一种悬臂式上下料机器人的制作方法
1.本发明涉及机器人技术系统,具体涉及一种悬臂式上下料机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.工业机器人在工业生产过程中,尤其是装配过程中,将不同的配件组合固定在一个工件上,而对于装配好的工件需要检测各配件之间的固定稳定性,并将不合格产品剔除,而现有技术中,会出现检测的不合格产品因为操作失误将不合格品混入合格品种。因此,研发一种悬臂式上下料机器人是很有必要的。
技术实现要素:
4.本发明的目的是提供一种悬臂式上下料机器人。
5.为了解决上述技术问题,本发明提供了一种悬臂式上下料机器人,包括:底板上料部、触角上料部、压合部、输送板和下料检测部,所述底板上料部固定在工作台上,所述底板上料部适于将底板依次输送至输送板上,所述下料检测部固定在工作台靠近压合部的一侧;所述触角上料部固定在所述工作台远离所述底板上料部的一端,所述触角上料部适于将触角依次放置到底板上;所述压合部固定在所述输送板上方,所述压合部适于将触角压合固定在底板上;所述下料检测部包括:支撑架、驱动电机、检测操作台、夹取组件和下料载板,所述支撑架固定在所述工作台的一侧,所述支撑架沿工作台的长度方向设置;所述驱动电机固定在所述支撑架靠近所述触角上料部的一端,所述夹取组件可滑动的设置在所述支撑架侧壁,且所述夹取组件与所述驱动电机联动;所述检测操作台固定在所述工作台上,所述检测操作台上对称固定有两凸起块,所述检测操作台适于检测触角固定是否合格;所述夹取组件下端开设有与所述凸起块相适配的凹槽;所述下料载板固定在所述检测操作台的一侧,其中底板上料部工作时将底板依次输送至输送板上,所述触角上料部同步工作并将触角依次放置在底板上;压合部能够将触角压合固定在底板上;驱动电机驱动所述夹取组件水平滑动,以使夹取组件夹紧底板并移动至检测操作台以检测触角固定是否合格;检测合格时,夹取组件向下移动以夹取底板,同时夹取组件能够负压抽吸底板外壁的灰尘;
检测不合格时,夹取组件向下移动以使凸起块插入夹取组件下端的凹槽内,驱动夹取组件水平向左滑动,以使夹取组件内侧顶推底板外壁形成一缺陷槽,以标识不合格件。
6.进一步地,所述夹取组件包括:竖直气缸、固定块、负压吸盘、伸缩杆、两滑动板和顶推柱,所述竖直气缸可滑动的设置在所述支撑架侧壁,所述固定块固定在所述竖直气缸的活动端;所述固定块呈矩形,且所述固定块下端向上设置有两限位板,两所述限位板对称设置;所述固定块靠近所述工作台的一侧固定有一定位块,所述伸缩杆可伸缩的设置在所述固定块上,且所述伸缩杆竖直设置;所述负压吸盘固定在所述伸缩杆下端,且所述负压吸盘通过气管与负压气泵连通;两滑动板可滑动的设置在所述固定块下端,且两滑动板分别设置在两限位板之间;所述凹槽分别开设在两滑动板下端;所述顶推柱垂直固定在位于右侧的一个限位板侧壁,且所述滑动板侧壁开设有与所述顶推柱相适配的通孔;其中工作时,竖直气缸驱动所述固定块向下移动,以使底板位于两滑动板之间;继续向下移动固定块以使负压吸盘与底壁上表面相抵,负压吸盘负压吸附底板并将底板搬运至检测操作台上,且底板位于两凸起块之间;检测不合格时,竖直气缸驱动所述固定块向下移动,以使两凸起块分别对应插入两凹槽内,驱动电机驱动所述固定块水平向左滑动,以使顶推柱同步向左滑动并对底板侧壁顶推出一缺陷槽。
