带自动仿形功能的风机叶片切割设备及切割方法与流程
1.本发明涉及一种退役风机叶片领域,尤其涉及带自动仿形功能的风机叶片切割设备及切割方法。
背景技术:
2.随着风电行业的发展,退役风机的叶片由于环保要求和占地特征需要采取物理化学方法对复合材料进行处理。由于处理设施距离风场较远,叶片体积大,运输不方便,运输成本高,需要进行预处理,根据后续处理工艺要求先将叶片切割成小块,便于装运和后续进一步的处理利用。
3.然而,叶片表面为弯曲表面,严重降低叶片的切割效率。
技术实现要素:
4.有鉴于此,本发明提供带自动仿形功能的风机叶片切割设备及切割方法,该设备利用多个模组的相互配合以使得切割模组自适应弯曲的叶片表面,以提高叶片的切割效率。
5.为解决上述技术问题,本发明采用以下技术方案:
6.一方面,根据本发明实施例的带自动仿形功能的风机叶片切割设备,包括:
7.平移模组;
8.旋转模组,其安装于所述平移模组上;
9.第一支撑架,其安装于所述旋转模组上,所述第一支撑架在所述旋转模组与所述平移模组的作用下分别做旋转运动与平移运动;
10.随动模组,其一端安装于所述第一支撑架的顶端;
11.第二支撑架,其连接于所述随动模组的另一端;
12.切割模组,其安装于所述第二支撑架上,并用于对叶片进行切割;其中,
13.所述随动模组包括随动架、第一驱动组件和第二驱动组件,所述第一驱动组件固定安装于所述第一支撑架的顶端,所述第二驱动组件固定安装于所述第二支撑架上,所述随动架的两端分别连接于所述第一驱动组件与第二驱动组件上,所述随动架在所述第一驱动组件与第二驱动组件的驱动力下沿竖直方向运动。
14.优选地,还包括:
15.吸尘模组,其安装于所述第二支撑架上并与所述切割模组相邻设置,所述吸尘模组用于吸收所述切割模组切割叶片产生的粉尘。
16.优选地,所述平移模组包括:
17.弦向组件,所述弦向组件包括第一载体、第一导轨、弦向驱动件和第一滑块,所述第一导轨与弦向驱动件固定安装于所述第一载体上,所述第一导轨与第一滑块滑动连接,所述第一支撑架安装于所述第一滑块上,所述第一支撑架在所述弦向驱动件的驱动力下沿所述第一导轨方向做运动;
18.径向组件,所述径向组件包括第二载体、齿条件、齿轮件和径向驱动件,所述齿条件与径向驱动件固定安装于所述第二载体上,所述第二载体固定安装于所述第一滑块上,所述齿条件啮合所述齿轮件,所述第一支撑架安装于所述齿轮件上,所述第一支撑架在所述径向驱动件与弦向驱动件的驱动力下分别沿所述齿条件方向与第一导轨方向运动。
19.优选地,所述旋转模组包括转向盘与旋转驱动件,所述转向盘安装于所述旋转驱动件,所述旋转驱动件固定安装于所述第二载体上,所述第一支撑架固定安装于所述转向盘上,所述第一支撑架在所述旋转驱动件的驱动力下跟随所述转向盘做旋转运动。
20.优选地,所述切割模组包括第三驱动组件、切割片和压力传感器,所述切割片安装于所述第三驱动组件上,所述第三驱动组件固定安装于所述第二支撑架上,所述切割片在所述第三驱动组件的驱动力下进行切割操作,所述压力传感器位于所述切割片的上方,所述压力传感器用于采集所述切割片处于切割状态时的数据。
21.优选地,所述吸尘模组包括吸尘头、连接管和集尘箱,所述吸尘头安装于所述第二支撑架上并接近所述切割片,所述连接管的两端分别连接所述吸尘头与集尘箱,所述集尘箱固定安装于所述平移模组上。
22.优选地,还包括:
23.仿形器,其固定安装于所述第二支撑架上并自适应所述叶片上表面,所述仿形器用于根据所述叶片上表面的形状变化调节所述切割模组的进给距离。
24.另一方面,本发明实施例还提供一种带自动仿形功能的风机叶片切割方法,包括:
