱动器32可提供循环皮带,该循环皮带在导轨30内运行并且联接到线性引导件26或其导轨31,使得线性引导件26本身可沿着x轴移动。
39.在直线引导件26或相关联的导轨31上,两个滑架22、24被布置为可沿着y轴移动。
40.为了联接两个滑架22、24的移动,设置联接装置40,其在一侧上接合在滑架22中,并且在另一侧上接合在滑架24中。联接装置40被设计为使得其可用于调节两个滑架22、24之间的距离38(参见图4与相关联的描述)。在图2中,距离38被调节为使得其最小或等于零;图3示出了两个滑架22、24之间的几厘米的相对大的距离38。
41.在两个滑架22、24中的每一个上设置焊接组件18,各个滑架包括焊接炉44和设置在焊接炉44上的焊接喷嘴46。焊接组件18被设计为使得其可以用于从下方将电子部件焊接在电路板14上。在操作期间,液态焊接的驻波从焊接喷嘴46中出现,并经由移动单元17定位,使得要焊接的组件或其要接触的引脚或引脚列借助于焊接波焊接。
42.在图1、图2和图3所示的实施例中,焊接组件18包括具有焊接喷嘴46的相应的焊接炉44。可以想到,除了焊接炉44之外或者代替该焊接炉,还提供了用于将焊剂喷射到电路板14上的喷射单元(焊剂涂敷器)、用于检测电路板的下侧的相机和/或用于在焊接过程之前和/或之后清洁电路板的下侧的清洁单元。
43.焊接组件18在滑架22、24上的布置使得焊接组件在相应的滑架22、24上沿着垂直于y轴和x轴布置的z轴可彼此独立地移动。为此,在滑架22、24上设置了合适的z轴驱动器48。
44.在线性引导件26的至少一个导轨31上设置y轴驱动器50,用于沿着y轴移动滑架22、24。与轴驱动器32相对应,轴驱动器50可以具有电动机和封闭的皮带,该封闭的皮带在对应的导轨31内运行,并且与两个滑架22、24中的一个运动联接。因此,如果y轴驱动器50被启动,则直接联接到y轴驱动器50的滑架22被驱动。由于联接装置40,当滑架22移动时,滑架24同步移动。
45.两个滑架22、24在y方向上的移动基本上是同步的。然而,可以想到,在一个滑架22的移动期间借助于联接装置40来调节两个滑架22、24之间的距离38,使得滑架24相对于滑架22移动。
46.图4示出了具有两个滑架22、24的可以想到的联接装置40的沿着y轴的纵向截面。
两个滑架22、24在y方向上具有距离38。联接装置40具有可借助于电动机52旋转的主轴杆54。主轴杆54具有左旋螺纹部分56和右旋螺纹部分58,该左旋螺纹部分56和右旋螺纹部分58各自与布置在相应的滑架22、24上的主轴螺母60相互作用。如果电动机52被启动,并且取决于电动机52的旋转方向,两个滑架22和24由此朝向或远离彼此移动。为了补偿联接装置40的部件之间在y方向上的可能间隙,可以提供弹簧元件62,如图4所示,该弹簧元件推动两个滑架22、24彼此远离。
47.根据另一实施例,联接装置可具有齿条而不是主轴56,该齿条紧固到两个滑架22、24中的至少一个,其中,齿条与用于调节两个滑架22、24之间的距离的调节小齿轮相互作用。还可以想到,联接装置40具有与两个滑架22、24相互作用的用于调节所述滑架的可驱动皮带。联接装置还可以提供实现可能调节的完全不同的驱动装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1