7.进一步地,所述定位块上开设有一与气管连通的负压风道,所述负压风道通过单向阀与所述伸缩杆联动;所述固定块上开设有若干抽吸通道,所述抽吸通道上端与所述负压风道连通,所述抽吸通道下端朝向底板;其中检测合格时,竖直气缸驱动所述固定块向下移动,至负压吸盘与底板相抵,继续向下驱动所述固定块,以使伸缩杆向上收缩并打开所述单向阀,所述抽吸通道与负压气泵连通,并负压抽吸底板外壁的灰尘。
8.进一步地,所述固定块下端还固定有两压缩弹簧,所述压缩弹簧一端固定在所述滑动板侧壁,所述压缩弹簧另一端固定在所述限位板侧壁。
9.进一步地,所述检测操作台包括:支撑台、伸缩气缸和检测板,所述支撑台通过立板固定在所述工作台上,且所述支撑台水平设置,所述伸缩气缸固定在所述支撑台远离所述支撑架的一端,所述检测板固定在所述伸缩气缸的活塞杆端部,所述检测板上设置有若干检测点位,且一个检测点位对应底板上的一个触角。
10.进一步地,所述下料载板包括:下料台、引导板和限位块,所述下料台呈矩形,所述下料台上开设有一与底板相适配的容纳槽,所述引导板倾斜固定在所述下料台的一侧,所述引导板下端向下倾斜延伸;所述限位块固定在所述下料台远离所述引导板的一端,且所述限位块与所述凹槽相适配;其中
负压吸盘吸附底板并移动至下料台上后,右侧的滑动板卡插在所述限位块上,固定块向左滑动,以使所述顶推柱推动底板向引导板方向移动;检测合格时,顶推块能够推动底板沿所述引导板下料;检测不合格时,顶推块插入所述缺陷槽内,顶推块无法推动底板下料。
11.进一步地,所述底板上料部包括:第一震动上料盘、第一直震器和第一上料气缸,所述第一震动上料盘固定在所述工作台上,所述第一震动上料盘上端敞口,所述第一震动上料盘适于存放底板;所述第一直震器固定在所述第一震动上料盘的一侧,所述第一直震器一端与第一震动上料盘的出料口连通,所述第一直震器另一端与所述输送板连通;所述第一上料气缸固定在所述输送板的端部;其中工作时,第一震动上料盘将底板依次向第一直震器输送;第一直震器将底板输送向输送板上,所述第一上料气缸活动端推动底板向触角上料部水平移动。
12.进一步地,所述触角上料部包括:第二震动上料盘、第二直震器、滑动支架和夹料机械手,所述第二震动上料盘固定在所述工作台上,所述第二震动上料盘上端敞口;所述第二直震器固定在所述第二震动上料盘的一侧,所述第二直震器一端与所述第二震动上料盘的出料口连通,所述第二直震器另一端与所述输送板侧部相抵;所述滑动支架固定在所述第二直震器一侧,所述夹料机械手可滑动的设置在所述滑动支架侧壁,且所述夹料机械手设置在所述第二直震器上方;其中工作时,夹料机械手夹取触角并水平滑动,以将触角依次插入底板对应的工位上。
13.进一步地,所述夹料机械手包括:夹料气缸、夹料滑板、升降板、接触块、下料气缸和磁吸柱,所述夹料滑板呈矩形,所述夹料滑板可滑动的设置在所述滑动支架侧壁;所述夹料气缸固定在所述夹料滑板上端,所述升降板固定在所述夹料气缸的活塞杆端部;所述下料气缸固定在所述升降板侧壁,所述接触块固定在所述下料气缸下端;所述接触块上开设有一贯通孔,所述贯通孔竖直设置,且所述下料气缸的活塞杆端部可滑动的插入所述贯通孔内;所述磁吸柱固定在所述接触块内,且所述磁吸柱的侧壁与所述贯通孔的内壁共面;其中工作时,所述夹料气缸驱动所述接触块向下滑动,以使触角插入所述贯通孔内;接触块移动至底板上方后,所述下料气缸活塞杆向下移动,以将触角插入底板对应的工位上。
