一种精密同步自动拧紧装置及方法与流程
1.本发明属于精密装配技术领域,特别涉及一种精密同步自动拧紧装置及方法。
背景技术:
2.精密仪表装配过程中,有时需要靠多个螺钉与压块一起作用将零件固定(如轴件通过板状/片状压块固定在待拧工件上),当螺钉之间间距较小时,通常采用人工分步拧紧的方式进行装配,以满足装配工艺需求,拧紧的先后顺序以及受限于工人师傅的经验,导致多个螺钉的拧紧的一致性较难保证。
技术实现要素:
3.为了克服现有技术中的不足,本发明人进行了锐意研究,提供了一种精密同步自动拧紧装置及方法,用于小空间范围内多个一字槽螺钉的同步拧紧,基于空间运动机构和图像识别,保证拧紧机构的批头顺利插入螺钉一字槽,实现多把拧紧机构同步拧紧,提高装配时多个螺钉拧紧的一致性,进而提高组件的装配质量。
4.本发明提供的技术方案如下:
5.第一方面,一种精密同步自动拧紧装置,包括:
6.基座,其为水平放置的板状结构,上板面支撑有两排相对安装的第一支撑架、位于两排第一支撑架之间的第二支撑架和待拧工件;
7.两排相对安装的第一支撑架,其上安装有水平和竖直方向的双自由度导轨组件;
8.位于两排第一支撑架之间的第二支撑架,其上安装有竖直方向的单自由度导轨;
9.两组自动拧紧单元,分别包括至少两个安装在两排第一支撑架的双自由度导轨组件上的自动拧紧机构,在双自由度导轨组件的带动下产生水平和竖直方向的位移;自动拧紧机构下端安装有一字批头,用于旋拧一字螺钉将压块固定至待拧工件上;
10.固定工装,其安装在第二支撑架的单自由度导轨上,在单自由度导轨的带动下产生竖直方向的位移;
11.视觉识别系统,其固定在固定工装上,以俯视角度获取一字批头上端图像和螺钉一字槽的图像;
12.处理器,其根据视觉识别系统获得的图像,确定一字批头下端一字和螺钉一字槽的角度差;
13.控制器,其调整自动拧紧机构下端一字批头的角度,使一字批头随自动拧紧机构下降后能够插入螺钉的一字槽,对螺钉实施同步拧紧。
14.进一步地,所述双自由度导轨组件包括水平方向导轨和竖直方向导轨,水平方向导轨沿水平方向固定安装在第一支撑架上,竖直方向导轨沿竖直方向固定安装在水平方向导轨的滑块上。
15.进一步地,所述两组自动拧紧单元中的自动拧紧机构分别通过转接板固定或直接固定在两竖直方向导轨的滑块上,两组自动拧紧单元中的自动拧紧机构的数目不少于单次
拧紧螺钉的数目。
16.进一步地,所述各组自动拧紧单元中的自动拧紧机构以高低交替方式安装,两组自动拧紧单元中相对的自动拧紧机构高低错位安装,高位自动拧紧机构下端安装有长一字批头,低位自动拧紧机构下端安装有短一字批头,长一字批头和短一字批头下端部齐平。
17.进一步地,所述自动拧紧机构下端均装有偏置头,一字批头安装在偏置头前端,用于缩小各一字批头的间距。
18.进一步地,所述一字批头的上端呈一字并与下端一字方向成90
°
,处理器可以通过识别一字批头上端一字的角度判断一字批头下端一字角度。
19.进一步地,所述视觉识别系统位于一字批头和待测工件上方,视觉识别系统包含相机、镜头和光源,相机安装在固定工装上,镜头安装在相机上,光源安装在固定工装的下方,镜头和相机实施拍照处理图像,光源用于拍摄图像时辅助补光照明。
20.进一步地,所述同步自动拧紧装置还包括卡位工装,所述卡位工装将待拧工件固定在基座上。
21.进一步地,所述卡位工装包括挡块和至少一组装拆结构,所述挡块为固定在基座上的半包围块体结构,所述装拆结构包括固定在基座上的耳座和穿过耳座上螺纹孔的螺丝,通过旋拧螺丝将待拧工件压紧至挡块上,实施待拧工件的固定。
22.第二方面,一种精密同步自动拧紧方法,包括:
23.将视觉识别系统沿第二支撑架的单自由度导轨方向移动到待拧工件上方,获取螺钉一字槽的图像;