25.利用平移模组将切割模组移至切割位置;
26.启动所述切割模组对叶片进行切割操作;
27.基于所述叶片的弯曲表面,利用所述平移模组、旋转模组和/或随动模组对所述切割模组进行位置调节,以使得所述切割模组对所述叶片进行自动仿形切割;其中,所述旋转模组用于驱动所述切割模组进行旋转运动,所述随动模组用于驱动所述切割模组进行升降运动。
28.优选地,所述利用平移模组将切割模组移至切割位置,包括:
29.先利用弦向组件驱动所述切割模组沿叶片弦向步进移动第一预设距离;
30.再利用径向组件驱动所述切割模组沿所述叶片径向步进移动第二预设距离,以使得所述切割模组移至所述切割位置;
31.所述启动所述切割模组对叶片进行切割操作的同时包括:
32.启动吸尘模组,以使其吸收所述切割模组切割叶片时产生的粉尘。
33.优选地,基于所述叶片的弯曲表面,利用所述平移模组、旋转模组和/或随动模组对所述切割模组进行位置调节,以使得所述切割模组对所述叶片进行自动仿形切割,包括:
34.通过压力传感器采集的信号控制所述切割模组的进给距离。
35.本发明的上述技术方案至少具有如下有益效果之一:
36.本发明公开的带自动仿形功能的风机叶片切割设备及切割方法,该切割设备利用平移模组、旋转模组、随动模组对切割模组进行多角度姿态调节,以使得切割模组自适应弯曲表面的叶片,且该设备能够适用不同尺寸结构的叶片,自动化程度高;该切割方法工艺简单、操作方便,提高叶片的切割效率。
附图说明
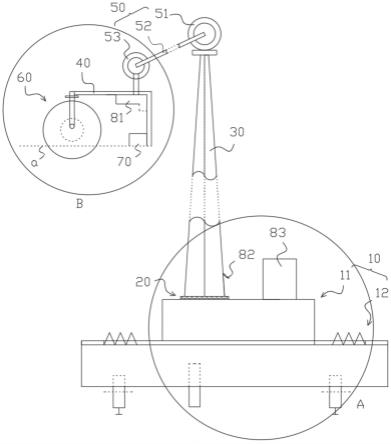
37.图1为本发明实施例提供的带自动仿形功能的风机叶片切割设备的整体结构示意图;
38.图2为图1中a处放大图;
39.图3为图1中b处放大图;
40.图4为本发明实施例提供的带自动仿形功能的风机叶片切割方法的整体流程图。
41.附图标记:
42.a、叶片;10、平移模组;11、径向组件;111、第二载体;112、齿条件;12、弦向组件;121、第一载体;122、第一导轨;123、拖链;20、旋转模组;30、第一支撑架;21、转向盘;40、第二支撑架;50、随动模组;51、第一驱动组件;52、随动架;53、第二驱动组件;60、切割模组;61、切割片;62、压力传感器;70、仿形器;81、吸尘头;82、连接管;83、集尘箱。
具体实施方式
43.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
44.本发明实施例提供一种带自动仿形功能的风机叶片切割设备,该切割设备利用平移模组10驱动切割模组60在水平方向上移动,利用旋转模组20驱动切割模组60进行旋转运动,以及利用随动模组50驱动切割模组60进行竖直方向上的升降运动,利用平移模组10、旋转模组20和随动模组50不仅调节切割模组60在切割之前的位置姿态以使其移至切割位置,且用于调节切割模组60切割过程中的位置姿态,以使得切割模组60适应弯曲的叶片a表面,自动化程度高,提高叶片a的切割效率。
45.下面首先结合附图具体描述根据本发明实施例的一种带自动仿形功能的风机叶片切割设备。
46.具体的,如图1所示,本发明实施例提供的一种带自动仿形功能的风机叶片切割设备,该设备包括平移模组10、旋转模组20、第一支撑架30、随动模组50、第二支撑架40和切割模组60;其中,
47.旋转模组20安装于平移模组10上,第一支撑架30安装于旋转模组20上,第一支撑架30在旋转模组20与平移模组10的作用下分别做旋转运动与平移运动;随动模组50一端安装于第一支撑架30的顶端;第二支撑架40连接于随动模组50的另一端;切割模组60安装于第二支撑架40上,并用于对叶片a进行切割;其中,