14.进一步地,所述压合部包括:压合气缸、压合固定板、压合支架和压合触板,所述压合支架垂直固定在所述工作台上,所述压合气缸固定在所述压合支架侧壁,所述压合固定板固定在所述压合支架远离所述压合气缸的一侧;所述压合固定板竖直方向开设有一滑动槽,所述压合触板上端可滑动的设置在所述滑动槽内,所述压合触板下端设置在所述压合固定板下方;所述压合固定板沿水平方向开设有一移动槽,所述移动槽与所述滑动槽连通,所述压合气缸的活塞杆设置在所述移动槽内,且所述压合气缸的活塞杆端部与所述压合触板
上端相抵;所述压合触板下端设置有若干压合凸点,一个压合凸点对应一个触角;其中工作时,压合气缸活塞杆沿所述移动槽滑动,以推动所述压合触板向下移动以将触角压合固定在底板上。
15.本发明的有益效果是,本发明提供了一种悬臂式上下料机器人,通过底板上料部的设置,能够将底板依次输送到输送板上。通过触角上料部的设置,能够依次将触角放置到输送板对应的底板上。通过压合部的设置,能够将底板上的触角压合在底板上。通过下料检测部的设置,能够依次将输送至输送板末端的底板夹取并搬运到检测操作台上进行检测,对不合格的底板侧壁挤压出缺陷槽以标识,方便操作人员识别,对合格的底板,继续输送至下料载板进行下料。
附图说明
16.下面结合附图和实施例对本发明进一步说明。
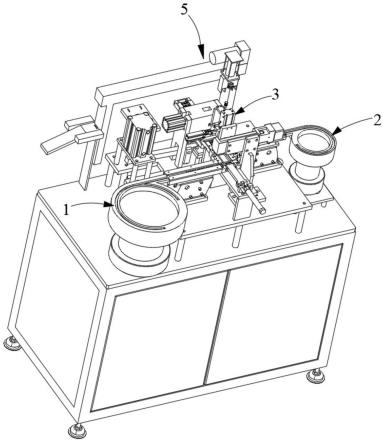
17.图1是本发明的一种悬臂式上下料机器人的优选实施例的立体图;图2是本发明的下料检测部的立体图;图3是本发明的夹取组件的立体图;图4是本发明的固定块内部结构示意图;图5是本发明的下料载板立体图;图6是本发明的底板上料部的立体图;图7是本发明的触角上料部的立体图;图8是本发明的夹料机械手的立体图;图9是本发明的压合部的立体图。
18.图中:1、底板上料部;11、第一震动上料盘;12、第一直震器;13、第一上料气缸;2、触角上料部;21、第二震动上料盘;22、第二直震器;23、滑动支架;24、夹料机械手;241、夹料气缸;242、夹料滑板;243、升降板;244、接触块;245、下料气缸;246、磁吸柱;3、压合部;31、压合气缸;32、压合固定板;33、压合支架;34、压合触板;35、滑动槽;36、移动槽;4、输送板;5、下料检测部;51、支撑架;52、驱动电机;53、检测操作台;531、支撑台;532、伸缩气缸;533、检测板;534、凸起块;54、夹取组件;541、竖直气缸;542、固定块;543、负压吸盘;544、伸缩杆;545、滑动板;546、顶推柱;547、限位板;548、定位块;549、负压风道;5490、抽吸通道;5491、压缩弹簧;55、下料载板;551、下料台;552、引导板;553、限位块。
具体实施方式
19.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
20.如图1至9所示,本发明提供了一种悬臂式上下料机器人,包括:底板上料部1、触角上料部2、压合部3、输送板4和下料检测部5。底板上料部1适于将底板依次输送到输送板4
上。触角上料部2适于将触角依次放置到底板上。压合部3适于将触角压合在底板上。下料检测部5适于检测底板和触角的连接是否合格。针对于上述部件,下面进行一一详述。
21.底板上料部1底板上料部1固定在工作台上,底板上料部1内适于容置若干底板原件,并且底板上料部1工作时,能够将底板依次输送至输送板4上。
