一种四轴自动铣刀打孔机及其控制方法与流程
1.本发明涉及自动化加工领域,更具体地说,它涉及一种四轴自动铣刀打孔机及其控制方法。
背景技术:
2.铣刀,是用于铣削加工的、具有一个或多个刀齿的旋转刀具。工作时各刀齿依次间歇地切去工件的余量。铣刀主要用于在铣床上加工平面、台阶、沟槽、成形表面和切断工件等。
3.打孔机,是用于钻孔加工、于工件上开设槽孔的旋转钻头,工作时通过电机不断控制钻头位移,从而控制打孔深度以及角度,目前市场上的铣刀机、打孔机针对细长条状工件加工时采用分置流水线工作,其次当单次加工完成时,都需要手工进行调整下一次的加工位置,由于细长条状工件原料需要高精度的加工,此种加工设备占用空间较大,且效率较为低下,因此亟需一种针对细长条状工件、自动化的、可精准调位的铣刀打孔机。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种四轴自动铣刀打孔机及其控制方法。
5.为实现上述目的,本发明提供了如下技术方案:一种四轴自动铣刀打孔机,包括工作平台、第一铣刀模块、第二铣刀模块、打孔模块和夹持模块,夹持模块用于夹持工件以及维持工件稳定,第一铣刀模块和第二铣刀模块用于对工件周侧进行加工,打孔模块用于于工件上开设槽孔,第一铣刀模块、第二铣刀模块、打孔模块和夹持模块设置于工作平台上。
6.本发明进一步设置为:夹持模块包括第一夹持手、第二夹持手、夹持手电机、夹持手安装座和夹持手滑板,夹持手电机通过夹持手安装座固定设置于工作平台上,第一夹持手固定设置于夹持手安装座上,夹持手电机用于推动第一夹持手做往复运动,第二夹持手通过夹持手安装座固定设置于工作平台上。
7.本发明进一步设置为:第一铣刀模块包括铣刀安装座、铣刀安装架、铣刀转轮、铣刀滑轨、第一铣刀电机、第二铣刀电机、铣刀转轴和铣刀刀轮,铣刀安装座固定设置于工作平台上,且设置于铣刀滑轨上,铣刀安装座内部腔室用于安装放置铣刀转轮,铣刀转轮用于调整第一铣刀模块正对加工工件位置,铣刀安装架固定设置于铣刀安装座上,第一铣刀电机设置于铣刀安装座上,第二铣刀电机设置于铣刀安装架上,铣刀安装架上还设置有铣刀转轴,铣刀刀轮设置于铣刀转轴端侧,第一铣刀电机用于调整第一铣刀模块位置,第二铣刀电机输出端与铣刀转轴转动连接。
8.本发明进一步设置为:打孔模块包括打孔安装座、打孔安装架、第一打孔电机、第二打孔电机、打孔钻头和打孔转轮,打孔安装座固定设置于工作平台上,打孔安装架设置于打孔安装座上,第一打孔电机设置于打孔安装座上,第一打孔安装座用于推动打孔安装座进行位移,打孔转轮设置于打孔安装座内腔室,且用于调整打孔钻头加工角度,打孔钻头和
第二打孔电机固定设置于打孔安装架上,第二打孔电机输出端与打孔钻头转动连接。
9.本发明进一步设置为:第一夹持手包括第一夹持手电机、第一夹持手压板和第一夹持手夹板,第一夹持手电机用于推动第一夹持手夹板与第一夹持手压板共同固定工件,第二夹持手包括第二夹持手电机、第二夹持手压板和第二夹持手夹板,第二夹持手电机用于推动第二夹持手夹板与第二夹持手压板共同固定工件。
10.本发明进一步设置为:第二铣刀模块配置与第一铣刀模块相同,第一铣刀模块和第二铣刀模块设置于夹持模块异侧。
11.本发明进一步设置为:工作平台上设置有用于收集工件的收纳槽,收纳槽设置于第二夹持手下方。
