一种电梯小门套自动焊接装置的制作方法
1.本发明涉及电梯小门套焊接技术领域,尤其涉及一种电梯小门套自动焊接装置。
背景技术:
2.广阔的市场需求及严格的焊接质量要求对电梯行业的质量控制提出了更高的要求,焊接的质量问题越来越多地受到关注。目前电梯行业的生产主要还是由人工操作完成,部分采用机器人进行焊接,其安装调试过程十分麻烦。
3.经检索,中国专利申请号为cn202022761076.x的专利,公开了一种小门套焊接机器人工装,包括焊接平台、焊接机器人和隔离围栏,所述焊接机器人两侧设有焊接平台,所述焊接平台和焊接机器人之间设有用于隔离人员和保护加工线的隔离围栏,所述焊接平台前端设有用于控制焊接平台升降的控制移动定位装置,焊接机器人两端设有焊接平台,可以保证一个焊接平台工作结束后另一侧的焊接平台接上,极大地缩短了工作时间,在焊接机器人不工作时,隔离围栏为升起状态,一端的焊接平台前端的控制移动定位装置处于下降状态。
4.上述专利中的焊接机器人工装存在以下不足:该装置将焊接平台与焊接机器人分开安装,二者之间连接较弱,不便于进行机器人工作调试。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种电梯小门套自动焊接装置。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种电梯小门套自动焊接装置,包括:
8.安装底座,所述安装底座包括定位底板,所述定位底板的上表面依次固定安装有第一安装板、第二安装板和第三安装板,所述第一安装板的上表面固定安装有弧焊电源,所述第二安装板的上表面固定安装有工业机器人,所述第三安装板的上表面固定安装有清枪站;
9.所述定位底板的两侧分别设置有第一安装底板和第二安装底板,所述第一安装底板的上表面固定安装有第一装夹工装,所述第二安装底板的上表面固定安装有第二装夹工装,所述定位底板设置为对称的两部分,所述第一安装底板与第二安装底板结构相同且尺寸相同,所述第一安装底板设置为对称的两部分。
10.作为本发明一种优选的:所述定位底板两端的两侧均固定连接有限位连接臂,所述限位连接臂分别与第一安装底板和第二安装底板固定连接,所述定位底板、第一安装底板和第二安装底板的两侧均固定安装有限位连接杆,所述第一安装底板和第二安装底板的上表面均对称设置有多个插接座。
11.作为本发明一种优选的:所述第一装夹工装和第二装夹工装结构相同且尺寸相同,所述第一装夹工装和第二装夹工装分别设置于工业机器人的两侧。
12.作为本发明一种优选的:所述第一装夹工装包括支撑架,所述支撑架的顶端固定安装有支撑台,所述支撑台的顶端固定安装有安装框架,所述安装框架的顶端依次设置有第一固定组件、第二固定组件和第三固定组件。
13.作为本发明一种优选的:所述安装框架的顶端滑动安装有第一滑动板,且所述安装框架的顶端滑动安装有第二滑动板,所述第一滑动板的上表面固定连接有限位挡板。
14.作为本发明一种优选的:所述安装框架顶端的一边侧固定连接有定位连接板,所述定位连接板的顶端固定安装有驱动液压缸,所述驱动液压缸的液压杆固定连接有连接套筒,所述连接套筒的正面固定连接有推动板,所述推动板的两端均滑动连接有滑动导杆,所述滑动导杆的两端均固定连接有固定块,所述固定块固定安装于定位连接板的上表面。
15.作为本发明一种优选的:所述安装框架的两侧均固定连接有滑动导轨,所述滑动导轨的外壁滑动连接有两个滑动连接块。
16.作为本发明一种优选的:所述第一固定组件包括定位连接杆,所述定位连接杆的一侧固定连接有连接角板,所述连接角板的底端固定连接有连接弹簧,所述定位连接杆一侧的顶端转动连接有转动限位杆,所述转动限位杆的一端卡接有固定连接杆。
17.作为本发明一种优选的:所述定位连接杆与安装框架一侧的滑动连接块固定连接,所述固定连接杆与安装框架另一侧的滑动连接块固定连接,所述连接弹簧与转动限位杆的一端固定连接。
18.作为本发明一种优选的:所述第二固定组件与第一固定组件结构相同且尺寸相同,所述第三固定组件与第一固定组件结构相同,且所述第三固定组件固定安装于定位连接板的上表面,所述第一固定组件、第二固定组件和第三固定组件的内部固定安装有门套立柱。
19.本发明的有益效果为:
20.1.该电梯小门套自动焊接装置通过安装底座对其他装置进行安装,安装底座各个组件之间的距离均可以根据实际安装需要进行调节,使整体装置的安装更加简单,同时可以更加简单地对整体装置进行安装调试,使整体装置的使用更加简单。
21.2.该电梯小门套自动焊接装置通过多个定位组件对门套立柱进行安装固定,可以同时进行多根门套立柱的焊接,使门套立柱的焊接更加简单,提高整体装置的工作效率。