22.为了实现上述效果,底板上料部1包括:第一震动上料盘11、第一直震器12和第一上料气缸13。第一震动上料盘11固定在工作台上,第一震动上料盘11上端敞口,第一震动上料盘11适于存放底板。第一震动上料盘11自身能够持续震动,以使存放在其内的底板在第一震动上料盘11内持续翻动,以使底板依次向第一震动上料盘11内的出料口移动。所述第一直震器12固定在所述第一震动上料盘11的一侧,所述第一直震器12一端与第一震动上料盘11的出料口连通,所述第一直震器12另一端与所述输送板4连通。第一直震器12自身也能够产生震动,且第一直震器12远离第一震动上料盘11的一端向下倾斜,以使第一直震器12能够驱动第一震动上料盘11内进入的底板向第一直震器12另一端输送。输送板4与第一直震器12长度方向垂直设置,以使第一直震器12上的底板能够从一侧滑动至输送板4上端,并且输送板4同一时间内仅能够容纳一个底板进入。第一上料气缸13固定在输送板4靠近第一直震器12的一端端部,第一上料气缸13的活塞杆与输送板4的长度方向平行。第一上料气缸13工作时,能够推动位于输送板4上端的底板向触角上料部2一侧水平移动移动。
23.触角上料部2触角上料部2固定在所述工作台远离所述底板上料部1的一端,所述触角上料部2适于将触角依次放置到底板上,即第一上料气缸13将底板顶推至触角上料部2一侧时,触角上料部2将触角放置到底板上。
24.下面具体说明触角上料部2的结构,所述触角上料部2包括:第二震动上料盘21、第二直震器22、滑动支架23和夹料机械手24。所述第二震动上料盘21固定在所述工作台上,所述第二震动上料盘21上端敞口,第二震动上料盘21内适于放置触角。第二震动上料盘21自身能够持续震动,以使存放在其内的触角在第一震动上料盘11内持续于翻动,以使触角依次向第二震动上料盘21内的出料口移动。所述第二直震器22固定在所述第二震动上料盘21的一侧,所述第二直震器22一端与所述第二震动上料盘21的出料口连通。第二直震器22自身也能够产生震动,且第二直震器22远离第二震动上料盘21的一端向下倾斜,以使第二直震器22能够驱动第二震动上料盘21内进入的触角向第二直震器22另一端输送,即第二直震器22的下料端。所述第二直震器22下料端与所述输送板4侧部相抵,第一上料气缸13能够顶推底板沿输送板4滑动至触角上料部2第二直震器22的下料端。所述滑动支架23固定在所述第二直震器22一侧,滑动支架23适于支撑夹料机械手24。所述夹料机械手24可滑动的设置在所述滑动支架23侧壁,且所述夹料机械手24设置在所述第二直震器22上方。滑动支架23适于驱动夹料机械手24水平滑动,夹料机械手24适于沿滑动支架23竖直滑动,且夹料机械手24适于夹取触角。触角上料部2工作时,将夹料机械手24夹取触角并水平滑动,以将触角依次插入底板对应的工位上。
25.为了实现上述效果,所述夹料机械手24包括:夹料气缸241、夹料滑板242、升降板243、接触块244、下料气缸245和磁吸柱246。所述夹料滑板242呈矩形,所述夹料滑板242可滑动的设置在所述滑动支架23侧壁,夹料滑板242适于支撑夹料气缸241。所述夹料气缸241
