一种金属极薄带单机架两连轧机的轧制方法与流程
1.本技术涉及精密金属极薄带生产领域,特别涉及一种金属极薄带单机架两连轧机的轧制方法。
背景技术:
2.近年来,随着微制造行业的兴起,市场对微材料的需求快速增加。金属极薄带即带状的金属及合金箔材作为微材料的一种广泛应用于微电子、航空航天、锂离子电池和机器人等行业。传统的金属极薄带生产方法多为单机架轧机(多辊轧机)多道次可逆轧制生产,由于金属极薄带轧制困难,存在道次压下率小的特点,导致单机架轧机生产金属极薄带时的轧制道次过多,生产效率低下,成本较高。为提高生产效率,人们曾寻求多机架连轧方案,拟采用5套森吉米尔轧机纵向排列以连续轧制生产金属极薄带,后由于该方案成本过高、技术难度过大而没有实施。为兼顾效率和成本,人们还探究了单机架连轧的可行性,造出了样机并进行了实验,发现单机架连轧的确可以大大提高生产效率且设备成本较低,但却存在连轧辊缝处流量不匹配问题,即所有辊缝的流量并非完全相等,极易导致不匹配辊缝间的轧件不断累积或减少,给张力控制造成困难,无法长时间稳定轧制。
技术实现要素:
3.本发明的目的在于提供一种金属极薄带单机架两连轧机的轧制方法,可解决单机架两连轧时因两处辊缝流量不匹配导致的两辊缝间轧件不断积累或减少的问题,实现长时间稳定轧制。
4.为实现上述目的,本发明提供如下技术方案。
5.本技术实施例公开了一种金属极薄带单机架两连轧机的轧制方法,通过轧机机械装置和轧机控制系统完成,
6.所述轧机机械装置包括沿轧件轧制方向依次设置的卷筒一、转向辊一、测厚仪一、牌坊、转向辊四、活套装置、转向辊三、测厚仪三、所述牌坊、测厚仪二、转向辊二、卷筒二,所述卷筒一与所述卷筒二位于所述牌坊的同一侧,
7.所述牌坊内由上至下依次装配有上支撑辊、上工作辊、浮动工作辊、下工作辊以及下支撑辊,所述上工作辊与所述浮动工作辊之间轧制所述轧件,所述浮动工作辊与所述下工作辊之间轧制所述轧件,
8.所述牌坊上安装有压下装置,所述压下装置作用于所述上支撑辊,继而依次带动所述上工作辊、所述浮动工作辊,并控制所述轧件位于所述上工作辊与所述浮动工作辊之间以及位于所述浮动工作辊与所述下工作辊之间的压下轧制力,
9.还包括可逆且单独控制的主电机一、主电机二、卷取电机一、卷取电机二,所述主电机一依次经过主减速机一、主减速机三减速后通过联轴器一驱动所述上工作辊,所述主电机二依次经过主减速机二、所述主减速机三减速后,通过联轴器二驱动所述下工作辊,所述卷取电机一驱动所述卷筒一,所述卷取电机二驱动所述卷筒二,
10.所述活套装置包括活套滑轨、卷取电机三、卷取减速机三、卷筒三、相对设置且之间形成一定间距的活套架一与活套架二,所述套架一与所述活套滑轨固定安装,所述活套架二沿所述轧件轧制方向水平往复移动安装于所述活套滑轨,所述活套架一与活套架二分别沿竖直方向设置有多个活套辊,所述轧件交错穿过所述活套架一与活套架二上的所述活套辊,所述卷筒三缠绕活套张力引带的一端,所述活套张力引带的另一端固定于所述活套架二的底部,所述卷取电机三为可逆电机,所述卷取电机三通过所述卷取减速机三驱动所述卷筒三,继而控制所述活套架二的水平移动,
11.所述轧机控制系统包括测量传感器、工控机、plc、操作台、控制柜和变频器,所述测量传感器包括测量所述压下装置压下轧制力的测轧制力用力传感器、测量所述轧件张力的测张力用力传感器一与测张力用力传感器二与测张力用力传感器三、分别测量并控制所述主电机一与所述主电机二转速的测主电机转速用编码器一与测主电机转速用编码器二、分别测量并控制所述卷取电机一与所述卷取电机二与所述卷取电机三转速的测卷取电机转速用编码器一与测卷取电机转速用编码器二与测卷取电机转速用编码器三、测量所述轧件速度的测轧速编码器一与测轧速编码器二与测轧速编码器三与测轧速编码器四,所述测轧速编码器一、测轧速编码器二、测轧速编码器三与测轧速编码器四分别安装于所述转向辊一、转向辊二、转向辊三与转向辊四的一侧,所述测张力用力传感器一、测张力用力传感器二、测张力用力传感器三分别位于所述转向辊一、转向辊二、转向辊三的下方,所述测厚仪一、所述测厚仪二与所述测厚仪三分别测量所述轧件的厚度,还包括分别安装于所述活套滑轨两端的接近开关一与接近开关二,