22.3.该电梯小门套自动焊接装置通过滑动连接块对第一定位组件和第二定位组件进行调节,使二者可以对更加简单地进行待焊接位置的定位,便于整体装置工作。
附图说明
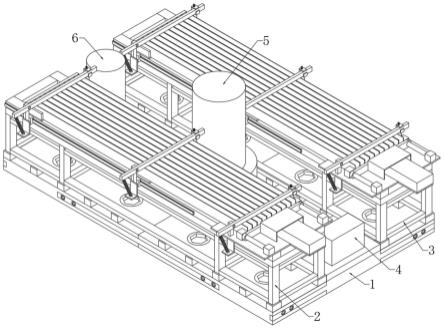
23.图1为本发明整体装配的结构示意图;
24.图2为本发明安装底座的结构示意图;
25.图3为本发明定位底板的结构示意图;
26.图4为本发明装夹工装安装门套立柱的结构示意图;
27.图5为本发明装夹工装的结构示意图;
28.图6为本发明装夹工装的支撑架结构示意图。
29.图中:1、安装底座;101、定位底板;102、第一安装底板;103、第二安装底板;104、限位连接杆;105、插接座;106、第一安装板;107、第二安装板;108、第三安装板;109、限位连接
臂;2、第一装夹工装;201、支撑架;202、支撑台;203、安装框架;204、第一固定组件;2041、定位连接杆;2042、连接角板;2043、连接弹簧;2044、转动限位杆;2045、固定连接杆;205、门套立柱;206、第二固定组件;207、第三固定组件;208、定位连接板;209、第一滑动板;210、限位挡板;211、滑动导轨;212、滑动连接块;213、第二滑动板;214、驱动液压缸;215、连接套筒;216、推动板;217、固定块;218、滑动导杆;3、第二装夹工装;4、弧焊电源;5、工业机器人;6、清枪站。
具体实施方式
30.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
31.下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
32.在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
33.在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
34.一种电梯小门套自动焊接装置,如图1至图6所示,包括:
35.安装底座1,安装底座1包括定位底板101,定位底板101的上表面依次固定安装有第一安装板106、第二安装板107和第三安装板108,第一安装板106的上表面固定安装有弧焊电源4,第二安装板107的上表面固定安装有工业机器人5,第三安装板108的上表面固定安装有清枪站6;
36.弧焊电源4选用逆变式mig/mag弧焊机,工业机器人5选用型号为irb-1410的机器人,清枪站6选用三位一体型,型号为jy-2000s,本装置另配置工业计算机,用于控制弧焊电源4、工业机器人5和清枪站6的工作。
37.定位底板101的两侧分别设置有第一安装底板102和第二安装底板103,第一安装底板102的上表面固定安装有第一装夹工装2,第二安装底板103的上表面固定安装有第二装夹工装3,定位底板101、第一安装底板102和第二安装底板103的两侧均固定安装有限位连接杆104,定位底板101设置为对称的两部分,两部分通过限位连接杆104固定连接,限位连接杆104通过螺栓与定位底板101固定连接,二者之间的距离可以调节,根据实际安装位置与第一装夹工装2和第二装夹工装3的长度进行调试,第一安装底板102与第二安装底板103结构相同且尺寸相同,第一安装底板102设置为对称的两部分,第一安装底板102和第二安装底板103与定位底板101的结构相同,且调节方式相同。
38.定位底板101两端的两侧均固定连接有限位连接臂109,限位连接臂109分别与第一安装底板102和第二安装底板103固定连接,限位连接臂109通过螺栓与第一安装底板102和第二安装底板103固定连接,第一安装底板102和第二安装底板103与定位底板101之间的
距离根据实际安装需要进行调节,第一安装底板102和第二安装底板103的上表面均固定连接有多个插接座105,对称设置在两部分的顶端。
39.实施例一:根据实际安装需要,与预定的安装空间大小,将第一安装底板102、第二安装底板103与定位底板101通过沉头螺钉固定在指定位置,安装时,首先通过限位连接杆104调节第一安装底板102和第二安装底板103的长度,然后通过限位连接臂109将定位底板101与第一安装底板102和第二安装底板103固定连接,接着通过限位连接臂109固定定位底板101的两部分;
40.继而通过沉头螺钉将第一安装底板102、第二安装底板103和定位底板101固定安装在指定位置,依次将弧焊电源4、工业机器人5和清枪站6依次固定安装在第一安装板106、第二安装板107和第三安装板108的上表面,最后将第一装夹工装2和第二装夹工装3分别固定安装在第一安装底板102和第二安装底板103的上表面。