固定在所述夹料滑板242上端,夹料气缸241的活塞杆竖直朝下设置。所述升降板243固定在所述夹料气缸241的活塞杆端部。夹料升降板243工作时,能够通过活塞杆驱动升降板243上下滑动。所述下料气缸245固定在所述升降板243侧壁,下料气缸245的活塞杆与夹料气缸241的活塞杆平行设置。所述接触块244固定在所述下料气缸245下端,所述接触块244上开设有一贯通孔,所述贯通孔竖直设置,且所述下料气缸245的活塞杆端部可滑动的插入所述贯通孔内。贯通孔与触角适配,即夹料气缸241能够驱动接触块244向下滑动至触角插入贯通孔内。所述磁吸柱246固定在所述接触块244内,且所述磁吸柱246的侧壁与贯通孔的内壁共面,磁吸柱246具有磁性,以吸引触角,触角插入贯通孔后,磁吸柱246能够吸引触角,以使触角定位在贯通孔内。通过上述方式,使得夹料机械手24工作时,所述夹料气缸241驱动所述接触块244向下滑动,以使触角插入所述贯通孔内。接触块244移动至底板上方后,所述下料气缸245活塞杆向下移动,顶推触角克服磁吸柱246的磁力,直至触角与磁吸柱246脱离,以将触角插入底板对应的工位上。
26.压合部3压合部3固定在所述输送板4上方,压合部3位于输送板4触角上料部2的下游,具体来说,触角安装到底板上后,第一上料气缸13继续推动底板沿输送板4移动至压合部3正下方,所述压合部3适于将触角压合固定在底板上。
27.下面具体说明压合部3的结构,所述压合部3包括:压合气缸31、压合固定板32、压合支架33和压合触板34。所述压合支架33垂直固定在所述工作台上,压合支架33适于支撑压合气缸31。所述压合气缸31固定在所述压合支架33侧壁,压合气缸31的活塞杆水平朝向输送板4,压合气缸31的活塞杆与输送板4的长度方向垂直。所述压合固定板32固定在所述压合支架33远离所述压合气缸31的一侧,压合固定板32内适于容纳压合气缸31的活塞杆和压合触板34,并且压合气缸31的活塞杆和压合触板34均能够在压合固定板32内滑动。具体来说,所述压合固定板32竖直方向开设有一滑动槽35,所述压合触板34上端可滑动的设置在所述滑动槽35内,所述压合触板34下端设置在所述压合固定板32下方;所述压合固定板32沿水平方向开设有一移动槽36,所述移动槽36与所述滑动槽35连通,所述压合气缸31的活塞杆设置在所述移动槽36内,且所述压合气缸31的活塞杆端部与所述压合触板34上端相抵,压合气缸31的活塞杆端部朝下设置有斜面,压合触板34朝向压合气缸31的活塞杆的一侧与斜面适配。通过上述设置,使得压合气缸31启动时,压合气缸31的活塞杆沿移动槽36滑动至与压合触板34相抵,压合气缸31推动压合触板34向下滑动,以使压合触板34下端与触角相抵。所述压合触板34下端设置有若干压合凸点,一个压合凸点对应一个触角,压合凸点与触角相抵时,能够将触角压合在底板上。此外,压合固定板32内还固定有一拉簧,拉簧一端固定在移动槽36侧壁,另一端固定在压合触板34的上端。压合气缸31的活塞杆与压合触板34脱离后,拉簧能够拉动压合触板34向上回缩,以使输送板4上的下一个底板能够移动至压合触板34正下方。
28.下料检测部5下料检测部5固定在工作台靠近压合部3的一侧,具体地,下料检测部5位于输送板4远离第一上料气缸13的一端,第一上料气缸13顶推底板移动至输送板4的末端时,底板移动至下料检测部5的下方。下料检测部5能够将底板夹取并检测底板的触角安装是否合格,并对合格的底板进行下料。