12.轧制方法依次包括如下步骤:
13.s1设定基础轧制参数,包括最大活套累积速差许用值δv
max
、最大活套累积长度许用值l
max
、初始轧制力p及各轧制道次轧件出口厚度h,卷筒一张力f1、卷筒二张力f2和活套张力f
p
;
14.s2穿带,将轧件一端缠绕在卷筒二上,将轧件另一端依次穿过转向辊二、测厚仪二、下辊缝、测厚仪三、转向辊三、活套装置、转向辊四、上辊缝、测厚仪一、转向辊一,最后缠绕在卷筒一上,在活套装置内穿带时,将活套架二移动至接近开关一与接近开关二中间的位置,轧件交替穿过活套架一与活套架二上的活套辊;
15.s3压下和建张,参考测轧制力用力传感器实时测量的轧制力数值,按下辊缝压下按钮增大轧制力至初始设定值p,参考3个测张力用力传感器实时测量的上下辊缝处左右轧件的张力值,旋转3个张力调节双向自复位开关增大卷筒一张力、卷筒二张力和活套张力至其各自设定值f1、f2和f
p
;
16.s4按下活套累积长度清零按钮,活套累积长度l示数变为0;
17.s5启动轧机,按下加速按钮,主电机一和主电机二的转速等比例增大,加速按钮和减速按钮分别控制两台主电机转速的增加和减小且两者转速比例保持不变,初始加速时两台主电机转速相同,上、下工作辊的线速度相同;
18.s6调节辊缝压下按钮和辊缝抬起按钮,使单机架两道次轧制后轧件出口厚度值达到其设定值h;
19.s7实时测量计算活套累积速差δv,活套累积速差δv由公式δv=|v
3-v4|实时计算得出,式中下辊缝左侧轧件速度v3由测轧速编码器三测量计算得到,上辊缝左侧轧件速
度v4由测轧速编码器四测量计算得到;
20.s8实时比较活套累积速差δv和最大活套累积速差许用值δv
max
,调节快速辊主电机的转速,以上辊缝处轧件运动方向为基准,右向轧制时,上工作辊为快速辊,主电机一为快速辊主电机,主电机二为慢速辊主电机;左向轧制时,下工作辊为快速辊,主电机二为快速辊主电机,主电机一为慢速辊主电机;
21.右向轧制时,如δv>∧v
max
且v3>v4,则增大主电机一转速;如δv>∧v
max
且v3<v4,则减小主电机一转速,
22.左向轧制时,如δv>δv
max
且v3>v4则减小主电机二转速;如δv>δv
max
且v3<v4,则增大主电机二转速,
23.当δv≤δv
max
时,不调节快速辊主电机转速;
24.s9实时计算活套累积长度l,右向轧制时,活套累积长度l由公式l=∫(v
3-v4)dt实时计算得出,式中t为累积时间;左向轧制时,活套累积长度l的计算公式为l=∫(v
4-vd)dt,活套累积长度l在数值上可正可负,当l>0时,表明活套架二左移,靠近接近开关二;当l<0时,表明活套架二右移,靠近接近开关一;
25.s10实时比较套累积长度l和最大活套累积长度许用值l
max
,调节快速辊主电机的转速,
26.右向轧制时,如|l|>l
max
且l>0,则增大主电机一转速直至v3<v4;如|l|>l
max
且l<0,则减小主电机一转速直至v3>v4,
27.左向轧制时,如|l|>l
max
且l>0,则增大主电机二转速直至v3>v4;如|l|>l
max
且l<0,则减小主电机二转速直至v3<v4,
28.当|l|≤l
max
时,不调节快速辊主电机转速;
29.s11实时监测接近开关一和接近开关二的信号变化,调节慢速辊主电机的转速,
30.右向轧制时,如活套架二向左运动至接近开关二感应区,接近开关二信号置1,活套远端指示灯亮起,则减小主电机二转速直至v3<v4;如活套架二向右运动至接近开关一感应区,接近开关一信号置1,活套近端指示灯亮起,则增大主电机二转速直至v3>v4,
31.左向轧制时,如活套架二向左运动至接近开关二感应区,接近开关二信号置1,活套远端指示灯亮起,则减小主电机一转速直至v3>v4;如活套架二向右运动至接近开关一感应区,接近开关一信号置1,活套近端指示灯亮起,则增大主电机一转速直至v3<v4,
