一种用于激光焊接的激光镜组焦点标定装置的制作方法
1.本发明涉及激光切割设备技术领域,具体为一种用于激光焊接的激光镜组焦点标定装置。
背景技术:
2.工业机器人使用过程中经常在机器人末端法兰面安装不同的工具来满足实际生产需求,为了准确控制工具运动的位置与姿态,需要对工具所在坐标系进行标定。
3.目前激光焊接的激光镜组焦点标定装置,其安装位置固定,对于一些刁钻角度,难以进行调节,还会出现由于调节装置的长度以及移动范围限制,某些位置难以标注现象发生,实际使用范围受限。
技术实现要素:
4.针对现有技术存在的不足,本发明目的是提供一种用于激光焊接的激光镜组焦点标定装置,可更大范围的对于焦点标定装置进行调节,适用范围更广,另外也可精准指示处焦点的位置。
5.为了实现上述目的,本发明是技术方案如下:
6.作为本发明是通过如下的技术方案来实现:一种用于激光焊接的激光镜组焦点标定装置,包括激光扫描镜组和精调机构,所述激光扫描镜组上磁性吸合粗调机构;
7.所述粗调机构包括第一自由导向臂、固定件、第二自由导向臂,所述固定件两侧对称固定有第一自由导向臂,所述固定件底部中心处固定有第二自由导向臂;
8.所述第二自由导向臂底部设有精调机构,所述精调机构上设有指针,所述粗调机构大范围调节指针位置,所述精调机构小范围调节指针位置。
9.优选的,所述第一自由导向臂顶部固定有磁力座,所述磁力座吸合设置在激光扫描镜组上限制粗调机构整体位置。
10.优选的,所述磁力座顶部中间部位开设有凹槽,所述磁力座顶部位于凹槽两侧为平面结构。
11.优选的,所述第一自由导向臂和第二自由导向臂机构相同;
12.所述第一自由导向臂包括第一转动副、第一连接杆、第二转动副、锁紧把手、第二连接杆和第三转动副,所述第一连接杆和第二连接杆一端之间设有第二转动副,所述第二转动副上设有锁定第二转动副转动的锁紧把手,所述第一连接杆另一端设有第一转动副,所述第二连接杆另一端设有第三转动副。
13.优选的,所述第一转动副和第三转动副结构相同;
14.所述第一转动副包括球形凹槽管和球杆,所述球形凹槽管固定在第一连接杆上,所述球杆的球形端连接至球形凹槽管中,所述球杆位于球形凹槽管中自由转动。
15.优选的,所述第二转动副包括连接轴,所述连接轴中间部位固定有固定环,所述连接轴上位于固定环一侧转动连接有第一连接套,所述固定环端部位于第一连接套中设有限
位盘,所述限位盘限制第一连接套不脱离连接轴,所述连接轴上位于固定环另一侧固定有第二连接套,所述第一连接套上固定连接第一连接杆,所述第二连接套上固定连接第二连接杆。
16.优选的,所述固定件包括固定座、连接孔和连接槽,所述固定座两侧螺栓连接第一自由导向臂,所述固定座底部中心处螺栓连接第二自由导向臂,所述固定座两侧对称开设有连接孔,所述固定座两端开设有连通连接孔的连接槽。
17.优选的,所述精调机构包括基座、固定块、滑轨块和指针座,所述基座和指针座两者接触面一端设有固定圆珠,所述基座和指针座之间两侧远离固定圆珠上设有定位销和拉伸弹簧,所述拉伸弹簧穿过基座连接定位销,所述定位销固定在固定圆珠上,两个所述拉伸弹簧一端分别连接第一调节手柄和第三调节手柄;
18.所述指针座上固定有指针夹合头,所述指针夹合头上固定有指针;
19.所述基座中间部位滑动设置有滑轨块,所述滑轨块中设有压缩弹簧,所述压缩弹簧卡合在基座中,所述压缩弹簧一端固定连接基座,所述压缩弹簧另一端连接第二调节手柄,所述滑轨块上开设有连接第二自由导向臂的限位孔;
20.所述基座上固定有限制滑轨块单一方向来回移动的固定块。
21.优选的,所述基座、滑轨块和固定块的接触面上均开设有v形滑槽,所述v形滑槽中滑动设置有滚珠,所述基座和滑轨块之间以及滑轨块和固定块之间均设有保持架,所述保持架卡合滚珠。
22.与现有技术相比,本发明的有益效果为:
23.1、一方面在使用过程中,可将该焦点标定装置连接到激光扫描镜组上的任意位置,进行临时存放,方便用户对于该焦点标定装置进行快速定位,另一方面可更大范围的对于焦点标定装置进行调节,适用范围更广,另外也可精准指示处焦点的位置;
24.2、通过粗调机构和精调机构的设置,可指针调节位置更加精准,激光焦点指示位置准确,机器人的调节效果更好,对于加工件后期激光焊接质量更高;
附图说明
25.参照附图来说明本发明的公开内容。应当了解,附图仅仅用于说明目的,而并非意在对本发明的保护范围构成限制,在附图中,相同的附图标记用于指代相同的部件。其中:
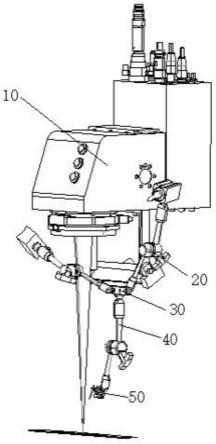