29.下面具体说明驱动电机52的结构,所述下料检测部5包括:支撑架51、驱动电机52、检测操作台53、夹取组件54和下料载板55。所述支撑架51固定在所述工作台的一侧,所述支撑架51沿工作台的长度方向设置,即支撑架51的长度方向与输送板4的输送方向垂直。所述驱动电机52固定在所述支撑架51靠近所述触角上料部2的一端,所述夹取组件54可滑动的设置在所述支撑架51侧壁,夹取组件54适于夹取底板,且所述夹取组件54与所述驱动电机52联动,驱动电机52启动时,能够驱动夹取组件54沿支撑架51侧壁水平滑动。所述检测操作台53固定在所述工作台上,检测操作台53适于检测底座上的触角安装是否合格。所述下料载板55固定在所述检测操作台53的一侧。通过上述设置,使得底板移动至输送板4末端后,夹取组件54将底板吸附,驱动电机52驱动所述夹取组件54水平滑动,以使夹取组件54夹紧底板并移动至检测操作台53以检测触角固定是否合格。检测合格时,夹取组件54向下移动以吸附底板,同时夹取组件54能够负压抽吸底板外壁的灰尘;检测不合格时,夹取组件54能够从一侧顶推并挤压底板侧壁,以使底板外壁形成一缺陷槽,以标识不合格件,操作人员能够通过缺陷槽判断底板是否合格,从而将不合格的底板从检测操作台53上取下。
30.为了实现上述夹取组件54夹取底板,并挤压不合格底板的效果,所述夹取组件54包括:竖直气缸541、固定块542、负压吸盘543、伸缩杆544、两滑动板545和顶推柱546。所述竖直气缸541可滑动的设置在所述支撑架51侧壁,竖直气缸541的活塞杆竖直朝下设置,所述固定块542固定在所述竖直气缸541的活动端,所述固定块542呈矩形。所述固定块542靠近所述工作台的一侧固定有一定位块548,定位块548适于承载并定位伸缩杆544。所述伸缩杆544可伸缩的设置在所述固定块542上,且所述伸缩杆544竖直设置,所述负压吸盘543固定在所述伸缩杆544下端,且所述负压吸盘543通过气管与负压气泵连通。竖直气缸541驱动固定块542向下移动至负压吸盘543与底板上表面相抵时,负压气泵启动,将负压吸盘543与底板之间的空气吸走,以使底板吸附在负压吸盘543上,以转移底板。所述固定块542下端向上设置有两限位板547,两所述限位板547对称设置,两滑动板545可滑动的设置在所述固定块542下端,且两滑动板545分别设置在两限位板547之间。两滑动板545处于初始位置时,两滑动板545之间的距离与底板的长度相同,负压吸盘543吸取底板时,两滑动板545分别与底板的两侧贴合。所述顶推柱546垂直固定在位于右侧的一个限位板547侧壁,且所述滑动板545侧壁开设有与所述顶推柱546相适配的通孔,与顶推柱546连接的滑动板545向对应限位板547靠近时,顶推柱546能够穿过通孔凸出滑动板545内侧壁。通过上述设置,能够实现夹取组件54夹取底座的效果。此外,两滑动板545下端分别开设有凹槽,所述检测操作台53上对称固定有两凸起块534,凹槽与凸起块534对应,竖直气缸541能够驱动滑动板545的凹槽对应插入凸起块534内。通过上述设置,使得滑动板545的凹槽能够对应插入凸起块534内,以使滑动板545被限位,底座夹在两滑动板545之间,若检测操作台53检测出底座不合格,驱动电机52驱动固定块542水平向左滑动,以使与顶推柱546连接的滑动板545相对靠近限位板547,顶推柱546插入底座内,从而形成一缺陷槽。
31.根据上述设置,夹取组件54的工作过程为:底座移动至夹取组件54下方时,竖直气缸541驱动夹取组件54向下移动,以使底板位于两滑动板545之间,继续向下移动固定块542以使负压吸盘543与底壁上表面相抵,负压吸盘543负压吸附底板并将底板搬运至检测操作台53上,且底板位于两凸起块534之间。底座检测不合格时,竖直气缸541驱动所述固定块542向下移动,以使两凸起块534分别对应插入两凹槽内,驱动电机52驱动所述固定块542水