32.当活套架二在接近开关一和接近开关二感应区之间运动时,不调节慢速辊主电机转速;
33.s12重复步骤s6至步骤s11,直至轧件减薄至目标厚度。
34.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述卷取电机一的动力输出轴连接卷取减速机一的动力输入轴,所述卷取减速机一的动力输出轴驱动所述卷筒一,所述卷取电机二的动力输出轴连接卷取减速机二的动力输入轴,所述卷取减速机二的动力输出轴驱动所述卷筒二。
35.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述转向辊一的顶点、所述浮动工作辊的顶点以及所述转向辊四的底点位于同一水平线,所述转向辊二的顶点、所述转向辊三的顶点以及所述浮动工作辊的底点位于同一水平线。
36.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述转向辊一、转向
辊二、转向辊三、转向辊四均为空心辊且均为被动辊,均由所述轧件施加的摩擦力拖动。
37.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述压下装置包括压下电机和压下蜗轮蜗杆减速机,所述压下蜗轮蜗杆减速机的蜗杆即为压下丝杠,所述压下电机驱动所述压下蜗轮蜗杆减速机,控制所述压下丝杠的上下,进而控制压下轧制力的大小,所述测轧制力用力传感器位于所述压下丝杠的下方。
38.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述测主电机转速用编码器一与所述测主电机转速用编码器二分别位于所述主电机一与所述主电机二的转子轴上,所述测卷取电机转速用编码器一、所述测卷取电机转速用编码器二与所述测卷取电机转速用编码器三分别位于所述卷取电机一、所述卷取电机二与所述卷取电机三的转子轴上。
39.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述工控机配有wincc组态的控制系统人机界面,在人机界面上有最大活套累积速差许用值δv
max
输入域、最大活套累积长度许用值l
max
输入域、初始轧制力p输入域、pid参数输入域、各轧制道次轧件出口厚度h输出域、卷筒一张力f1输入域、卷筒二张力f2输入域和活套张力f
p
输入域、上辊缝左侧轧件速度v4输出域、下辊缝左侧轧件速度v3输出域、活套累积速差δv输出域、活套累积长度l输出域、上辊缝右侧轧件厚度h1输出域、下辊缝右侧轧件厚度h2输出域和下辊缝左侧轧件厚度h3输出域。
40.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述操作台上有活套累积长度清零按钮、轧制方向调节双向开关、卷筒一张力调节双向自复位开关、卷筒二张力调节双向自复位开关、活套张力调节双向自复位开关、辊缝压下按钮、辊缝抬起按钮、加速按钮、减速按钮、活套远端指示灯和活套近端指示灯。
41.优选地,在上述的金属极薄带单机架两连轧机的轧制方法中,所述变频器位于所述控制柜内,由整流单元、直流母排和5个独立的逆变器组成,分别驱动主电机一、主电机二、卷取电机一、卷取电机二、卷取电机三。
42.与现有技术相比,本发明的优点在于采用5辊纵向配置实现单机架两连轧,引入活套装置并以轧件进出活套装置的速差、活套累积长度和移动活套架的位置为控制信号,控制快慢速工作辊线速度,以匹配上下辊缝处轧件的流量,防止两辊缝间轧件不断累积或减少,实现稳定轧制。本发明可逆单机架轧机的轧制道次更少、生产效率更高、产品成本更低,较多机架连轧机的设备成本更低、技术难度更小。
附图说明
43.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