48.随动模组50包括随动架52、第一驱动组件51和第二驱动组件53,第一驱动组件51固定安装于第一支撑架30的顶端,第二驱动组件53固定安装于第二支撑架40上,随动架52的两端分别连接于第一驱动组件51与第二驱动组件53上,随动架52在第一驱动组件51与第二驱动组件53的驱动力下沿竖直方向运动。第一驱动组件51与第二驱动组件53优选为伺服电机驱动,当然并不仅限于此。
49.也就是说,切割模组60在平移模组10的驱动下在水平方向进行位置调节,切割模组60在旋转模组20的驱动下绕第一支撑架30的轴线进行旋转运动,切割模组60在随动模组
50的驱动下在竖直方向上做升降运动;也即,切割模组60在平移模组10、旋转模组20和随动模组50的作用下进行四轴运动,以满足切割模组60适应叶片a的弯曲表面,进一步提高切割模组60的切割效率。
50.在一实施例中,如图1所示,该切割设备还包括吸尘模组,吸尘模组安装于第二支撑架40上并与切割模组60相邻设置,吸尘模组用于吸收切割模组60切割叶片a产生的粉尘。
51.在切割模组60对风机叶片进行切割的过程中会产生大量的树脂粉尘,将吸尘模组设置于邻近切割模组60并利用吸尘模组与切割模组60同时进行工作,不仅降低切割模组60切割时产生的粉尘造成的污染且能实现树脂粉尘的回收。
52.在一实施例中,如图2所示,平移模组10包括弦向组件12和径向组件11,其中,
53.弦向组件12包括第一载体121、第一导轨122、弦向驱动件(图中未显示)和第一滑块(图中未显示),第一导轨122与弦向驱动件固定安装于第一载体121上,第一导轨122与第一滑块滑动连接,第一支撑架30安装于第一滑块上,第一支撑架30在弦向驱动件的驱动力下沿第一导轨122方向做运动;弦向组件12还包括拖链123,拖链123便于第一滑块与第一载体121做运动。
54.径向组件11包括第二载体111、齿条件112、齿轮件(图中未显示)和径向驱动件(图中未显示),齿条件112与径向驱动件固定安装于第二载体111上,第二载体111固定安装于第一滑块上,齿条件112啮合齿轮件,第一支撑架30安装于齿轮件上,第一支撑架30在径向驱动件与弦向驱动件的驱动力下分别沿齿条件112方向与第一导轨122方向运动。
55.也就是说,平移模组10进一步利用弦向组件12与径向组件11分别对切割模组60的位置姿态进行调节,以满足切割模组60的多方向位置调节,进一步提高切割模组60与风机叶片的弯曲表面的匹配度。
56.在一实施例中,旋转模组20包括转向盘21与旋转驱动件(图中未显示),转向盘21安装于旋转驱动件,旋转驱动件固定安装于第二载体111上,第一支撑架30固定安装于转向盘21上,第一支撑架30在旋转驱动件的驱动力下跟随转向盘21做旋转运动。旋转驱动件优选为旋转电机,当然并不仅限于此。旋转模组20满足切割模组60斜向切割叶片。
57.在一实施例中,如图3所示,切割模组60包括第三驱动组件(图中未显示)、切割片61和压力传感器62,切割片61安装于第三驱动组件上,第三驱动组件固定安装于第二支撑架40上,切割片61在第三驱动组件的驱动力下进行切割操作,压力传感器62位于切割片61的上方,压力传感器62用于采集切割片61处于切割状态时的数据。第三驱动组件优选为电机驱动,当然并不仅限于此。
58.径向组件11响应压力传感器62采集的信号并配合切割模组60指示进行径向移动实现下一段径向切割,在径向切割完成后,设定径向步进移动距离,每次到位后停止,然后弦向组件12响应压力传感器62信号并配合切割模组60指示进行弦向移动切割,一段弦向切割完成后重复进行一段弦向切割;利用压力传感器62配合切割模组60进行切割,提高切割效率与切割精度。