24.使自动拧紧机构在双自由度导轨组件的带动下移动至待拧工件的螺钉上方,通过视觉识别系统获取一字批头上端图像;
25.处理器根据视觉识别系统获得的图像,确定一字批头下端一字和螺钉一字槽的角度差,通过控制器调整自动拧紧机构的一字批头角度;
26.使自动拧紧机构在双自由度导轨组件的带动下竖直下降,使一字批头插入螺钉一字槽中,在控制器控制下对螺钉实施同步拧紧。
27.根据本发明提供的一种精密同步自动拧紧装置及方法,具有以下有益效果:
28.(1)本发明提供的一种精密同步自动拧紧装置及方法,多个自动拧紧机构同步拧紧,可以保证压块结构多个螺钉拧紧的一致性;
29.(2)本发明提供的一种精密同步自动拧紧装置及方法,针对多个螺钉之间间距小的特点,采用了齿轮偏置头分别装上长短批头,利用高低错位来缩小拧紧机构批头之间的间距,实现小空间范围的自动拧紧;
30.(3)本发明提供的一种精密同步自动拧紧装置及方法,批头上端的形状呈一字,且与批头下端一字方向成90
°
,使视觉识别系统可以从同一方向识别批头角度和螺钉一字槽角度。
附图说明
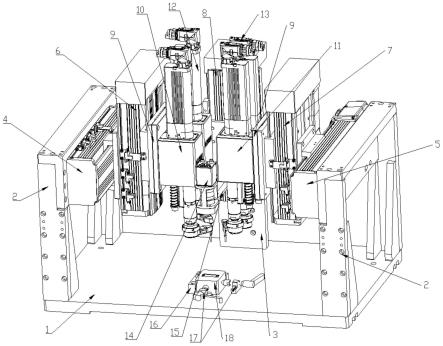
31.图1为本发明精密同步自动拧紧装置的结构示意图;
32.图2为本发明待拧工件的结构示意图;
33.图3为本发明自动拧紧机构的结构示意图;
34.图4为本发明批头的结构示意图;
35.图5为本发明视觉识别系统的结构示意图。
36.附图标号说明
37.1-基座;2-第一支撑架;3-第二支撑架;4-第一方向导轨;5-第二方向导轨;6-第三方向导轨;7-第四方向导轨;8-第五方向导轨;9-转接板;10-第一自动拧紧机构;11-第二自动拧紧机构;12-第三自动拧紧机构;13-第四自动拧紧机构;14-视觉识别系统;15-固定工装;16-挡块;17-装拆结构;18-待拧工件;21-偏置头;22-卡簧;23-短一字批头;24-长一字批头;25-相机;26-镜头;27-光源;28-压块;29-32-螺钉。
具体实施方式
38.下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
39.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
40.本发明提供了一种精密同步自动拧紧装置,如图1所示,包括基座1、第一支撑架2、第二支撑架3、第一方向导轨4、第二方向导轨5、第三方向导轨6、第四方向导轨7、第五方向导轨8、转接板9、第一自动拧紧机构10、第二自动拧紧机构11、第三自动拧紧机构12、第四自动拧紧机构13、视觉识别系统14、固定工装15、挡块16、装拆结构17、处理器和控制器。其中,基座1为水平放置的板状结构,第一支撑架2、第二支撑架3竖直固定安装在基座1上;第一方向导轨4、第二方向导轨5沿y方向分别固定安装在第一支撑架2上,第三方向导轨6、第四方向导轨7沿竖直方向(z方向)分别与第一方向导轨4、第二方向导轨5对接(即分别固定在第一方向导轨4、第二方向导轨5的滑块上),组成了双自由度导轨组件,实现了z方向导轨相对于y方向导轨沿y方向移动。第五方向导轨8竖直固定安装在第二支撑架3上,视觉识别系统14通过固定工装15安装在第五方向导轨8上,在第五方向导轨8的带动下竖直移动。第一支撑架2可为两排相对安装的龙门架,第一方向导轨4、第二方向导轨5可安装在龙门架的横梁上。
41.如图3所示,第一自动拧紧机构10、第三自动拧紧机构12作为一组自动拧紧单元通过转接板9固定或直接安装在第三方向导轨6的滑块上,第二自动拧紧机构11、第四自动拧紧机构13作为一组自动拧紧单元通过转接板9固定或直接安装在第四方向导轨7的滑块上。图1中示出一组自动拧紧单元包括两个自动拧紧机构,但不限于两个,还可为三个及以上,考虑到待拧紧螺钉之间间距较小,受空间限制,一般一组自动拧紧单元中不超过三个自动拧紧机构。