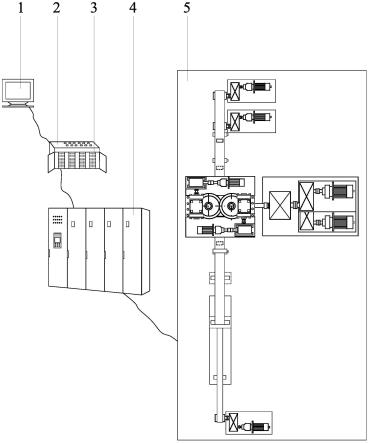
44.图1所示为本发明具体实施例中轧机机械装置的示意图;
45.图2所示为本发明具体实施例中轧机机械装置的主视图;
46.图3所示为本发明具体实施例中轧机机械装置的俯视图;
47.图4所示为本发明具体实施例中压下装置的示意图。
48.图中:。1、工控机;2、操作台;3、plc;4、控制柜;5、轧机机械装置;6、卷筒一;7、卷筒二;8、测张力用力传感器一;9、转向辊一;10、测厚仪一;11、测张力用力传感器二;12、转向辊二;13、测厚仪二;14、下支撑辊;15、下工作辊;16、浮动工作辊;17、上支撑辊;18、上工作辊;19、测厚仪三;20、转向辊四;21、转向辊三;22、测张力用力传感器三;23、活套架一;24、轧件;25、接近开关一;26、活套架二;27、活套辊;28、活套滑轨;29、接近开关二;30、转向辊五;31、活套张力引带;32、卷筒三;33、卷取减速机一;34、卷取电机一;35、测卷取电机转速用编码器一;36、卷取减速机二;37、卷取电机二;38、测卷取电机转速用编码器二;39、测轧速编码器一;40、测轧速编码器二;41、主减速机三;42、主减速机一;43、主电机一;44、测主电机转速用编码器一;45、主减速机二;46、测主电机转速用编码器二;47、主电机二;48、测轧速编码器四;49、测轧速编码器三;50、卷取减速机三;51、卷取电机三;52、测卷取电机转速用编码器三;53、测轧制力用力传感器;54、压下装置;55、压下电机;56、压下蜗轮蜗杆减速机;57、压下丝杠;58、联轴器一;59、联轴器二。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行详细的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
51.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
52.结合图1-4所示,金属极薄带单机架两连轧机的轧制方法,通过轧机机械装置5和轧机控制系统完成,
53.轧机机械装置5包括沿轧件24轧制方向依次设置的卷筒一6、转向辊一9、测厚仪一10、牌坊、转向辊四20、活套装置、转向辊三21、测厚仪三19、牌坊、测厚仪二13、转向辊二12、卷筒二7,卷筒一6与卷筒二7位于牌坊的同一侧,
54.牌坊内由上至下依次装配有上支撑辊17、上工作辊18、浮动工作辊16、下工作辊15以及下支撑辊14,上工作辊18与浮动工作辊16之间轧制轧件24,浮动工作辊16与下工作辊15之间轧制轧件24,
55.牌坊上安装有压下装置54,压下装置54作用于上支撑辊17,继而依次带动上工作辊18、浮动工作辊16,并控制轧件24位于上工作辊18与浮动工作辊16之间以及位于浮动工作辊16与下工作辊15之间的压下轧制力,
56.还包括可逆且单独控制的主电机一43、主电机二47、卷取电机一34、卷取电机二37,主电机一43依次经过主减速机一42、主减速机三41减速后通过联轴器一58驱动上工作辊18,主电机二47依次经过主减速机二45、主减速机三41减速后,通过联轴器二59驱动下工作辊15,卷取电机一34驱动卷筒一6,卷取电机二37驱动卷筒二7,
57.活套装置包括活套滑轨28、卷取电机三51、卷取减速机三50、卷筒三32、相对设置且之间形成一定间距的活套架一23与活套架二26,套架一与活套滑轨28固定安装,活套架二26沿轧件24轧制方向水平往复移动安装于活套滑轨28,活套架一23与活套架二26分别沿竖直方向设置有多个活套辊27,轧件24交错穿过活套架一23与活套架二26上的活套辊27,卷筒三32缠绕活套张力引带31的一端,活套张力引带31的另一端固定于活套架二26的底部,活套张力引带31底部设置有转向辊五30,卷取电机三51为可逆电机,卷取电机三51通过卷取减速机三50驱动卷筒三32,继而控制活套架二26的水平移动,