59.在一实施例中,如图1所示,吸尘模组包括吸尘头81、连接管82和集尘箱83,吸尘头81安装于第二支撑架40上并接近切割片61,连接管82的两端分别连接吸尘头81与集尘箱83,集尘箱83固定安装于平移模组10上。将集尘箱83安装于平移模组10上并利用连接管82连接吸尘头81,降低第二支撑架40的压力以及随动模组50的调节压力。
60.在一实施例中,该切割设备还包括仿形器70,仿形器70固定安装于所述第二支撑架40上并自适应所述叶片上表面,所述仿形器70用于根据所述叶片上表面的形状变化调节所述切割模组60的进给距离。
61.仿形器70用于根据叶片表面形状的变化自动调节切割片的进给距离来控制切割深度,避免切割片因叶片形状变化而导致其受力出现巨大波动。在切割片进行切割叶片的过程中,仿形器位于切割片移动方向的前方以匹配叶片表面的形状。仿形器自适应叶片表面形状的方式本发明实施例不做限定。
62.本发明实施例还提供一种带自动仿形功能的风机叶片切割方法,如图4所示,包括如下步骤:
63.s1、利用平移模组10将切割模组60移至切割位置。
64.也就是说,切割模组60在平移模组10的驱动下移至叶片上的切割位置。
65.s2、启动切割模组60对叶片进行切割操作。
66.也就是说,当切割模组60移至切割位置后,开始启动切割模组60进行切割操作。
67.s3、基于叶片的弯曲表面,利用平移模组10、旋转模组20和/或随动模组50对切割模组60进行位置调节,以使得切割模组60对叶片进行自动仿形切割;其中,旋转模组20用于驱动切割模组60进行旋转运动,随动模组50用于驱动切割模组60进行升降运动。
68.在一实施例中,在步骤s1中还包括:
69.先利用弦向组件12驱动切割模组60沿叶片弦向步进移动第一预设距离;
70.再利用径向组件11驱动切割模组60沿叶片径向步进移动第二预设距离,以使得切割模组60移至切割位置。
71.在一实施例中,在步骤s3中还包括:
72.通过压力传感器62采集的信号控制切割模组60的进给距离。
73.径向组件11响应压力传感器62采集的信号并配合切割模组60指示进行径向移动实现下一段径向切割,在径向切割完成后,设定径向步进移动距离,每次到位后停止,然后弦向组件12响应压力传感器62信号并配合切割模组60指示进行弦向移动切割,一段弦向切割完成后重复进行一段弦向切割;利用压力传感器62配合切割模组60进行切割,提高切割效率与切割精度。
74.进一步的,在步骤s3中还包括:
75.当切割模组在切割叶片的过程中,将仿形器设于切割模组前进的前方,利用仿形器匹配叶片表面形状,以使得切割模组基于仿形器匹配得到的叶片表面形状调节进给距离,进一步控制对叶片的切割深度。
76.进一步的,当切割模组60需要进行斜向切割的时候,在弦向组件12与径向组件11调节好位置后,利用旋转模组20驱动切割模组60进行旋转运动,以对叶片的不同角度方向进行切割。
77.进一步,当切割模组60需要在竖直方向上进行抬升或降低以匹配弯曲的叶片表面时,利用随动模组50驱动切割模组60进行升降运动,以对表面弯曲的叶片进行切割操作。
78.在一实施例中,在步骤s2中启动切割模组60的同时启动吸尘模组,以使其吸收切割模组60切割叶片时产生的粉尘。
79.在启动切割模组60进行切割操作的同时启动吸尘模组,不仅降低切割模组60切割
时产生的粉尘造成的污染且能实现树脂粉尘的回收。
80.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1