26.图1为本发明激光焊接的激光镜组焦点标定装置的整体结构示意图;
27.图2为本发明第一自由导向臂、固定件和第二自由导向臂连接处的结构示意图;
28.图3为本发明第一自由导向臂和第二自由导向臂的结构示意图;
29.图4为本发明的第二转动副结构示意图;
30.图5为本发明固定件的结构示意图;
31.图6为本发明精调机构的结构示意图;
32.图7为本发明精调机构的爆炸图。
33.图中标注说明:10、激光扫描镜组;20、第一自由导向臂;21、第一转动副;22、第一连接杆;23、第二转动副;231、连接轴;232、固定环;233、限位盘;234、第一连接套;235、第二连接套;24、锁紧把手;25、第二连接杆;26、第三转动副;30、固定件;31、固定座;32、连接孔;33、连接槽;40、第二自由导向臂;50、精调机构;501、固定圆珠;502、定位销;503、拉伸弹簧;
51、基座;511、指针夹合头;52、固定块;53、滑轨块;531、v形滑槽;532、限位孔;533、压缩弹簧;54、指针座;55、第一调节手柄;56、第二调节手柄;57、第三调节手柄;58、保持架;59、滚珠;60、磁力座;70、指针。
具体实施方式
34.容易理解,根据本发明的技术方案,在不变更本发明实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本发明的技术方案的示例性说明,而不应当视为本发明的全部或者视为对本发明技术方案的限定或限制。
35.如图1-2所示,作为本发明的一种用于激光焊接的激光镜组焦点标定装置,包括激光扫描镜组10和精调机构50,激光扫描镜组10上磁性吸合粗调机构;
36.粗调机构包括第一自由导向臂20、固定件30、第二自由导向臂40,固定件30两侧对称固定有第一自由导向臂20,固定件30底部中心处固定有第二自由导向臂40;该种结构设置,一方面在使用过程中,可将该焦点标定装置连接到激光扫描镜组10上的任意位置,进行临时存放,方便用户对于该焦点标定装置进行快速定位,另一方面可更大范围的对于焦点标定装置进行调节,适用范围更广,另外也可精准指示处焦点的位置,使用效果更好;
37.激光扫描镜组10上磁性吸合粗调机构,该种结构设置,可使得焦点标定装置的安装和拆卸效率提高,便于用户进行操作。
38.第二自由导向臂40底部设有精调机构50,精调机构50上设有指针70,粗调机构大范围调节指针70位置,精调机构50小范围调节指针70位置。
39.该种结构设置,可对于指针70位置进行精准调节,使得焦点的指示位置更加准确,对于机械臂位置及活动路径调整更加准确,对于激光焊接效果更好。
40.如图3所示,第一自由导向臂20顶部固定有磁力座60,磁力座60吸合设置在激光扫描镜组10上限制粗调机构整体位置。
41.通过磁力座60的设置,可使得该焦点标定装置安放更加灵活,可将该焦点标定装置安放置合适位置的激光扫描镜组10上,一方面适用范围更广,另一方面对于焦点标定装置的安装和拆卸更加方便,可提高安装和拆卸效率。
42.如图3所示,磁力座60顶部中间部位开设有凹槽,磁力座60顶部位于凹槽两侧为平面结构,该种结构设置,使得磁力座60适用于激光扫描镜组10上的部分凸起部位,焦点标定装置的安装固定范围更广。
43.如图2-3所示,第一自由导向臂20和第二自由导向臂40机构相同;
44.第一自由导向臂20包括第一转动副21、第一连接杆22、第二转动副23、锁紧把手24、第二连接杆25和第三转动副26,第一连接杆22和第二连接杆25一端之间设有第二转动副23,第二转动副23上设有锁定第二转动副23转动的锁紧把手24,第一连接杆22另一端设有第一转动副21,第二连接杆25另一端设有第三转动副26。
45.通过多个转动副的设置,可使得第一自由导向臂20和第二自由导向臂40的转动角度更多,对于指针70的调节方式更多,可转动角度更多,指针70的调节效果更好;第一连接杆22和第二连接杆25一端之间设有第二转动副23,可使得第一自由导向臂20和第二自由导向臂40转动时的路径更长,调节的范围更大,指针70调节效果更好;第一连接杆22另一端设
有第一转动副21,第二连接杆25另一端设有第三转动副26,可使得第一连接杆22和第二连接杆25的转动角度进一步得到扩大,从而进一步方便用户对于指针70进行调节。
46.如图2-3所示,第一转动副21和第三转动副26结构相同;