58.轧机控制系统包括测量传感器、工控机1、plc3、操作台2、控制柜4和变频器,测量传感器包括测量压下装置54压下轧制力的测轧制力用力传感器53、测量轧件24张力的测张力用力传感器一8与测张力用力传感器二11与测张力用力传感器三22、分别测量并控制主电机一43与主电机二47转速的测主电机转速用编码器一44与测主电机转速用编码器二46、分别测量并控制卷取电机一34与卷取电机二37与卷取电机三51转速的测卷取电机转速用编码器一35与测卷取电机转速用编码器二38与测卷取电机转速用编码器三52、测量轧件24速度的测轧速编码器一39与测轧速编码器二40与测轧速编码器三49与测轧速编码器四48,测轧速编码器一39、测轧速编码器二40、测轧速编码器三49与测轧速编码器四48分别安装于转向辊一9、转向辊二12、转向辊三21与转向辊四20的一侧,测张力用力传感器一8、测张力用力传感器二11、测张力用力传感器三22分别位于转向辊一9、转向辊二12、转向辊三21的下方,测厚仪一10、测厚仪二13与测厚仪三19分别测量轧件24的厚度,还包括分别安装于活套滑轨28两端的接近开关一25与接近开关二29,卷取电机一34的动力输出轴连接卷取减速机一33的动力输入轴,卷取减速机一33的动力输出轴驱动卷筒一6,卷取电机二37的动力输出轴连接卷取减速机二36的动力输入轴,卷取减速机二36的动力输出轴驱动卷筒二7。转向辊一9的顶点、浮动工作辊16的顶点以及转向辊四20的底点位于同一水平线,转向辊二12的顶点、转向辊三21的顶点以及浮动工作辊16的底点位于同一水平线。转向辊一9、转向辊二12、转向辊三21、转向辊四20均为空心辊且均为被动辊,均由轧件24施加的摩擦力拖动。
59.压下装置54包括压下电机55和压下蜗轮蜗杆减速机56,压下蜗轮蜗杆减速机56的蜗杆即为压下丝杠57,压下电机55驱动压下蜗轮蜗杆减速机56,控制压下丝杠57的上下,进而控制压下轧制力的大小,测轧制力用力传感器53位于压下丝杠57的下方。
60.测主电机转速用编码器一44与测主电机转速用编码器二46分别位于主电机一43与主电机二47的转子轴上,测卷取电机转速用编码器一35、测卷取电机转速用编码器二38与测卷取电机转速用编码器三52分别位于卷取电机一34、卷取电机二37与卷取电机三51的转子轴上。
61.操作台2上有活套累积长度清零按钮、轧制方向调节双向开关、卷筒一6张力调节双向自复位开关、卷筒二7张力调节双向自复位开关、活套张力调节双向自复位开关、辊缝压下按钮、辊缝抬起按钮、加速按钮、减速按钮、活套远端指示灯和活套近端指示灯。
62.变频器位于控制柜4内,由整流单元、直流母排和5个独立的逆变器组成,分别驱动
主电机一43、主电机二47、卷取电机一34、卷取电机二37、卷取电机三51。
63.工控机配有wincc组态的控制系统人机界面,在人机界面上有最大活套累积速差许用值δv
max
输入域、最大活套累积长度许用值l
max
输入域、初始轧制力p输入域、pid参数输入域、各轧制道次轧件出口厚度h输出域、卷筒一张力f1输入域、卷筒二张力f2输入域和活套张力f
p
输入域、上辊缝左侧轧件速度v4输出域、下辊缝左侧轧件速度v3输出域、活套累积速差δv输出域、活套累积长度l输出域、上辊缝右侧轧件厚度h1输出域、下辊缝右侧轧件厚度h2输出域和下辊缝左侧轧件厚度h3输出域。
64.当轧件选用430不锈钢,初始厚度为100μm,宽度为100.0mm,目标厚度为40μm时。具体实施步骤如下:
65.步骤一:设定如下基础轧制参数,最大活套累积速差许用值δv
max
=1.0m/min、最大活套累积长度许用值l
max
=10m、初始轧制力p=40t和两道次的轧件出口厚度h=60μm、40μm及3个张力值;
66.步骤二:穿带。先将活套架二移动至接近开关一和接近开关二中间位置,然后将430不锈钢带的一端缠绕在卷筒二上,将轧件另一端依次穿过转向辊二、测厚仪二、下辊缝、测厚仪三、转向辊三、活套、转向辊四、上辊缝、测厚仪一和转向辊一,最后缠绕在卷筒一上;