12.本发明进一步设置为:一种适用于四轴自动铣刀打孔机的控制方法,包括以下步骤,s1、上料阶段,通过夹持模块对工件进行移动上料,包括以下步骤,s10、第一夹持手工作阶段,第一夹持手电机控制第一夹持手夹紧工件,第一夹持手电机推动第一夹持手,将工件输送于第二夹持手内;s11、第二夹持手工作阶段,第二夹持手夹紧工件,第一夹持手放松,并通过第一夹持手电机退回原处,第一夹持手退回原处后,对工件进行夹紧;s2、铣件阶段,通过第一铣刀电机对铣刀刀轮进刀位置进行调整,通过第二铣刀电机控制铣刀刀轮转动,对工件进行加工,第一铣刀模块和第二铣刀模块同时进行工作;s3、打孔阶段,通过第一打孔电机对打孔钻头进刀位置进行调整,通过第二打孔电机控制打孔钻头转动,对工件进行加工;s4、裁料阶段,通过第一铣刀模块对工件进行切割,加工完成的工件掉落收集至收纳槽;s5、重复自动上料阶段,第二夹持手放松,重复步骤s1。
13.通过采用上述技术方案,夹持模块通过夹持手针对细长条状工件进行自动化转运,夹持手即可保证工件稳定夹持,又可以通过夹持手电机控制夹持手对工件进行上料,通过第一夹持手和第二夹持手实现了自动化的上料。
14.铣刀模块可通过铣刀转轮手动调整进刀位置,可完成对工件的斜面加工,提高工件的加工精度,通过第一铣刀电机控制铣刀刀轮前后进退,完成工件的加工处理,同时铣刀刀轮可对加工完成的工件进行切割,实现自动化加工切割,通过第一铣刀模块和第二铣刀模块可对工件不同方位同时进行加工。
15.打孔模块可通过打孔转轮手动调整进刀位置,可完成对工件内部的打孔和斜面打孔,可保证提高工件的加工精度,通过第一打孔电机控制打孔钻头前后进退,完成工件的加工处理,实现自动化加工打孔。
附图说明
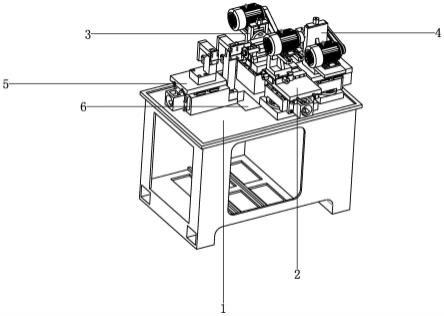
16.图1为本发明一种四轴自动铣刀打孔机实施例的结构示意图;图2为夹持模块结构示意图;图3为第一铣刀模块结构示意图;图4为打孔模块结构示意图;
图中附图标记:1、工作平台;2、第一铣刀模块;21、铣刀安装座;22、铣刀安装架;23、铣刀转轮;24、铣刀滑轨;25、第一铣刀电机;26、第二铣刀电机;27、铣刀转轴;28、铣刀刀轮;3、第二铣刀模块;4、打孔模块;41、打孔安装座;42、打孔安装架;43、第一打孔电机;44、第二打孔电机;45、打孔钻头;46、打孔转轮;5、夹持模块;51、第一夹持手;511、第一夹持手电机;512、第一夹持手压板;513、第一夹持手夹板;52、第二夹持手;53、夹持手电机;54、夹持手安装座;55、夹持手滑板;6、收纳槽。
具体实施方式
17.参照图1至图4对本发明一种四轴自动铣刀打孔机实施例做进一步说明。
18.为了易于说明,实施例中使用了诸如“上”、“下”、“左”、“右”等空间相对术语,用于说明图中示出的一个元件或特征相对于另一个元件或特征的关系。应该理解的是,除了图中示出的方位之外,空间术语意在于包括装置在使用或操作中的不同方位。例如,如果图中的装置被倒置,被叙述为位于其他元件或特征“下”的元件将定位在其他元件或特征“上”。因此,示例性术语“下”可以包含上和下方位两者。装置可以以其他方式定位(旋转90度或位于其他方位),这里所用的空间相对说明可相应地解释。
19.而且,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个与另一个具有相同名称的部件区分开来,而不一定要求或者暗示这些部件之间存在任何这种实际的关系或者顺序。