42.如图1、3所示,自动拧紧机构10-13的下端均装有偏置头21,其中第一自动拧紧机构10、第四自动拧紧机构13在转接板9上靠下安装,其上的偏置头21均通过卡簧22装有短一字批头23,第二自动拧紧机构11、第三自动拧紧机构12在转接板9上靠上安装,其上的偏置头21通过卡簧22装有长一字批头24,利用偏置头21高低错位来缩小批头之间的间距,实现小空间的多个螺钉同步拧紧。如图2所示,如待拧工件18上的压块28通过至少四个螺钉29-32固定,相邻两个螺钉的间距小于7mm,如螺钉29和螺钉31间距小于7mm,螺钉30和螺钉32间
距也小于7mm,通过偏置头21和批头高低错位设置,可实现螺钉29-32同步拧紧。在实际应用中,压块28自身可为待安装零件,或者压块28作为辅助压紧工装,压块28和待拧工件18之间设置待安装零件,利用压块28压住待安装零件,将待安装零件压紧至待拧工件18上。
43.如图4所示,长一字批头24和短一字批头23下端均为一字头,上端呈一字并与下端一字方向成90
°
,处理器可以通过识别一字批头上端一字的角度判断批头下端一字角度。长一字批头24和短一字批头23上端加工有环槽或弧形槽,用于与卡簧22配合,将批头装入偏置头21前端纵向通孔中(而不使偏置头21掉落),批头自上而下铣削限位台阶,自下端插入偏置头21前端纵向通孔中时与通孔内限位台阶接触,避免旋紧螺钉时受向上压力脱出偏置头21。
44.如图5所示,视觉识别系统14位于偏置头21/一字批头和待测工件18上方,视觉识别系统14包含相机25、镜头26和光源27;相机25安装在固定工装15上,镜头26安装在相机25上,光源27安装在固定工装15的下方,镜头26和相机25实现拍照处理图像,光源27用于拍摄图像时,实现辅助补光照明功能,根据拍摄图像,计算机计算得出一字批头上下端一字角度和螺钉一字槽角度。
45.如图1所示,为避免螺钉旋紧过程中待拧工件18发生移动,通过包括挡块16和装拆结构17的卡位工装限制待拧工件18,挡块16和装拆结构17均设置在基座1的上表面,挡块16为固定在基座1上的半包围块体结构,所述装拆结构17包括固定在基座1上的耳座和穿过耳座上螺纹孔的螺丝(如把手螺丝),通过旋拧螺丝将待拧工件18压紧至挡块16上,实施待拧工件18的固定。图1中装拆结构17包括两组,在两个垂直方向安装,旋拧把手螺丝,将待拧工件18压紧至挡块16上。
46.自动拧紧机构的工作过程为:视觉识别系统14沿第五方向导轨8方向移动到待拧工件18上方,获取四个螺钉29-32一字槽的角度;自动拧紧机构10-13沿第一方向导轨4、第二方向导轨5方向移动至待拧工件18的四个螺钉29-32上方,通过视觉识别系统14获取短一字批头23、长一字批头24上端一字角度,处理器确定短一字批头23、长一字批头24下端一字与螺钉一字槽的角度差值,通过控制器调整四个自动拧紧机构的短一字批头23、长一字批头24角度;自动拧紧机构10-13沿第三方向导轨6、第四方向导轨7竖直下降,使短一字批头23、长一字批头24插入螺钉29-32一字槽,对螺钉29-32实现同步拧紧。其中第一自动拧紧机构10、第二自动拧紧机构11、第三自动拧紧机构12、第四自动拧紧机构13分别对应螺钉29、30、31、32。
47.以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
48.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1