67.步骤三:压下和建张。参考测轧制力用力传感器实时测量的轧制力数值,按下辊缝压下按钮增大轧制力至初始设定值p=40t。参考3个测张力用力传感器的实时测量值,旋转3个张力调节双向自复位开关增大3个张力至其设定值;
68.步骤四:按下活套累积长度清零按钮,此时活套累积长度l=0;
69.步骤五:扳动轧制方向调节双向开关至右向轧制,启动轧机,按下加速按钮,主电机一和主电机二的转速等比例增大,此时主电机一是快速辊电机,主电机二是慢速辊电机;
70.步骤六:调节辊缝压下按钮和辊缝抬起按钮,使单机架两道次轧制后轧件出口厚度值达到其设定值h=60μm;
71.步骤七:测轧速编码器三实时测量下辊缝左侧轧件速度v3,测轧速编码器四实时测量上辊缝左侧轧件速度v4,由公式δv=|v
3-v4|实时计算得出活套累积速差δv;
72.步骤八:实时比较活套累积速差δv和最大活套累积速差许用值δv
max
=1.0m/min,调节快速辊主电机的转速。当δv>1.0m/min且v3>v4,则增大主电机一转速;如∧v>1.0m/min且v3<v4,则减小主电机一转速,使活套累积速差δv始终小于等于其最大许用值,即δv≤1.0m/min;
73.步骤九:测轧速编码器三实时测量下辊缝左侧轧件速度v3,测轧速编码器四实时测量上辊缝左侧轧件速度v4,由公式l=∫(v
3-v4)dt实时计算活套累积长度l;
74.步骤十:实时比较套累积长度l和最大活套累积长度许用值l
max
=10m,调节快速辊主电机的转速。当|l|>10m且l>0,则增大主电机一转速直至v3<v4;当|l|>10m且l<0,则减小主电机一转速直至v3>v4,使活套累积长度l始终小于等于其最大许用值,即l≤10m;
75.步骤十一:实时监测活套架二位置及两个接近开关的信号变化,调节慢速辊主电机的转速。当接近开关二信号置1,则减小主电机二转速直至v3<v4;当接近开关一信号置1,则增大主电机二转速直至v3>v4,使得活套架二始终在接近开关一和接近开关二感应区之间运动;
76.步骤十二:扳动轧制方向调节双向开关至左向轧制,按下加速按钮,调节辊缝压下
按钮和辊缝抬起按钮,使单机架两道次轧制后轧件出口厚度值达到其设定值h=40μm,轧制过程中,轧机采用如下操作:
77.1)测轧速编码器三实时测量下辊缝左侧轧件速度v3,测轧速编码器四实时测量上辊缝左侧轧件速度v4,由公式δv=|v
3-v4|实时计算得出活套累积速差δv;
78.2)实时比较活套累积速差δv和最大活套累积速差许用值δv
max
=1.0m/min,调节快速辊主电机的转速。当δv>1.0m/min且v3>v4,则减小主电机二转速;如δv>1.0m/min且v3<v4,则增大主电机二转速,使活套累积速差δv始终小于等于其最大许用值,即δv≤1.0m/min;
79.3)测轧速编码器三实时测量下辊缝左侧轧件速度v3,测轧速编码器四实时测量上辊缝左侧轧件速度v4,由公式l=∫(v
4-v3)dt实时计算活套累积长度l;
80.4)实时比较套累积长度l和最大活套累积长度许用值l
max
=10m,调节快速辊主电机的转速。当|l|>10m且l>0,则增大主电机二转速直至v3>v4;当|l|>10m且l<0,则减小主电机二转速直至v3<v4,使活套累积长度l始终小于等于其最大许用值,即l≤10m;
81.5)实时监测活套架二位置及两个接近开关的信号变化,调节慢速辊主电机的转速。当接近开关二信号置1,则减小主电机一转速直至v3>v4;当接近开关一信号置1,则增大主电机一转速直至v3<v4,使得活套架二始终在接近开关一和接近开关二感应区之间运动。
82.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
83.以上所述仅是本技术的具体实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1