20.一种四轴自动铣刀打孔机,包括工作平台1、第一铣刀模块2、第二铣刀模块3、打孔模块4和夹持模块5,夹持模块5用于夹持工件以及维持工件稳定,第一铣刀模块2和第二铣刀模块3用于对工件周侧进行加工,打孔模块4用于于工件上开设槽孔,第一铣刀模块2、第二铣刀模块3、打孔模块4和夹持模块5设置于工作平台1上,夹持模块5设置于工作平台1端侧,第一铣刀模块2和第二铣刀模块3分别设置于夹持模块5左右侧,打孔模块4正对夹持模块5设置于工作平台1上,第一铣刀模块2和第二铣刀模块3上设置的铣刀刀轮28用于对工件不同端侧进行加工,打孔模块4输出端设置于第一铣刀模块2和第二铣刀模块3之间,用于对工件进行打孔加工,工作平台1上设置有用于收集工件的收纳槽6,收纳槽6设置于第二夹持手52下方,收纳槽6设置于第二夹持手52的垂直下方,当工件加工完毕被切割时,可直接掉落并储存与收纳槽6内。
21.夹持模块5包括第一夹持手51、第二夹持手52、夹持手电机53、夹持手安装座54和夹持手滑板55,夹持手电机53通过夹持手安装座54固定设置于工作平台1上,夹持手安装座54内部中空形成容纳腔室,夹持手电机53设置于容纳腔室内,其输出端与夹持手滑板55固定连接,通过夹持手电机53提供动力,控制夹持手滑板55运动,从而带动第一夹持手51做往复运动,第一夹持手51固定设置于夹持手滑板55上,第二夹持手52通过夹持手安装座54固定设置于工作平台1上,第二夹持手52固定不动,作为稳定端夹持工件,第一夹持手51包括第一夹持手51电机、第一夹持手51压板和第一夹持手51夹板,第一夹持手51电机用于推动第一夹持手51夹板与第一夹持手51压板共同固定工件,当第一夹持手51电机推动第一夹持手51夹板时,第一夹持手51夹板绕轴运动,与第一夹持手51压板形成夹角,此时第一夹持手51为放松状态,当第一夹持手51电机退回拉取第一夹持手51夹板时,第一夹持手51夹板与第一夹持手51压板贴合,此时第一夹持手51为收缩状态,用于夹紧固定工件,第二夹持手52
包括第二夹持手52电机、第二夹持手52压板和第二夹持手52夹板,第二夹持手52电机用于推动第二夹持手52夹板与第二夹持手52压板共同固定工件,第二夹持手52工作原理与第一夹持手51工作原理相同,通过第一夹持手51和第二夹持手52的收缩、舒张以及夹持手电机53的推动,完成工件的全自动上料与固定夹紧,可保证在加工工件时,工件稳定设置于夹持模块5上。
22.第一铣刀模块2包括铣刀安装座21、铣刀安装架22、铣刀转轮23、铣刀滑轨24、第一铣刀电机25、第二铣刀电机26、铣刀转轴27和铣刀刀轮28,铣刀安装座21固定设置于工作平台1上,且设置于铣刀滑轨24上,铣刀安装座21内部腔室用于安装放置铣刀转轮23,铣刀转轮23用于调整第一铣刀模块2正对加工工件位置,当需要调整进刀角度时,可手动旋转铣刀转轮23,铣刀转轮23通过齿轮啮合调整角度,精度较高,可对进刀角度进行微调,铣刀安装架22固定设置于铣刀安装座21上,第一铣刀电机25设置于铣刀安装座21上,第二铣刀电机26设置于铣刀安装架22上,铣刀安装架22上还设置有铣刀转轴27,铣刀刀轮28设置于铣刀转轴27端侧,第二铣刀电机26输出端通过皮带与铣刀转轴27固定连接,可通过手动调节第二铣刀电机26的固定位置从而调节皮带轮松紧,铣刀刀轮28通过铣刀第一电机控制铣刀安装座21运动控制进刀距离,从而完成车铣任务,第二铣刀模块3配置和工作原理于第一铣刀模块2相同,第一铣刀模块2和第二铣刀模块3设置于夹持模块5异侧。