47.第一转动副21包括球形凹槽管和球杆,球形凹槽管固定在第一连接杆22上,球杆的球形端连接至球形凹槽管中,球杆位于球形凹槽管中自由转动,该种结构设置,可使得第一自由导向臂20和第二自由导向臂40的转动角度更大,适用范围更广,球形凹槽管和球杆的接触面中均设置有凹凸层,可使得球杆位于球形凹槽管之间的摩擦阻力更大,球杆转动至合适位置时,球杆与球形凹槽管之间的位置相对会稳定,不会产生晃动现象,指针70的指针位置更加准确。
48.如图4所示,第二转动副23包括连接轴231,连接轴231中间部位固定有固定环232,连接轴231上位于固定环232一侧转动连接有第一连接套234,固定环232端部位于第一连接套234中设有限位盘233,限位盘233限制第一连接套234不脱离连接轴231,连接轴231上位于固定环232另一侧固定有第二连接套235,第一连接套234上固定连接第一连接杆22,第二连接套235上固定连接第二连接杆25。
49.具体的,第一连接套234和连接轴231之间可相对进行转动,从而调节第一连接杆22与第二连接杆25之间的相对角度,使得第一自由导向臂20和第二自由导向臂40的转动调节范围更广,对于第二转动副23整体进行限位时,可通过转动锁紧把手24,使得第一连接套234相对于连接轴231之间的位置限定,两者之间不发生转动现象,即可锁定第二转动副23,该种方式,可方便用户对于第一连接杆22和第二连接杆25进行位置上的调节,使用效果更好。
50.如图5所示,固定件30包括固定座31、连接孔32和连接槽33,固定座31两侧螺栓连接第一自由导向臂20,固定座31底部中心处螺栓连接第二自由导向臂40,固定座31两侧对称开设有连接孔32,固定座31两端开设有连通连接孔32的连接槽33。
51.第一自由导向臂20和第二自由导向臂40通过螺栓固定在固定座31上,该种方式可使得第一自由导向臂20和第二自由导向臂40的安装位置更加稳定;固定座31两侧对称开设有连接孔32,可将另外的杆状部件放置到连接孔32中,对于固定座31进行临时限位,该种结构,可使得焦点标定装置的连接方式更多,其适用范围进一步得到提升。
52.如图6-7所示,精调机构50包括基座51、固定块52、滑轨块53和指针座54,基座51和指针座54两者接触面一端设有固定圆珠501,基座51和指针座54之间两侧远离固定圆珠501上设有定位销502和拉伸弹簧503,拉伸弹簧503穿过基座51连接定位销502,定位销502固定在固定圆珠501上,两个拉伸弹簧503一端分别连接第一调节手柄55和第三调节手柄57;
53.指针座54上固定有指针夹合头511,指针夹合头511上固定有指针70;
54.基座51中间部位滑动设置有滑轨块53,滑轨块53中设有压缩弹簧533,压缩弹簧533卡合在基座51中,压缩弹簧533一端固定连接基座51,压缩弹簧533另一端连接第二调节手柄56,滑轨块53上开设有连接第二自由导向臂40的限位孔532;
55.基座51上固定有限制滑轨块53单一方向来回移动的固定块52。
56.该种结构设置的精调机构50,可使得指针70在x\y\z三个方向上进行移动,指针70可进行小范围进行调节,指针70调节更加精准,对于焦点的指示效果更好;第一调节手柄55和第三调节手柄57的转动,可使得指针座54绕着基座51和指针座54之间的固定圆珠501进
行转动,从而从两个方向对于指针70进行调节;
57.第二调节手柄56转动,可调节滑轨块53相对基座51之间的位置,从而使得指针70进行第三个方向调节,即可全方位调节指针70的位置,对于指针70进行精准调节,使用效果更好。
58.如图7所示,基座51、滑轨块53和固定块52的接触面上均开设有v形滑槽531,v形滑槽531中滑动设置有滚珠59,基座51和滑轨块53之间以及滑轨块53和固定块52之间均设有保持架58,保持架58卡合滚珠59,通过该种结构设置,可使得滑轨块53相对基座51之间的移动更加平稳,对于指针70的调节效果更好。
59.使用时,用户根据实际情况,利用固定件30上的两组第一自由导向臂20将焦点标定装置整体安放置激光扫描镜组10上,用户在对于指针70进行调节时,可转动第一自由导向臂20和第二自由导向臂40,从而对于第二自由导向臂40底部连接的精调机构50位置得到调节,对于指针70进行大范围粗调节,再利用精调机构50对于指针70进行小范围进行调节,从而精准指示出激光焦点位置。
60.本发明的技术范围不仅仅局限于上述说明中的内容,本领域技术人员可以在不脱离本发明技术思想的前提下,对上述实施例进行多种变形和修改,而这些变形和修改均应当属于本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1