41.第一装夹工装2和第二装夹工装3结构相同且尺寸相同,第一装夹工装2和第二装夹工装3分别设置于工业机器人5的两侧,第一装夹工装2和第二装夹工装3可以平行设置,也可以对称设置、中心对称设置,根据实际安装需要,对第一装夹工装2和第二装夹工装3的安装方式进行调整(注:本装置附图中(图1所示),第一装夹工装2和第二装夹工装3为平行设置)。
42.第一装夹工装2包括支撑架201,支撑架201包括两个支撑框,两个支撑框通过多根横臂梁固定连接,横臂梁的长度根据实际装配需要选用,支撑框包括四根支撑柱,支撑柱的底端插接在插接座105内部,通过螺栓进行固定,支撑架201的顶端固定安装有支撑台202,支撑台202用于支撑顶部装置,支撑台202的顶端固定安装有安装框架203,安装框架203的顶端依次设置有第一固定组件204、第二固定组件206和第三固定组件207,三个固定组件用于固定门套立柱205,工业机器人5对门套立柱205的内部结构进行焊接。
43.安装框架203的顶端滑动安装有第一滑动板209,且安装框架203的顶端滑动安装有第二滑动板213,第一滑动板209和第二滑动板213与安装框架203滑动连接,可以根据门套立柱205的长度调节第一滑动板209和第二滑动板213的位置,第一滑动板209的上表面固定连接有限位挡板210,限位挡板210一侧面的两边侧固定连接有限位侧板,限位挡板210配合限位侧板对门套立柱205进行限位固定,安装框架203的两侧均固定连接有滑动导轨211,滑动导轨211的外壁滑动连接有两个滑动连接块212,第一固定组件204和第二固定组件206分别与两个滑动连接块212固定连接。
44.安装框架203顶端的一边侧固定连接有定位连接板208,定位连接板208的顶端固定安装有驱动液压缸214,驱动液压缸214的液压杆固定连接有连接套筒215,连接套筒215的正面固定连接有推动板216,推动板216的两端均滑动连接有滑动导杆218,滑动导杆218的两端均固定连接有固定块217,固定块217固定安装于定位连接板208的上表面;
45.启动驱动液压缸214,驱动液压缸214带动连接套筒215滑动,连接套筒215带动推动板216滑动,推动板216在两个滑动导杆218的限制下滑动,推动多个门套立柱205,使多个门套立柱205端部平齐,便于工业机器人5进行焊接。
46.第一固定组件204包括定位连接杆2041,定位连接杆2041的一侧固定连接有连接角板2042,连接角板2042的底端固定连接有连接弹簧2043,定位连接杆2041一侧的顶端转动连接有转动限位杆2044,转动限位杆2044的一端卡接有固定连接杆2045;
47.固定连接杆2045一侧的中部固定连接有限位卡板,且固定连接杆2045的顶端转动安装有转动卡板,转动卡板的顶端螺纹连接有固定螺钉,固定螺钉贯穿转动卡板并螺纹连接在固定连接杆2045的顶端,转动限位杆2044的一端卡接在转动卡板和限位卡板之间。
48.定位连接杆2041与安装框架203一侧的滑动连接块212固定连接,固定连接杆2045与安装框架203另一侧的滑动连接块212固定连接,连接弹簧2043与转动限位杆2044的一端固定连接,连接弹簧2043用于转动限位杆2044的限位,当固定连接杆2045解除对转动限位杆2044的限位时,转动限位杆2044在连接弹簧2043的作用下转动,解除对门套立柱205的限位。
49.第二固定组件206与第一固定组件204结构相同且尺寸相同,第三固定组件207与第一固定组件204结构相同,且第三固定组件207固定安装于定位连接板208的上表面,即:第三固定组件207的定位连接杆2041和固定连接杆2045焊接在定位连接板208的上表面,连接角板2042焊接在定位连接板208的下表面,第一固定组件204、第二固定组件206和第三固定组件207的内部固定安装有门套立柱205。
50.实施例二:在实施例一的基础上,首先将多根门套立柱205的待焊接面向上,然后依次放置在第一滑动板209、第二滑动板213和定位连接板208的上表面,使多根门套立柱205的一端设置在两个限位侧板之间,然后启动驱动液压缸214,驱动液压缸214通过推动板216使多根门套立柱205的一端平齐,且另一端与限位挡板210接触,然后依次转动第一固定组件204、第二固定组件206和第三固定组件207的转动限位杆2044,对多根门套立柱205进行进一步固定,同时通过转动限位杆2044确定工业机器人5的焊接位置,即:将待焊接部件安装在门套立柱205的内部,以转动限位杆2044对待焊接部件进行定位(注:本装置中,第一装夹工装2和第二装夹工装3均可同时装夹十根门套立柱205)。
51.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1