平向左滑动,以使顶推柱546同步向左滑动并对底板侧壁顶推出一缺陷槽,接着,驱动电机52驱动固定块542水平向右滑动,以使顶推柱546与底座脱离,操作人员能够将检测操作台53上的不合格底座取下。
32.为了便于滑动板545复位,所述固定块542下端还固定有两压缩弹簧5491,所述压缩弹簧5491一端固定在所述滑动板545侧壁,所述压缩弹簧5491另一端固定在所述限位板547侧壁。驱动电机52驱动顶推柱546与底座脱离后,压缩弹簧5491能够顶推滑动板545复位,以使顶推柱546缩回滑动板545内。
33.下面具体说明检测操作台53的结构,所述检测操作台53包括:支撑台531、伸缩气缸532和检测板533,所述支撑台531通过立板固定在所述工作台上,且所述支撑台531水平设置,支撑台531适于支撑伸缩气缸532和检测板533。所述伸缩气缸532固定在所述支撑台531远离所述支撑架51的一端,伸缩气缸532的活塞杆水平朝向支撑架51,所述检测板533固定在所述伸缩气缸532的活塞杆端部,所述检测板533上设置有若干检测点位,且一个检测点位对应底板上的一个触角。
34.为了在搬运底座的过程中,对底座表面吸气除尘,所述定位块548上开设有一与气管连通的负压风道549,所述负压风道549通过单向阀与所述伸缩杆544联动。具体来说,负压吸盘543在吸取底板时,底板推动伸缩杆544向上滑动,以使伸缩杆544滑动至负压风道549与器官连通。所述固定块542上开设有若干抽吸通道5490,所述抽吸通道5490上端与所述负压风道549连通,所述抽吸通道5490下端朝向底板。通过上述设置,使得检测合格时,竖直气缸541驱动所述固定块542向下移动,至负压吸盘543与底板相抵,继续向下驱动所述固定块542,底板推动伸缩杆544向上滑动,以使伸缩杆544向上收缩并打开所述单向阀,所述抽吸通道5490与负压气泵连通,并负压抽吸底板外壁的灰尘。
35.底板经过上述检测过程后,不合格底板通过操作人员取走,合格底板能够通过负压吸盘543吸附,并搬运到下料载板55上,在通过下料载板55下料,同时下料载板55能够再次检测底板是否合格,以避免不合格的底板未及时取走时,混入合格底板内。
36.为了实现上述效果,所述下料载板55包括:下料台551、引导板552和限位块553。所述下料台551固定在支撑架51一侧,且下料台551设置在支撑架51远离驱动电机52的一端。下料台551呈矩形,下料台551适于承载引导板552和限位块553,所述下料台551上开设有一与底板相适配的容纳槽。所述引导板552倾斜固定在所述下料台551的一侧,所述引导板552下端向下倾斜延伸。所述限位块553固定在所述下料台551远离所述引导板552的一端,且所述限位块553与所述凹槽相适配。通过上述设置,负压吸盘543吸附底板并移动至下料台551上后,右侧的滑动板545卡插在所述限位块553上,驱动电机52驱动固定块542向左滑动,以使所述顶推柱546推动底板向引导板552方向移动。若底板检测合格,顶推块能够推动底板向左滑动至引导板552上,底座能够顺引导板552下滑,实现下料;若底板检测不合格,则固定块542向左滑动时,顶推块插入缺陷槽内,以使顶推块不会顶推底板向左滑动,即底板无法滑动至引导板552上,因而不会下落,从而提醒操作人员及时将不合格底板取走。
37.以上依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1