23.打孔模块4包括打孔安装座41、打孔安装架42、第一打孔电机43、第二打孔电机44、打孔钻头45和打孔转轮46,打孔安装座41固定设置于工作平台1上,打孔安装架42设置于打孔安装座41上,第一打孔电机43设置于打孔安装座41上,打孔安装座41内部形成容纳腔室,用于方式第一打孔电机43,第一打孔安装座41用于推动打孔安装座41进行位移,从而控制打孔钻头45给进,打孔转轮46设置于打孔安装座41内腔室,且用于调整打孔钻头45加工角度,通过手动可调整打孔钻头45进刀角度,从而完成精度加工,打孔钻头45和第二打孔电机44固定设置于打孔安装架42上,第二打孔电机44输出端与打孔钻头45通过皮带转动连接,打孔钻头45周侧设置有打孔基座,打孔基座与打孔安装架42通过螺丝固定连接,打孔钻头45设置为长条形圆杆,通过第二打孔电机44提供动力控制打孔钻头45转动,从而对工件表面进行打孔。一种适用于四轴自动铣刀打孔机的控制方法,包括以下步骤:s1、上料阶段,通过夹持模块对工件进行移动上料,包括以下步骤,s10、第一夹持手工作阶段,第一夹持手电机控制第一夹持手夹紧工件,第一夹持手电机推动第一夹持手,将工件输送于第二夹持手内;s11、第二夹持手工作阶段,第二夹持手夹紧工件,第一夹持手放松,并通过第一夹持手电机退回原处,第一夹持手退回原处后,对工件进行夹紧;s2、铣件阶段,通过第一铣刀电机对铣刀刀轮进刀位置进行调整,通过第二铣刀电机控制铣刀刀轮转动,对工件进行加工,第一铣刀模块和第二铣刀模块同时进行工作;s3、打孔阶段,通过第一打孔电机对打孔钻头进刀位置进行调整,通过第二打孔电机控制打孔钻头转动,对工件进行加工;s4、裁料阶段,通过第一铣刀模块对工件进行切割,加工完成的工件掉落收集至收纳槽;s5、重复自动上料阶段,第二夹持手放松,重复步骤s1。
24.步骤s1中,当夹持模块上无工件时,第一夹持手和第二夹持手为放松状态,夹持手
滑板设置于初始端侧,首先通过人工将工件插接于第一夹持手内,此时第一夹持手收缩夹紧工件,夹持手电机推动夹持手滑板,通过第一夹持手带动工件,将工件输送至第二夹持手,然后第二夹持手收缩夹紧工件,第一夹持手放松,并退回至初始端侧,且再次夹紧工件,此状态下工件夹持稳定并完成自动化上料,当对工件加工完成后,第二夹持手放松,通过第一夹持手夹紧工件向前输送后,第二夹持手收缩,第一夹持手放松后退回初始端侧并再次夹紧工件。
25.步骤s2中,当工件夹紧后,通过第一铣刀模块和第二铣刀模块对工件进行加工,工件待加工端侧与铣刀刀轮处于同一平面,通过转动铣刀转轮即可调整铣刀进刀角度,通过第一铣刀电机进退可完成对工件的加工成型,第一铣刀模块和第二铣刀模块工作原理相同,且可同时进行工作,用于对工件不同侧面进行加工。
26.步骤s3中,当工件夹紧后,通过第二打孔电机带动打孔钻头于工件表面进行加工,通过打孔转轮即可调整打孔钻头进刀角度,通过第一打孔电机进退可完成对工件的加工成型。
27.步骤s4中,通过第一铣刀电机控制铣刀刀轮对工件进行切割,工件被切割后自动掉落至收纳槽内,方便人员收集。
28.步骤s5中,当工件切割收集完毕时,第二夹持手放松,重复步骤s1,对工件完成自动化上料。
29.以上所述仅为本发明的较佳实施例,并不用以限制本发明,本领域的技术人员在本发明技术方案范围内进行通常的变化和替换都应包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1